

Билет № 1
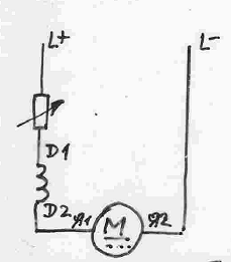
1 Регулировка скорости ДПТ последовательного возбуждения изменением сопротивления в цепи якоря.
 У
такого двигателя ток якоря является
одновременно и током возбуждения, т.к.
обмотка возбуждения включена
последовательно с якорем. По этой причине
магнитный поток двигателя изменяется
с изменением нагрузки. Скорость двигателя
:
У
такого двигателя ток якоря является
одновременно и током возбуждения, т.к.
обмотка возбуждения включена
последовательно с якорем. По этой причине
магнитный поток двигателя изменяется
с изменением нагрузки. Скорость двигателя
:
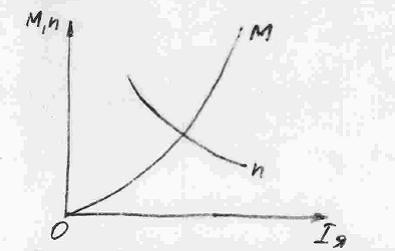
Скоростная характеристика двигателя посл. возбуждения.
На этом графике представлена скоростная характеристика двигателя последовательного возбуждения.
Из этой характеристики видно, что скорость двигателя сильно зависит от нагрузки. При увеличении нагрузки увеличивается падение на сопротивлении обмоток при одновременном увеличении магнитного потока, что приводит к значительному уменьшению скорости вращения. Поэтому такие двигатели не следует пускать вхолостую или с малой нагрузкой. Двигатели с последовательным возбуждением применяют в тех случаях, когда необходим большой пусковой момент или способность выдерживать кратковременные перегрузки. Они используются в качестве тяговых двигателей в трамваях, троллейбусах, метро и электровозах, а также на подъёмных кранах и для пуска двигателей внутреннего сгорания (стартеры).
2. электродинамическое Торможения асинхронного двигателя
Динамическое торможение (электродинамическое торможение) — вид торможения асинхронных электродвигателей, при котором обмотка статора отключается от сети переменного тока и включается на постоянное напряжение. Этот тормозной режим используется для точной остановки двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т. е. он станет тормозным. Под действием этого момента происходит торможение. Кинетическая энергия вращающихся частей переходит в теплоту, выделяющуюся в цепи ротора за счет токов, индуктированных в ней неподвижным полем статора. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать величину тормозного момента. Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После остановки двигатель нужно отключить от сети постоянного тока. Данный вид торможения применяется, например, в подъёмно-транспортных машинах, в электротранспорте и др.
Билет № 2
1 Регулирование скорости АД изменением числа пар полюсов.
Изменение числа пар полюсов. Для изменения числа пар имеющихся полюсов асинхронного двигателя его статор делают или с двумя независимыми трехфазными обмотками, или же с одной трехфазной обмоткой, на которой можно осуществлять пересоединение на различные числа полюсов электродвигателя. На катушке статора создают четыре электромагнитных полюса. Эти же статорные катушки, которые соединены между собой параллельно, создадут только лишь 2 полюса. Дальнейшее пересоединение статорных обмоток осуществляется с помощью специального контроллера. При этом варианте управление скоростью вращения асинхронного двигателя происходит скачками. Асинхронные двигатели выпускаются с 750, 1000, 1500 и 3000 оборотов в минуту. Непосредственную регулировку скорости вращения асинхронного двигателя, через изменение числа полюсов, можно делать только у асинхронных двигателей (имеющих короткозамкнутый ротор). Ротор электродвигателя с короткозамкнутой обмоткой (в виде беличьего колеса) может функционировать при разных числах полюсов электромагнитного поля. Ротор электродвигателя, имеющий фазную обмотку, может работать нормально только лишь при строго определенном количестве полюсов магнитного поля статора. В противном случае, фазную обмотку ротора электродвигателя пришлось бы переключать, а это в свою очередь внесёт значительное усложнения в схему электрического двигателя.
2. Торможение электродвигателей постоянного тока
Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом ектродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.