

2 lectures
.pdf3.2 Временные характеристики
3.2.1 Понятие временных характеристик
В теории автоматического управления под временными характеристиками понимают реакции динамических систем на некоторые типовые входные воздействия.
Чаще всего в качестве типовых входных воздействий рассматривают следующие функции времени (см. рисунок 3.2):
Рис. 3.2
Определения:
Переходной характеристикой динамической системы называется ее реакция на единичный ступенчатый сигнал.
Обозначим как h(t).
Импульсной |
характеристикой |
динамической |
системы |
называется |
ее |
реакция |
на |
“дельта”-функцию. |
Обозначим как k(t).
Примечание. Несложно доказать, что импульсная характеристика k(t) есть производная от переходной характеристики h(t).
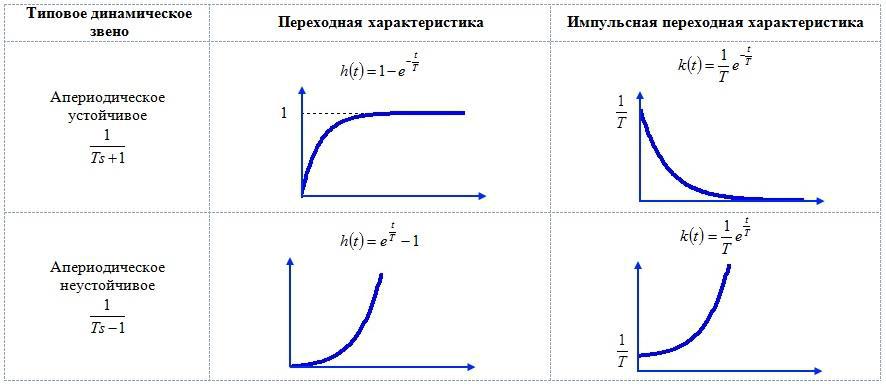
3.2.2 Переходная и импульсная характеристики типовых динамических звеньев
Далее приводятся реакции на единичный ступенчатый сигнал и дельта-функцию систем, представленными типовыми динамическими звеньями (рисунок 3.3). При этом рассматриваются лишь звенья, описываемые полиномом знаменателя передаточной функции. Здесь следует вспомнить, что порядок полинома числителя передаточной функции не может превышать порядок полинома знаменателя, и,
следовательно, нет смысла рассматривать временные характеристики отдельно для дифференцирующих звеньев.
Рис. 3.3
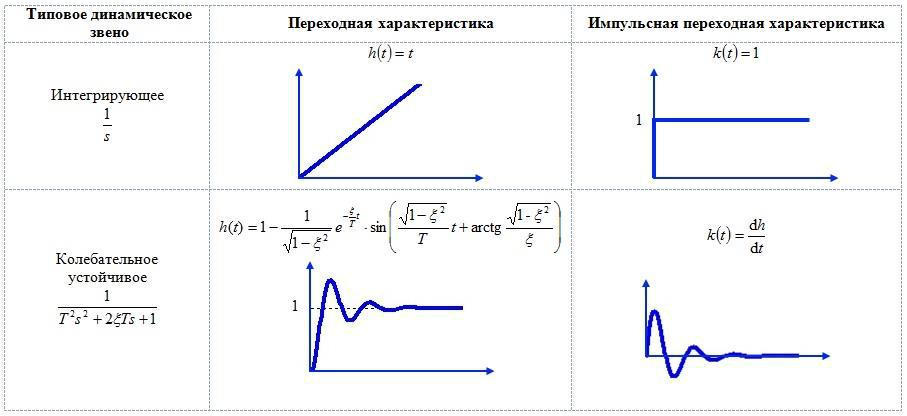
Рис. 3.3 (продолжение)
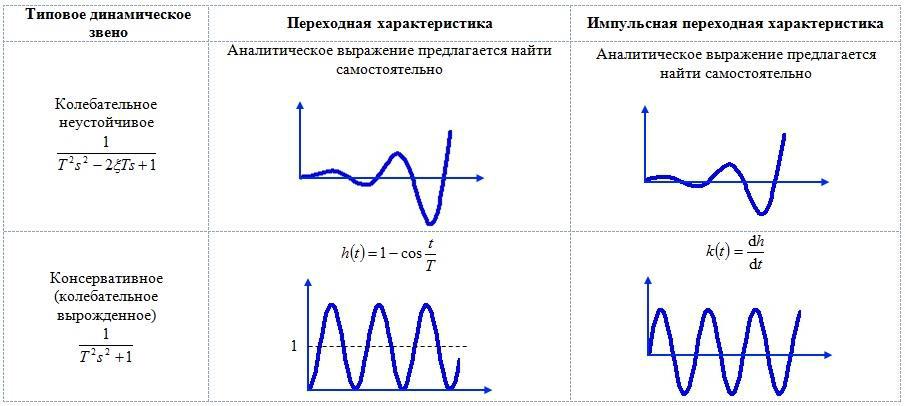
Рис. 3.3 (продолжение)
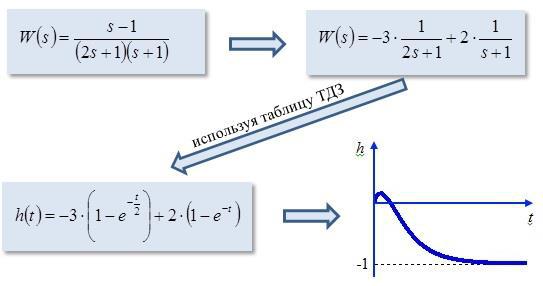
3.2.3 Отыскание аналитических выражений временных характеристик сложных систем
Для нахождения аналитических выражений временных характеристик систем, в составе передаточных функций которых находятся несколько типовых динамических звеньев, удобно воспользоваться принципом суперпозиции. Этот подход иллюстрирует рисунок 3.4 на примере сложной системы, заданной определенной передаточной функцией.
Рис. 3.4
3.3 Частотные характеристики
3.3.1 Понятие частотных характеристик
При исследовании частотных характеристик некоторой динамической системы предполагается, что на ее вход подается гармонический сигнал u(t) = Aвхsinωt. На выходе при этом по истечении определенного времени устанавливается сигнал yуст(t) = Aвыхsin(ωt + θ). Причем амплитуда и фаза установившегося гармонического сигнала по отношению к входному сигналу зависит от частоты ω. В связи с этим и вводят понятия частотных характеристик (рисунок 3.5).
Рис. 3.5
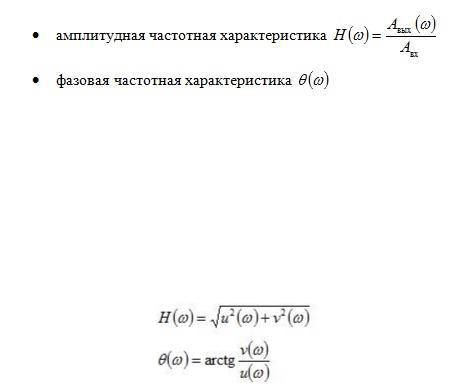
Если известна передаточная функция W(s) некоторой исследуемой системы, то аналитические выражения ее частотных характеристик можно легко найти, используя замену s = jω. В результате получаем передаточную функцию в комплексной форме W(jω) = u(ω) + jv(ω),
где u(ω) и v(ω) – действительная и мнимая части передаточной функции соответственно. При этом амплитудной частотной характеристикой будет являться модуль, а фазовой частотной характеристикой – фаза полученной комплексной передаточной функции (рисунок 3.6).
Рис. 3.6
В теории автоматического управления частотные характеристики графически представляются, как правило, в виде так называемых
годографа передаточной функции и логарифмических амплитудной и фазовой частотной характеристик (ЛАФЧХ).
Определение. Амплитудно-фазовой частотной характеристикой или годографом передаточной функции называют траекторию,
описываемую вектором передаточной функции W(jω) на комплексной плоскости при изменении частоты от нуля до бесконечности.
ЛАФЧХ предполагает построение амплитудной и фазовой частотных характеристик в логарифмическом масштабе, при этом руководствуются следующими правилами:
частота ω откладывается в логарифмическом масштабе,
амплитудная характеристика рассматривается в децибелах: L(ω) = 20lgH(ω).

3.3.2 Частотные характеристики типовых динамических звеньев
Рис. 3.7
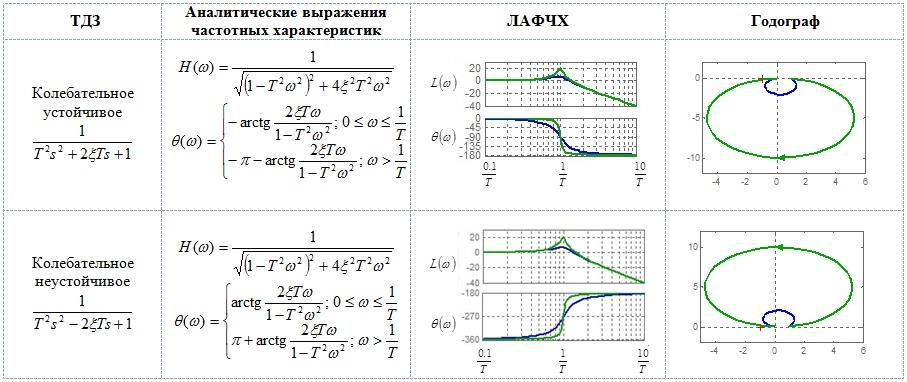
Рис. 3.7 (продолжение)
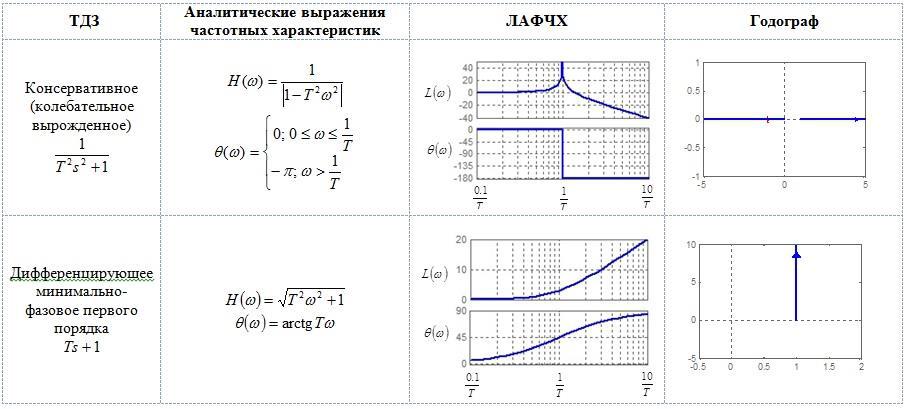
Рис. 3.7 (продолжение)