

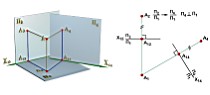
Замена фронтальной плоскости проекций (преобразование системы п2/п1 в систему п4/п1)
Исходная (старая) система плоскостей
проекций П2/П1, точка А
пространства, ее ортогональные, проекции
А1 и А2, изображены на рис.
3.2.
Р
 ис.
3.2
ис.
3.2
Заменим фронтальную плоскость проекций П2, новой плоскостью П4 (которую условно будем называть тоже фронтальной), перпендикулярной к П1, и образующей с плоскостью П2 некоторый угол (в случае проецирования точки этот угол произволен). В результате получим новую систему плоскостей проекций П4/П1. Плоскость П1 является общей для старой и новой систем плоскостей проекций. В новой системе П4/П1 имеем: X14 = П1 П4 - новая ось проекций, А1 и А4 - ортогональные проекции точки А. При переходе от старой системы П2/П1 к новой П4/П1 остаются неизменными (являются инвариантами преобразования): 1) плоскость П1 и точка А; 2) горизонтальная проекция А1, точки А; 3) расстояние точки А до плоскости П1, т. е. | AA1 | = | A2A12 | = | A4A14 |. Выявленные инварианты преобразования позволяют построить по комплексному чертежу точки в старой системе плоскостей проекций ее комплексный чертеж в повой системе. Для этого на комплексном чертеже точки А (А1,А2) проводим новую ось проекций х14 (рис. 3.2), положение которой определяется положением новой фронтальной плоскости проекций П4. Из точки А1 проводим линию связи, перпендикулярную новой оси проекций х14. На линии связи от точки А14 откладываем отрезок | А14А4 | = | А12А2 |. Полученная таким образом точка А4 является проекцией точки А на плоскость П4. В новой системе плоскостей проекций П4/П1 положение точки А определяется проекциями А1 и А4.
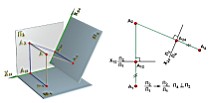
Замена горизонтальной плоскости проекций (преобразование системы п2/п1 в систему п2/п4)
Исходная (старая) система плоскостей
проекций П2/П1, точка А
пространства, ее ортогональные, проекции
А1 и А2, изображены на рис.
3.4.
Р
 ис.
3.4
ис.
3.4
Заменим горизонтальную плоскость
проекций П1, новой плоскостью П4
(которую условно будем называть тоже
горизонтальной), перпендикулярной к
П2, и образующей с плоскостью П1
некоторый угол (в случае проецирования
точки величина угла произвольна). В
результате получим новую систему
плоскостей проекций
П2/П4.
Плоскость П2, является общей для
старой и новой систем плоскостей
проекций. В новой системе П2/П4
имеем: X24 = П2
П4 - новая ось проекций, А2 и
А4 - ортогональные проекции точки
А.
При переходе от старой системы
П2/П1 к новой П2/П4
остаются неизменными (являются
инвариантами преобразования): 1) плоскость
П2 и точка А; 2) фронтальная проекция
А2, точки А; 3) расстояние точки А
до плоскости П2, т. е. | AA2 | =
| A1A12 | = | A4A24
|.
Выявленные инварианты преобразования
позволяют построить по комплексному
чертежу точки в старой системе плоскостей
проекций ее комплексный чертеж в повой
системе. Для этого на комплексном чертеже
точки А (А1,А2) проводим новую
ось проекций х24 (рис. 3.4), положение
которой определяется положением новой
горизонтальной плоскости проекций П4.
Из точки А2 проводим линию связи,
перпендикулярную новой оси проекций
х24. На линии связи от точки А24
откладываем отрезок | А24А4
| = | А12А1 |. Полученная точка
А4 является проекцией точки А на
плоскость П4. В новой системе
плоскостей проекций П2/П4
положение точки А определяется проекциями
А2 и А4.
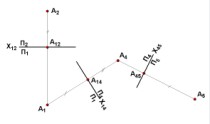
При необходимости
выполнить две последовательные замены
плоскостей проекций преобразование
выполняется так, как показано на рис.
3.6. Подумайте и выполните преобразование
комплексного чертежа точки А в системе
П2/П1 в комплексный чертеж
в системе П2/П4, а затем в
системе П4/П5.
Р
 ис.
3.6
ис.
3.6
При решении задач с применением способа замены плоскостей проекций удобнее исходный комплексный чертеж задавать в осной системе изображения. Если же исходный чертеж выполнен в безосной системе, то можно зафиксировать плоскости проекций П1 и П2 в каком-либо удобном положении. Эта пространственная операция отражается на комплексном чертеже проведением оси проекций между горизонтальной и фронтальной проекциями объекта.