

3.2. Скорости точек твердого тела при плоском движении
3.2.1. Метод полюса

Рис.3.4
На рис.3.4 представлено положение плоской фигуры S и ее отрезка PM в неподвижной системе координат OXYZ, Для произвольного момента времени справедливо векторное равенство:
![]() (3.3)
(3.3)
При движении плоской фигуры векторы
![]() и
и
![]() изменяются и по модулю и по направлению,
вектор же
изменяются и по модулю и по направлению,
вектор же
![]() изменяется только по направлению,
так как его модуль равен для твердого
тела расстоянию между точками P
и M. Продифференцировав
по времени равенство (3.3), получим:
изменяется только по направлению,
так как его модуль равен для твердого
тела расстоянию между точками P
и M. Продифференцировав
по времени равенство (3.3), получим:
Обозначив
 и назвав
и назвав
![]() скоростью точки M
тела при вращении его вокруг оси Pz’,
проходящей через полюс P
перпендикулярно плоскости плоской
фигуры, получим
скоростью точки M
тела при вращении его вокруг оси Pz’,
проходящей через полюс P
перпендикулярно плоскости плоской
фигуры, получим
![]() (3.4)
(3.4)
Рассмотрим вектор
.
Поскольку вектор
вектор
постоянного модуля, то
=
![]() ,
где
вектор, лежащий в плоскости фигуры,
перпендикулярный
и направленный против хода
часовой стрелки. Тогда вектор
лежит в плоскости фигуры, перпендикулярен
отрезку PM,
соединяющему точку M
с полюсом P, и
направлен в сторону вращения плоской
фигуры вокруг оси Pz’
(рис.3.4).
,
где
вектор, лежащий в плоскости фигуры,
перпендикулярный
и направленный против хода
часовой стрелки. Тогда вектор
лежит в плоскости фигуры, перпендикулярен
отрезку PM,
соединяющему точку M
с полюсом P, и
направлен в сторону вращения плоской
фигуры вокруг оси Pz’
(рис.3.4).
Модуль вектора определяется как:
 (3.5)
(3.5)
Применив векторную формулу Эйлера, определяющую вектор скорости точки тела, вращающегося вокруг оси, равный векторному произведению вектора угловой скорости тела на радиус-вектор точки относительно какой-либо точки, лежащей на оси вращения тела (см. 2.14):
![]()
можно представить выражение (3.5) в векторной форме:

Окончательно имеем выражение для определения скоростей точек плоской фигуры методом полюса:
![]()
![]() (3.6)
(3.6)
Таким образом, скорость любой точки плоской фигуры при ее плоском движении по методу полюса равна векторной сумме скорости полюса, построенной при рассматриваемой точке M, и скорости данной точки при вращении фигуры вокруг оси Pz’, проходящей через полюс перпендикулярно плоскости плоской фигуры.
3.2.2. Метод мгновенного центра скоростей
Мгновенным центром скоростей называется
точка на плоскости, скорость которой в
данный момент времени равна нулю. Найдем
эту точку, обозначив ее
![]() .
Пусть в данный момент времени скорость
точки P, принятой за
полюс, равна
.
Пусть в данный момент времени скорость
точки P, принятой за
полюс, равна
![]() и фигура S вращается
с угловой cкоростью
и фигура S вращается
с угловой cкоростью
![]() Проведем прямую РNH,
перпендикулярную вектору
,
в направлении вращения
(рис.3.5),
отложим на этой прямой отрезок P
=
Проведем прямую РNH,
перпендикулярную вектору
,
в направлении вращения
(рис.3.5),
отложим на этой прямой отрезок P
=
![]() и определим скорость полученной точки
,
выбрав за полюс точку P:
и определим скорость полученной точки
,
выбрав за полюс точку P:
![]()
Отсюда следует, что векторы
![]() и
и
![]() должны быть равны по модулю и противоположны
по направлению. Так как вектор
перпендикулярен отрезку P
,
то прямая, на которой должна
должны быть равны по модулю и противоположны
по направлению. Так как вектор
перпендикулярен отрезку P
,
то прямая, на которой должна
н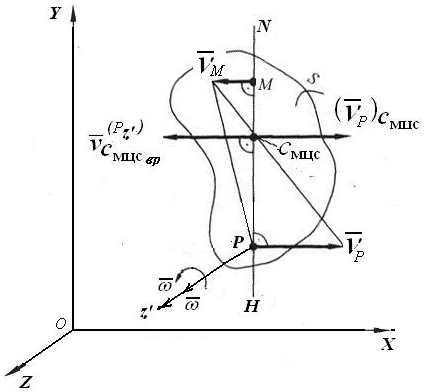 аходиться
точка
,
перпендикулярна вектору
.
Чтобы
аходиться
точка
,
перпендикулярна вектору
.
Чтобы
Рис.3.5
выполнялось условие
=
,
точка
должна находиться на прямой PNH.
Поскольку
 =
= ,
а
,
а
![]() ,
,
мгновенный радиус (расстояние от точки до мгновенного центра скоростей ) будет равен: P = .
Таким образом, приняв за полюс плоской фигуры S точку , можно определить скорость любой точки (пусть точки M) по формуле:

 (3.7)
(3.7)
где
![]() расстояние от точки
M до мгновенного
центра скоростей
.
Вектор
расстояние от точки
M до мгновенного
центра скоростей
.
Вектор
![]() перпендикулярен отрезку
и направлен в сторону вращения фигуры
вокруг оси
перпендикулярен отрезку
и направлен в сторону вращения фигуры
вокруг оси
![]() ,
проходящей через
z’,
а его модуль пропорционален мгновенному
радиусу =
.
,
проходящей через
z’,
а его модуль пропорционален мгновенному
радиусу =
.
Таким образом, скорости точек плоской
фигуры в данный момент времени вычисляются
так же, как если бы фигура вращалась
вокруг оси, проходящей через
z’
перпендикулярно плоскости плоской
фигуры и плоскости движения, с той же
угловой скоростью
![]() .
.
Метод МЦС значительно упрощает определение скоростей точек твердого тела при плоском движении. Поэтому важно уметь определять положение МЦС, т.е. точки .