

Подвійний (шестиплечий) міст постійного струму
При вимірюванні дуже малих опорів чотириплечим мостом навіть при чотирипровідному підключенні вимірюваного опору допускаються методичні похибки. В цих випадках застосовуються подвійні мости, нижня межа вимірювання яких 10‑8 Ом, а верхня – 100 Ом.
Схема подвійного моста наведена на рис.3.17 (без урахування R34, R4R та R3R).
Рисунок 3.17
Вимірюваний опір Rx та зразковий RN мають по чотири затискачі. R – опір короткого та товстого провідника, який з’єднує Rx та RN. Він включає в себе опори перехідних контактів. Значення цього опору дуже мале.
Для одержання рівняння рівноваги перетворимо трикутник опорів R3‑R‑R4 в еквівалентну зірку:
![]() .
.
Після цього отримуємо чотириплечий міст, умова рівноваги для якого має вигляд:
(3.31)
(Rx + R3R)R2 = R1(R4R + RN),
RxR2 = R1R4R + R1RN – R2R3R.
Підставимо в (3.31) формули для опорів еквівалентної зірки:
RxR2
=![]() +
R1RN
–
+
R1RN
–![]() ,
,
звідки
Rx
= RN![]() +
+![]() .
(3.32)
.
(3.32)
З (3.32) видно, що Rx залежить від R, який входить у другу складову і має дуже мале значення опору. Другу складову можна виключити (зробити її рівною нулю), якщо виконати умову: (R1R4/R2)-R3 = 0. Але точно витримати цю умову на практиці не вдається через неточності виготовлення резисторів R1, R2, R3, R4. І для того, щоб друга складова була якомога меншою, потрібно, щоб опір R був як можна меншим. Тоді можна прийняти другу складову в рівнянні (3.32) рівною нулю і вважати що
Rx = RN. (3.33)
Для того, щоб (R1R4/R2)–R3 = 0, намагаються забезпечити рівності R1 = R4 та R2 = R4. Для цього R1 та R3, а також R2 та R4 змінюють одночасно за допомогою однієї регулювальної рукоятки.
Як уже відмічалось, подвійний міст застосовується для вимірювання малих опорів. Але при малих Rx та RN і спади напруг на них малі (1 мВ), тому потрібно враховувати дію термо-е.р.с., які виникають в потенціальних контактах Rx та RN. Для зменшення похибки від термо-е.р.с. виконують два вимірювання при двох напрямках струму, які встановлюють за допомогою перемикача SA. Результат вимірювання Rx визначають як середнє арифметичне двох вимірювань.
Промисловість випускає комбіновані мости, в яких за допомогою простих перемикань можна одержати одинарний та подвійний мости.
3.4.3 Вимірювальні мости змінного струму Мости для вимірювання ємності
При вимірюванні ємності, наприклад конденсатора, необхідно враховувати, що в ньому виникають втрати, які спричинені поглинанням активної потужності.
Реальний конденсатор представляється еквівалентною схемою заміщення, послідовно (рис.3.18, а) чи паралельно (рис.3.18, б) з’єднаної ідеальної ємності з активним опором. Струм в колі такого конденсатора випереджає напругу на кут, менший ніж 900.

Рисунок 3.18
Для послідовної схеми
tg = IRx/(I/Cx) = RxCx;
для паралельної
tg = IR/IC = (U/Rx)/(UCx) = 1/RxCx .
Виходячи зі схем заміщення конденсаторів в табл.3.1 наведено повні опори плеч мостів для вимірювання ідеальної ємності та ємності конденсаторів з малими і великими втратами.
Таблиця 3.1 – Повні опори плеч мостових схем
Назва моста |
Плечі моста |
|||
|
|
|
|
|
Ідеальна ємність |
|
|
|
|
З малими втратами |
|
|
|
|
З великими втратами |
|
|
|
|
На прикладі моста для вимірювання ємності з малими втратами наведемо загальну методику виведення умови рівноваги для мостів змінного струму.
1. Введемо такі позначення:
![]() (3.34)
(3.34)
2. Використавши позначення (3.34) запишемо умову рівноваги для даного моста
![]() .
(3.35)
.
(3.35)
3. Отримаємо залежності для повних опорів кожного із позначених плечей моста
Zx =Rx + 1/jCx; Z2 =R2; Z3 =R3 + 1/jC3; Z4 =R4. (3.36)
4. Підставимо (3.36) в (3.35) і матимемо:
![]() .
(3.37)
.
(3.37)
5. Розкриємо дужки в (3.37):
![]() .
(3.38)
.
(3.38)
Рівність (3.38) є рівністю двох комплексних чисел. А два комплексних числа будуть рівні тоді, коли рівні їх дійсні і уявні частини.
6. Прирівняємо дійсні частини (3.38)
![]() (3.39)
(3.39)
і знайдемо
![]() .
(3.40)
.
(3.40)
Оскільки Rx порівнюється з R3 у співвідношенні , то резистор R3 має бути змінним (регульованим).
7. Прирівняємо уявні частини (3.38)
![]() (3.41)
(3.41)
і знайдемо
![]() .
(3.42)
.
(3.42)
Для зрівноваження моста конденсатор С3 має бути конденсатором змінної ємності.
8. Знаходимо тангенс кута втрат
tg = RxCx = R3C3. (3.43)
Застосувавши наведену методику і формули (табл.3.1) для повних опорів мостів для вимірювання ємності конденсатора в табл.3.2 наведено кінцеві вирази для визначення Rx і Cx .
Міст з послідовною схемою заміщення застосовується для вимірювання параметрів конденсаторів з малими втратами, з паралельною схемою – для конденсаторів з великими втратами.
Таблиця 3.2 – Аналітичні залежності
Назва моста |
Rx |
Cx |
tg |
Ідеальна ємність
|
- |
|
- |
З малими втратами
|
|
|
tg = R3C3 |
З великими втратами |
|
|
tg = 1/R3C3 |
Електричний кабель, наприклад, одножильний, складається із жили, яка розташовується по осі кабеля, та металевої оболонки. Між жилою та оболонкою знаходиться діелектрик. Жила та оболонка кабеля, таким чином, являють собою конденсатор. Випробування кабеля проводяться при напрузі, під якою він знаходиться під час експлуатації. При випробуваннях визначають ємність кабеля та tg (які потім перераховують на одиницю довжини). В процесі випробувань високовольтних кабелів на вимірювальний міст доводиться подавати високу напругу. Для цього випадку призначена схема моста на рис.3.20, яка забезпечує не тільки вимірювання параметрів кабелю, а й безпеку роботи.
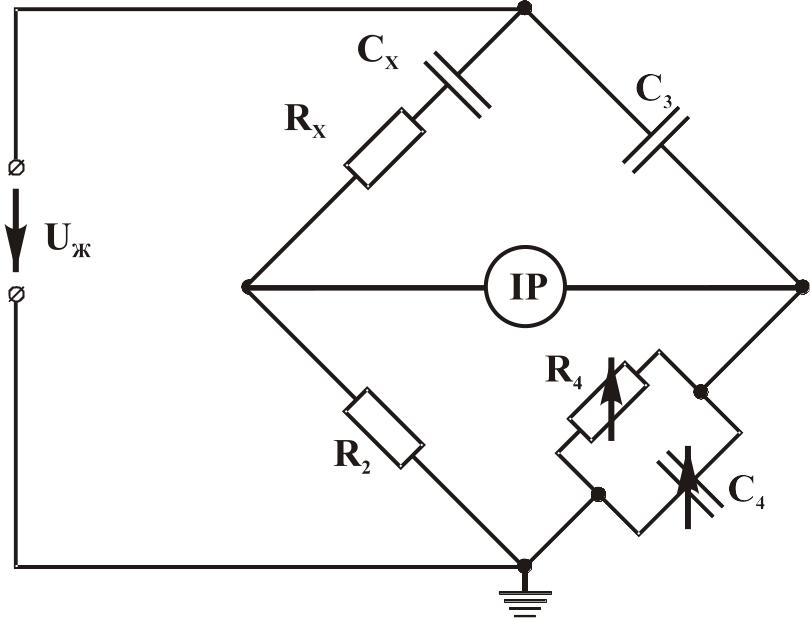
Рисунок 3.20
Параметри елементів моста підбираються так, щоб основна частина високої напруги припадала на верхні елементи схеми (Cx–Rx, C3), а регульовані оператором елементи C4 та R4 були під низькою напругою. Ці елементи заземлюють.
Виходячи з наведеної раніше методики отримано формули, за якими обчислюються шукані параметри:
Rx = R2(C4/C3);
Cx = C3(R4/R2); (3.44)
tg = RxCx = R4C4.