

5.3. Вимірювання різниці магнітних потенціалів
Різницю магнітних потенціалів (магнітну напругу) між точками a та b магнітного поля (рис.5.7) можна виміряти за допомогою потенціалометричної котушки (гнучкого магнітного пояса).
Рисунок 5.7
Потенціалометрична котушка являє собою обмотку, яка складається з парного числа шарів і намотана на гнучкому каркасі з ізоляційного матеріалу. Виводи від обмотки являють собою гнучкі скручені провідники. Розташовані виводи на середині магнітного пояса. За допомогою цих виводів потенціалометр приєднується до балістичного гальванометра.
Потокозчеплення з потенціалометричною котушкою, кінці якої знаходяться в точках a та b, визначається виразом:
=
![]() ,
(5.9)
,
(5.9)
де S – площина, охоплена середнім витком котушки; l – довжина котушки; Bl – проекція вектора на направлення dl; K = WкS/l – постійна котушки (магнітного пояса). Значення інтеграла від Hl по dl не залежить від шляху інтегрування. Воно визначається тільки розташуванням точок a та b.
Різниця магнітних потенціалів між точками a та b, тобто магнітна напруга
Umab
=![]() .
(5.10)
.
(5.10)
Із зіставлення (5.9) та (5.10) видно, що
Umab
=![]() .
(5.11)
.
(5.11)
Для вимірювання Umab пояс розташовують так, щоб його кінці знаходились в точках a та b. Потім за допомогою балістичного гальванометра вимірюють , вилучаючи котушку з поля, або відключають струм, який створює поле, і помічають максимальний “відкид” гальванометра.
Постійну потенціалометричної котушки визначають експериментально, для чого використовують поле з відомою напруженістю.
За допомогою потенціалометричної котушки можна виміряти різницю потенціалів як в однорідних, так і в неоднорідних магнітних полях.
5.4. Вимірювання характеристик постійних магнітних полів веберметром
В практиці магнітних вимірювань застосовуються магнітоелектричні, фотокомпенсаційні та електронні веберметри. В усіх цих приладах використовується як перетворювач вимірювальна котушка.
Розглянемо магнітоелектричний веберметр.
Магнітоелектричний веберметр (рис.5.8) являє собою чутливий магнітоелектричний механізм без протидійного моменту (WПТ = 0), до якого через безмоментні струмопідводи приєднується вимірювальна котушка з числом витків Wк. У зв’язку з тим, що опір кола механізму разом з вимірювальною котушкою малий, механізм працює в аперіодичному режимі з великим ступенем заспокоєння. При цьому коефіцієнт індукційного заспокоєння багато більший за коефіцієнт повітряного заспокоєння. Оскільки Pі>>Pп, вважаємо, що результувальний коефіцієнт заспокоєння P Pі. При WПТ = 0 рівняння руху рухомої частини буде мати вигляд:
J = 0i. (5.12)
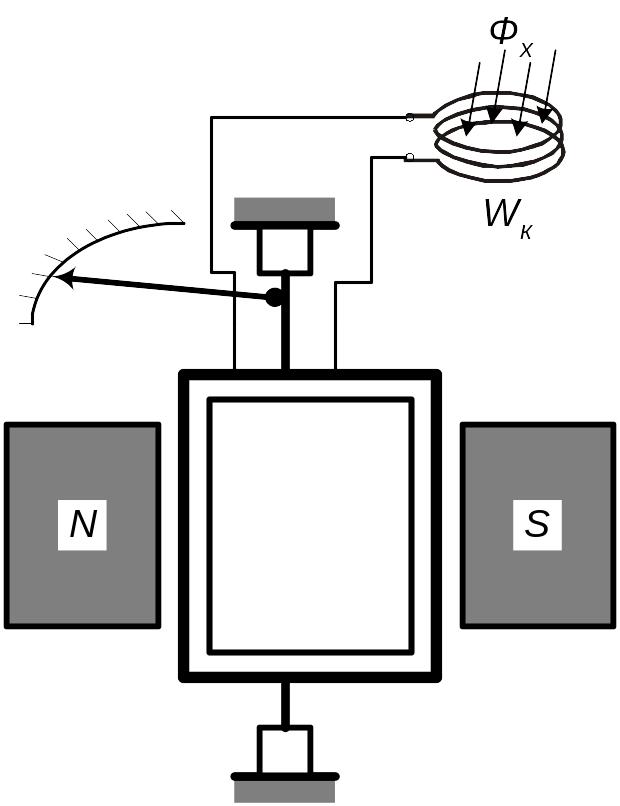
Рисунок 5.8
В подальшому будемо вважати, що вимірюваний магнітний потік Фх змінюється від Фх до нуля або від нуля до Фх. В будь-якому випадку зміна потоку Фх = Фх. При зміні потоку у вимірювальній котушці виникає е.р.с. e = –Wk . Вона врівноважується напругами на елементах кола: e = iR + L , звідки маємо
i
=
![]() ,
(5.13)
,
(5.13)
де R = Rк + Rр – активний опір кола, Rк – опір вимірювальної котушки, Rр – опір рамки механізму веберметра, L – індуктивність вимірювального кола.
Підставимо (5.13) в (5.12):
J![]() .
(5.14)
.
(5.14)
Позначимо t = 0 – момент часу, який безпосередньо передує зміні потоку Фх; t = t1 – момент часу, що настає відразу за закінченням зміни потоку Фх. Будемо мати на увазі, що струм i в колі існує тільки тоді, коли e 0, тобто має місце зміна потоку Фх, а рухома частина механізму переміщається (при великому моменті індукційного заспокоєння) тільки тоді, коли i 0. Проінтегруємо (5.14) від t = 0 до t1:
J .
.
Одержимо:
J![]() .
(5.15)
.
(5.15)
У
(5.15)
![]() =
0, оскільки рухома частина ще не рухається;
=
0, оскільки рухома частина ще не рухається;
![]() =
0, бо рухома частина вже не рухається.
Тому перша складова J
=
0, бо рухома частина вже не рухається.
Тому перша складова J![]() =
0.
=
0.
Позначимо положення рамки (і, таким чином, стрілки на шкалі приладу) в момент t = t1 кутом 2. Тоді друга складова у лівій частині рівності дає нам P(2 – 1) = P, де – зміна показів веберметра.
Остання складова в (5.15) дорівнює нулю, оскільки i(0) = 0 і i(t1) = 0. В результаті одержуємо:
P
=
 .
(5.16)
.
(5.16)
Підставимо в (5.16) e = –Wk :
P
= – ,
(5.16,а)
,
(5.16,а)
звідки (без урахування знака мінус)
Фx
= Фx
=![]()
= CФ,
(5.17)
= CФ,
(5.17)
де CФ
= (RP)/(Wk0)
– постійна (ціна поділки) веберметра.
З рівняння (2.22) виходить, що коефіцієнт
індукційного заспокоєння Pi = ![]() /R.
Тоді
/R.
Тоді
CФ
=![]() .
(5.18)
.
(5.18)
Останнє співвідношення показує, що постійна веберметра не залежить від опору кола. Але цей вираз для CФ одержаний при допущенні Pi>>Pп, тобто коли опір кола малий. При великих опорах Pп стає порівнянним з Pi, і постійна веберметра збільшується. Тому після експериментального визначення CФ за допомогою зразкової котушки взаємної індуктивності цю котушку з кола веберметра не виключають, залишаючи її ввімкненою послідовно (вторинною обмоткою) з вимірювальною котушкою. Тоді опір кола під час вимірювань веберметром залишається таким самим, яким він був під час визначення CФ.
У зв’язку з відсутністю механічного протидійного моменту вказівник веберметра займає довільне положення. Для встановлення вказівника в потрібне положення у веберметрі передбачений електромеханічний коректор, який являє собою допоміжний магнітоелектричний механізм.
До недоліків магнітоелектричного веберметра слід віднести невисоку чутливість та велику похибку (13% і більше в залежності від опору зовнішнього кола).