

Контрольні питання
Квантування і дискретизація. Похибки цифрових вимірювальних приладів.
Класифікація цифрових вимірювальних приладів.
Цифровий частотомір середніх значень: структурна схема, часові діаграми і принцип дії.
Виведіть рівняння перетворення і похибки квантування для частотоміра. Наведіть аналітичні залежності для верхньої і нижньої меж вимірювання.
Цифровий частотомір миттєвих значень: структурна схема, часові діаграми і принцип дії.
Виведіть рівняння перетворення і похибки квантування для періодоміра. Наведіть аналітичні залежності для верхньої і нижньої меж вимірювання.
Цифровий фазометр миттєвих значень: структурна схема, часові діаграми і принцип дії.
Виведіть рівняння перетворення і похибки квантування для фазометра.
Цифровий вольтметр час-імпульсного перетворення: структурна схема, часові діаграми і принцип дії.
Виведіть рівняння перетворення і похибки квантування для вольтметра час-імпульсного перетворення.
Цифровий вольтметр послідовного наближення: структурна схема, часові діаграми і принцип дії.
Виведіть рівняння перетворення і похибки квантування для вольтметра послідовного наближення.
Цифровий слідкувальний вольтметр: структурна схема і принцип дії.
Часові діаграми роботи слідкувального вольтметра.
Розділ V ВИМІРЮВАННЯ МАГНІТНИХ ВЕЛИЧИН
Магнітні вимірювання виконуються з метою дослідження характеристик магнітних полів, матеріалів та готових виробів. Широке застосування магнітні вимірювання знаходять в магнітній дефектоскопії, в контролі за роботою установок атомної та ядерної фізики, при визначенні характеристик електромагнітних полів високовольтних ліній електропередач та ін.
Основними
величинами, які визначають магнітне
поле, є напруженість H, індукція B та
магнітний потік Ф. Магнітні матеріали
характеризуються залежностями B(H),
залежністю магнітної проникності від
напруженості (H)
та ін. Зв’язок між магнітними величинами
визначається співвідношеннями:
![]() ,
Ф =
,
Ф =![]() .
Рисочки над літерами позначають векторні
величини.
.
Рисочки над літерами позначають векторні
величини.
Для вимірювання магнітних величин електричними методами їх необхідно спочатку перетворити в електричні величини. Для цього застосовуються перетворювачі магнітних величин в електричні.
5.1. Вимірювальні перетворювачі магнітних величин
Індукційні перетворювачі. Дія індукційного перетворювача основана на явищі електромагнітної індукції. За допомогою індукційних перетворювачів можна визначити характеристики як постійних, так і змінних магнітних полів.
|
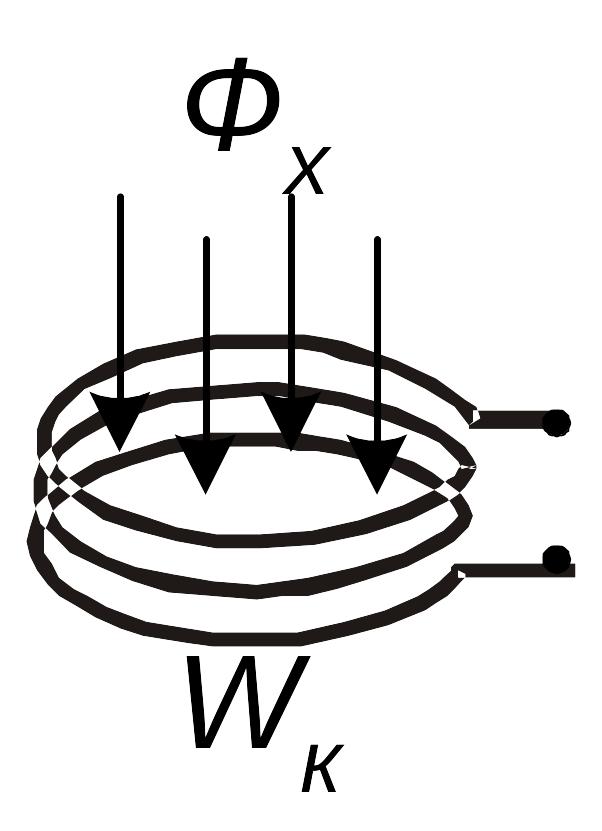 айбільш
поширеним видом індукційного перетворювача
є вимірювальна котушка Wк,
яка поміщається в вимірювальне поле
(рис. 5.1). Потім будь-яким способом
здійснюється зміна магнітного потоку
Фx, який
проходить через площину S, охоплену
витками вимірювальної котушки. В котушці
при цьому індукується е.р.с. e =
–Wк(dФx/dt).
айбільш
поширеним видом індукційного перетворювача
є вимірювальна котушка Wк,
яка поміщається в вимірювальне поле
(рис. 5.1). Потім будь-яким способом
здійснюється зміна магнітного потоку
Фx, який
проходить через площину S, охоплену
витками вимірювальної котушки. В котушці
при цьому індукується е.р.с. e =
–Wк(dФx/dt).
Рисунок 5.1
Отже, відбувається перетворення магнітної величини в електричну – е.р.с. e. Потім здійснюється обробка е.р.с. або струму, що наводиться в колі котушки цієї е.р.с., в результаті якої визначається Фx та пов’язані з Фx магнітні величини.
Якщо потік, що перетинає вимірювальну котушку, постійний, то його можна змінювати різними способами: внести котушку в поле, вилучити її з поля, повернути її на певний кут, увімкнути або вимкнути струм, який створює поле (коли воно створюється за допомогою котушок або електромагнітів). Таку котушку називають індукційно-імпульсним перетворювачем. Існують також обертові та вібраційні вимірювальні котушки для вимірювання характеристик постійних магнітних полів.
Потік Фx може бути змінним у часі; у цьому випадку немає необхідності здійснювати які-небудь маніпуляції з вимірювальною котушкою.
Гальваномагнітні перетворювачі. В гальваномагнітних перетворювачах використовуються ефекти, що виникають у напівпровідниках або металах, які знаходяться в магнітному полі. Найбільш широко для магнітних вимірювань використовуються ефект Холла та ефект Гаусса.
Е
Рисунок
5.2
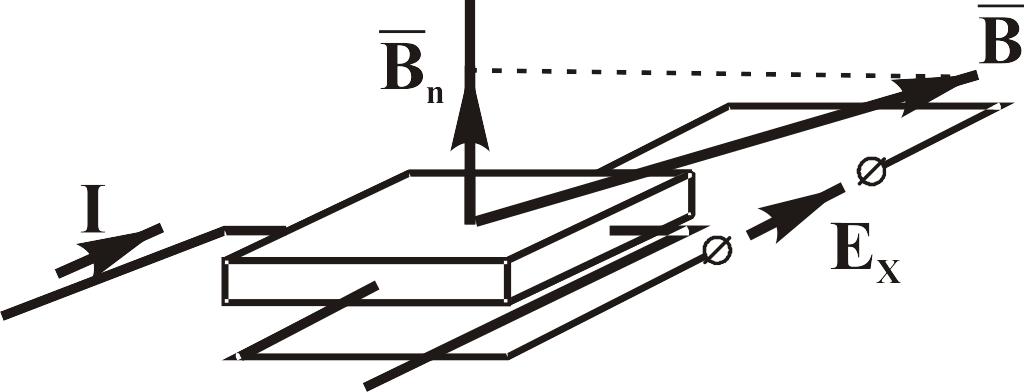
Різниця потенціалів, яка виникає між гранями пластини, називається е.р.с. Холла Ex. Вона пов’язана з вимірюваною магнітною індукцією співвідношенням:
Ex = RxIBn / n, (5.1)
де Rx – постійна Холла, яка залежить від властивостей матеріалу пластини; I – струм, Bn – нормальна до пластини складова вектора магнітної індукції; n – товщина пластини.
Як
видно із співвідношення (5.1), е.р.с. Холла
залежить від кута нахилу вектора
![]() до поверхні пластини. Повертаючи
пластину, за максимумом е.р.с. можна
визначити напрям вектора індукції
до поверхні пластини. Повертаючи
пластину, за максимумом е.р.с. можна
визначити напрям вектора індукції
![]() .
.
Пластина перетворювача Холла має малі розміри (максимальний з розмірів 1–1,5 мм), тому за допомогою цього перетворювача можна вимірювати індукцію в малих проміжках.
Матеріалами для виготовлення перетворювачів Холла служать германій, кремній, арсенід галію, сурм’янистий індій та ін.
Перетворювачі Холла застосовуються для вимірювання як постійних, так і змінних магнітних полів у широкому діапазоні частот. Похибка перетворення складає 1–3%. Недоліками перетворювача Холла є невисока чутливість та сильна залежність постійної Холла від температури.
Ефект Гаусса полягає у зміні опору деяких матеріалів при внесенні їх у магнітне поле. Перетворювачі, які використовують цей ефект, називаються магніторезистивними. Для їх виготовлення використовують вісмут, сурм’янистий індій, сурм’янистий нікель та інші матеріали.
Відносна зміна опору матеріалу під дією магнітної індукції
R / R0 = AuнзB2, (5.2)
де R0 – опір при B = 0; A – коефіцієнт, який залежить від форми і розмірів перетворювача та властивостей матеріалу; uнз – рухливість носіїв заряду.
Найбільшу відносну зміну дає перетворювач, який має форму диска з електродом в центрі та електродом у вигляді обода на диску (диск Корбіно).
Знаходять застосування перетворювачі у вигляді спіралі, прямокутної форми та у вигляді меандру. Перевагою останнього є високий омічний опір. Недоліком магніторезистивних перетворювачів, як і перетворювачів Холла, є сильна залежність від температури.
Магніторезистивні перетворювачі звичайно вмикаються в чотириплечі мости.
Гальваномагніторекомбінаційні перетворювачі (ГМРП) основані на зміні середньої концентрації носіїв заряду під дією магнітного поля, що проявляється у провідниках, які мають поверхні з різною швидкістю рекомбінації носіїв заряду. ГМРП звичайно представляють собою тонку напівпровідникову пластину (рис. 5.3), у якої одна з бокових поверхонь (1) оброблена грубо, а інша (2) – відполірована. Внаслідок цього біля поверхні 1 швидкість рекомбінації носіїв зарядів на 2–3 порядки більша, ніж біля поверхні 2.
П
Рисунок 5.3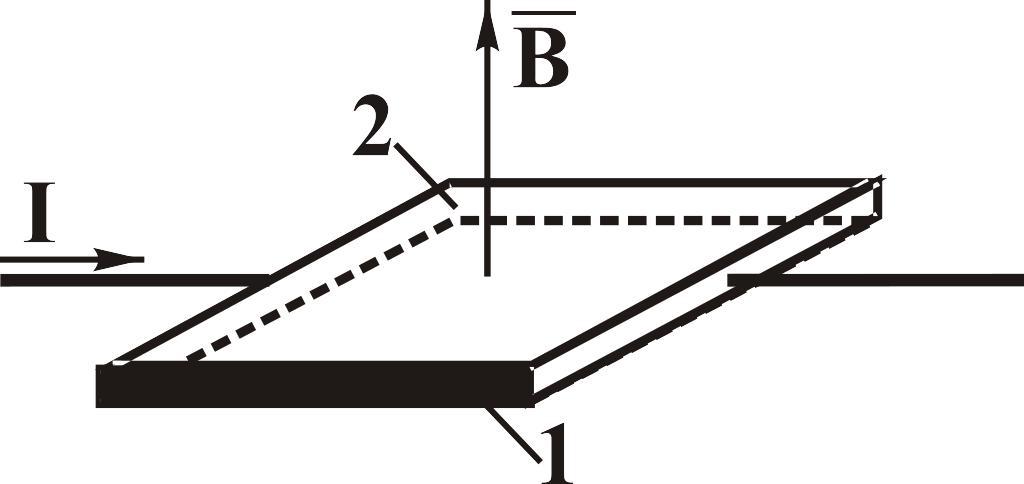
Чутливість до магнітної індукції ГМРП SB = Uвих / B на 2–3 порядки більша за чутливість перетворювачів Холла.
Феромодуляційні перетворювачі (ферозонди) являють собою у найпростішому випадку систему із двох однакових стержневих магнітопроводів, виконаних з матеріалів з високою магнітною проникністю (пермалою), з нанесеними на кожний з них двома обмотками (рис.5.4), причому W1 = W2, W3 = W4.
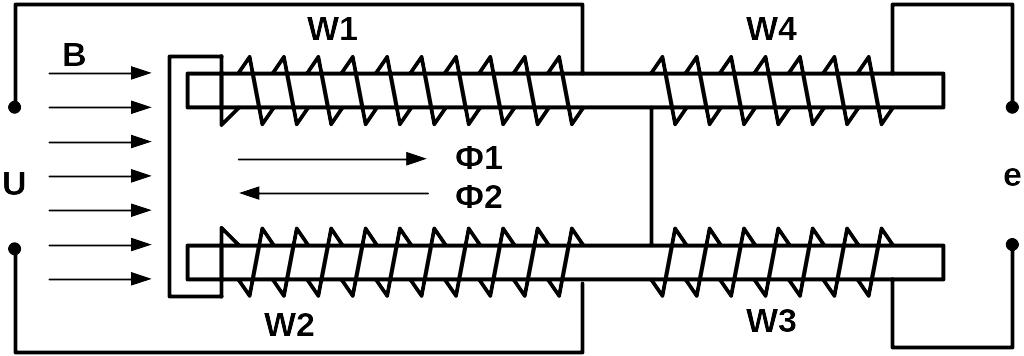
Рисунок 5.4
Обмотки W1 та W2 називаються обмотками збудження. Вони з’єднані таким чином, що створювані ними магнітні потоки направлені назустріч один одному. У відсутності зовнішнього магнітного поля при синусоїдному намагнічувальному струмі потоки в магнітопроводах несинусоїдні через нелінійність характеристики B(H) матеріалу осердь, але симетричні відносно осі часу. Е.р.с., що наводяться потоками у вимірюваних обмотках W3 та W4, будуть рівні, хоча вони також несинусоїдні, але симетричні відносно осі часу. Результувальна е.р.с. при зустрічному включенні обмоток W3 та W4 дорівнює нулю.
В результаті у вимірювальних обмотках W3 та W4 наведуться несинусоїдні та несиметричні відносно осі часу е.р.с. e3 та e4; при цьому непарні гармоніки будуть збігатися за фазою, а парні будуть у протифазі. Оскільки обмотки W3 та W4 з’єднані послідовно назустріч одна одній, то результувальна е.р.с. містить тільки суму парних гармонік, з якої за допомогою фільтра виділяють другу. Вона й несе інформацію про вимірювану індукцію магнітного поля.
Феромодуляційні перетворювачі придатні для вимірювань як постійних, так і змінних магнітних полів. Прилади з цими перетворювачами найбільш чутливі. Їх похибка 1–2%.
Ядерні перетворювачі магнітної індукції відносяться до групи квантових перетворювачів, робота яких основана на взаємодії мікрочастинок з магнітним полем, такими мікрочастинками, зокрема, є ядра атомів речовини, яка має момент кількості руху (спін та магнітний момент). Відношення магнітного моменту мікрочастинки до її механічного моменту називають гіромагнітним відношенням і позначають .
В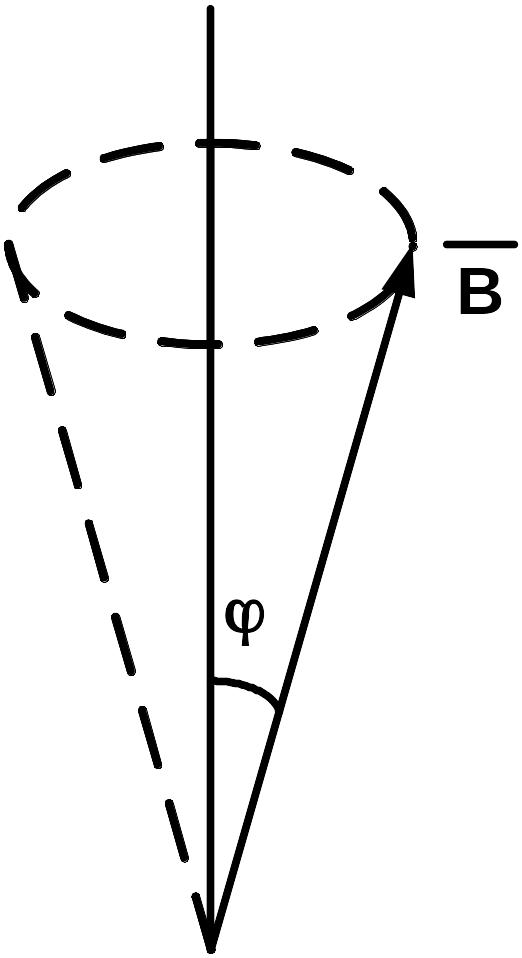 ідомо,
що магнітні моменти ядер речовини,
внесеної в постійне магнітне поле,
орієнтуються в напрямку цього поля. При
зміні напряму зовнішнього поля
результувальний ядерний магнітний
момент Мм
починає прецесувати відносно нового
напряму вектора магнітної індукції
(рис.5.5), тобто вектор Мм
буде обертатись з частотою = B
відносно вектора магнітної індукції,
створюючи конус з кутом
при вершині. З часом процес затухає, при
цьому кут прецесії
прямує до нуля, а речовина набуває
стаціонарної намагніченості, вектор
якої збігається з новим напрямом вектора
магнітної індукції зовнішнього поля.
ідомо,
що магнітні моменти ядер речовини,
внесеної в постійне магнітне поле,
орієнтуються в напрямку цього поля. При
зміні напряму зовнішнього поля
результувальний ядерний магнітний
момент Мм
починає прецесувати відносно нового
напряму вектора магнітної індукції
(рис.5.5), тобто вектор Мм
буде обертатись з частотою = B
відносно вектора магнітної індукції,
створюючи конус з кутом
при вершині. З часом процес затухає, при
цьому кут прецесії
прямує до нуля, а речовина набуває
стаціонарної намагніченості, вектор
якої збігається з новим напрямом вектора
магнітної індукції зовнішнього поля.