

7.10 Мікропроцесорний вимірювач кутової швидкості
Розглянемо основні принципи побудови мікропроцесорного засобу вимірювання кутової швидкості електричних машин із використанням фотоелектричного сенсора кутової швидкості. Його структурна схема представлена на рис.7.16.
Сенсор кутової
швидкості перетворює змінну кутову
швидкість
![]() у частоту слідування електричних
імпульсів
у частоту слідування електричних
імпульсів
![]() .
.
Визначимо нижню межу вимірювання цифрового тахометра миттєвих значень (періодоміра), рівняння перетворення якого має вигляд:
![]() , (7.9)
, (7.9)
де z – кількість міток в фотоелектричному сенсорі кутової швидкості.
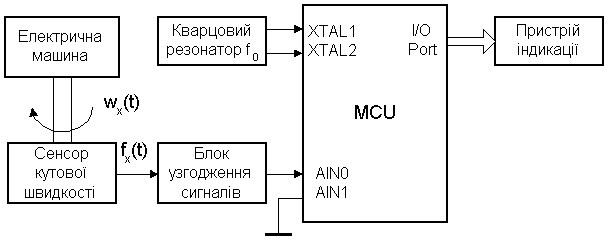
Рисунок 7.16
Похибка квантування
![]() , (7.10)
, (7.10)
де - частота імпульсів квантування; z – роздільна здатність сенсора кутової швидкості.
Максимальна ємність бінарного лічильника мікроконтролера
![]() , (7.11)
, (7.11)
де n – розрядність лічильника.
Враховуючи (7.11), рівняння (7.9) запишемо так
![]() . (7.12)
. (7.12)
Тоді з рівняння (7.12) визначимо нижню межу вимірювання
![]() . (7.13)
. (7.13)
Верхня межа вимірювання
![]() для тахометра миттєвих значень
визначається із рівняння похибки
квантування (7.10):
для тахометра миттєвих значень
визначається із рівняння похибки
квантування (7.10):
![]() , (7.14)
, (7.14)
де
![]() - нормоване значення похибки квантування
(7.10).
- нормоване значення похибки квантування
(7.10).
Задаючись величиною
![]() ,
отримаємо
,
отримаємо
![]() .
.
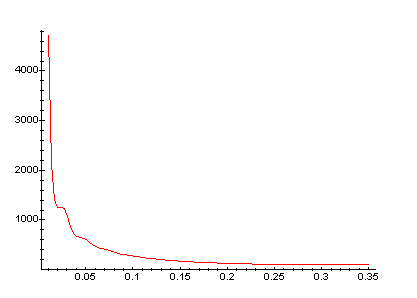
На рис.7.17 представлено
розраховану залежність
![]() в режимі пуску електричної машини, а на
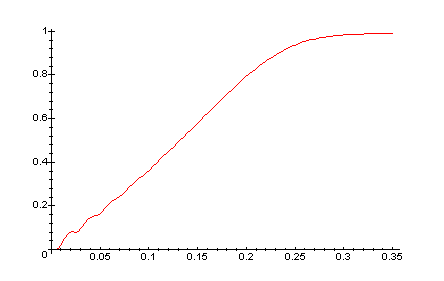
рис.7.18 – похибку квантування
в режимі пуску електричної машини, а на
рис.7.18 – похибку квантування
![]() .
.
t
![]()
Рисунок 7.17
З рисунка 7.18 видно, що значення похибки квантування при =5 МГц та z=1000 не перевищує 1%.
t
![]()
Рисунок 7.18
Таким чином, для вимірювання кутової швидкості як в перехідних режимах роботи електричної машини, так і в статичному режимі можна використовувати частотомір миттєвих значень. Алгоритм роботи мікропроцесорного вимірювача кутової швидкості представлений на рис.7.19. Рівняння перетворення мікропроцесорного вимірювача кутової швидкості має вигляд:
![]() . (7.15)
. (7.15)
Рисунок 7.19
7.11 Мікропроцесорний вимірювач ковзання
Ковзання
![]() в асинхронній електричній машині
характеризує відставання частоти поля
статора
в асинхронній електричній машині
характеризує відставання частоти поля
статора
![]() від частоти поля ротора
від частоти поля ротора
![]() :
:
![]() . (7.16)
. (7.16)
S є досить важливим параметром, який значною мірою визначає якість електричної машини.
Як видно з формули (7.16), для визначення ковзання необхідно проводити вимірювання двох складових: частоти поля статора і частоти поля ротора .
На
рис.7.20 наведено структурну схему
мікропроцесорного вимірювача ковзання,
яка складається з двох вимірювальних
каналів – вимірювального каналу кутової
швидкості
і вимірювального каналу частоти мережі
живлення
![]() .
Їх основні принципи побудови розглянуті
у п. 7.10 і п. 7.6 відповідно.
.
Їх основні принципи побудови розглянуті
у п. 7.10 і п. 7.6 відповідно.
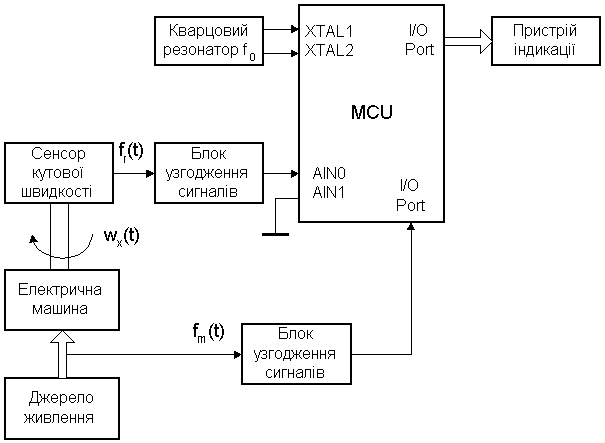
Рисунок 7.20
Рівняння перетворення вимірювальних каналів кутової швидкості і частоти мережі живлення матимуть вигляд:
![]() ; (7.17)
; (7.17)
![]() , (7.18)
, (7.18)
де
![]() - коефіцієнти подільника частоти у
вимірювальних каналах частоти мережі
та кутової швидкості відповідно;
- коефіцієнти подільника частоти у
вимірювальних каналах частоти мережі
та кутової швидкості відповідно;
![]() - кількість імпульсів у вимірювальних
каналах частоти мережі та кутової
швидкості відповідно.
- кількість імпульсів у вимірювальних
каналах частоти мережі та кутової
швидкості відповідно.
Враховуючи,
що
![]() ,
із рівнянь (7.16) – (7.18) отримаємо рівняння
перетворення мікропроцесорного
вимірювача ковзання:
,
із рівнянь (7.16) – (7.18) отримаємо рівняння
перетворення мікропроцесорного
вимірювача ковзання:
![]() . (7.19)
. (7.19)
Алгоритм роботи мікропроцесорного вимірювача ковзання наведений на рис.7.21.
Рисунок 7.21