

Перетворювач для вимірювання слабких магнітних полів на основі ядерного магнітного резонансу має ампулу з робочою речовиною, яка розташована всередині котушки індуктивності.
Рисунок 5.5
При
пропусканні струму через котушку
індуктивності створюється попередня
поляризація (тобто створюється початкова
намагніченість) в напрямі вектора
![]() ,
який перпендикулярний до вектора
індукції
вимірюваного поля. Потім струм відмикають
і вимірюють частоту е.р.с., що наводиться
в котушці за рахунок прецесії.
,
який перпендикулярний до вектора
індукції
вимірюваного поля. Потім струм відмикають
і вимірюють частоту е.р.с., що наводиться
в котушці за рахунок прецесії.
Точність вимірювань магнітної індукції за допомогою приладів, які використовують ядерний магнітний резонанс, може бути досягнута досить велика (0,001%), оскільки гіромагнітне відношення та частота прецесії можуть бути визначені дуже точно, тому такі прилади використовують дуже часто для повірки інших приладів з більш низькими класами точності.
Недоліком приладів на основі ядерного магнітного резонансу є неможливість їх застосування для вимірювань в неоднорідних магнітних полях.
5.2. Вимірювання характеристик постійних магнітних полів
Балістичний магнітоелектричний гальванометр відрізняється від звичайних збільшеним моментом інерції рухомої частини. Для магнітних вимірювань балістичний гальванометр використовується разом з вимірюваною котушкою (рис.5.6, а). При різкій зміні потоку Фx у вимірювальній котушці наводиться імпульс струму тривалістю i (рис.5.6, б). Рухома частина гальванометра приходить в коливальний рух з періодом коливань T0, який значно перевищує i: T0 = (2030)i .
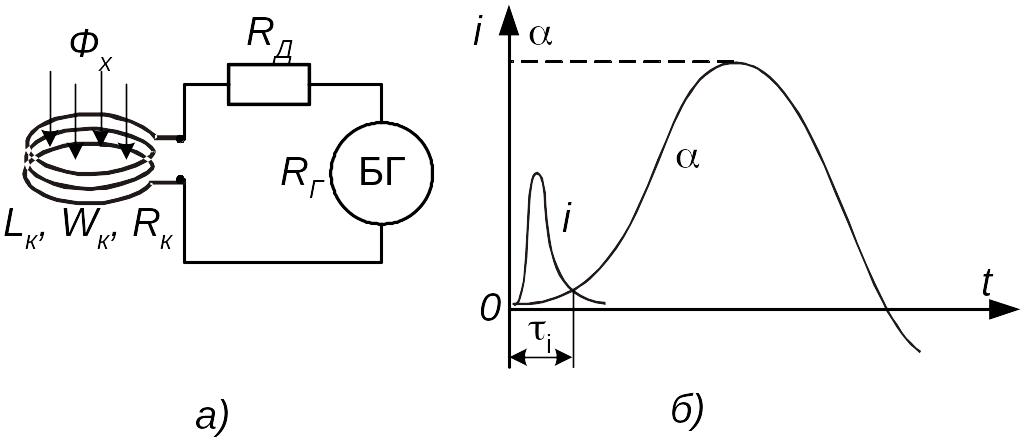
Рисунок 5.6
В момент часу t = i відхилення рухомої частини від положення рівноваги, в якому вона знаходилась до появи імпульсу, практично дорівнює нулю.
Приблизно те саме можна сказати про пройдений артилерійським снарядом шлях в момент його вильоту із ствола у порівнянні з дальністю його польоту. Рух артилерійського снаряда описується балістикою, тому гальванометр, рух рухомої частини якого подібний рухові снаряда, називається балістичним.
Рівняння руху рухомої частини гальванометра було одержано нами раніше (2.19). Воно має вигляд:
J![]() +
WПТ
= 0i.
(5.3)
+
WПТ
= 0i.
(5.3)
Розв’язуючи, тобто інтегруючи це рівняння при допущенні (у першому наближенні) P = 0 та умовах i(0) = 0; i/t = i = 0; (0) = 0; /t = i = 0, одержимо, що рух рухомої частини буде описуватись рівнянням:
=
![]() (sint)Q,
(5.4)
(sint)Q,
(5.4)
де =![]() –
частота коливань рухомої частини, Q –
кількість електрики в імпульсі струму.
–
частота коливань рухомої частини, Q –
кількість електрики в імпульсі струму.
Таким чином, амплітуда коливань рухомої частини виявляється пропорційною кількості електрики Q в імпульсі струму. У відповідності з рівнянням (5.4) коливання рухомої частини незгасальні, оскільки було прий- нято P = 0. При P 0 та (P/2J)2 < (WПТ/J) рух носить коливальний згасальний характер. Але амплітуда першого коливання (першого “відкиду”) m1 залишається пропорційною кількості електрики в імпульсі:
m1 = SQQ, (5.5)
де SQ – чутливість гальванометра до кількості електрики.
Як
уже відмічалось вище, наведена у
вимірювальній котушці е.р.с. пов’язана
з вимірюваним потоком співвідношенням:
e = –Wk![]() .
Вона врівноважується напругами на
активних опорах та індуктивності кола:
.
Вона врівноважується напругами на
активних опорах та індуктивності кола:
e
= –Wk
=
iR
+ L![]() ,
(5.6)
,
(5.6)
де R = Rк + Rг + Rд – активний опір кола; Rк – опір вимірювальної котушки; Rг – опір рамки гальванометра; Rд – додатковий опір, який служить для встановлення коливального режиму руху рухомої частини та певної чутливості гальванометра; L – індуктивність вимірювального кола.
Інтегруючи (5.6) у межах від 0 до t = i при початкових умовах Ф(0) = Фх; Ф/t = i = 0; i(0) = 0; i/t = i = 0 та вважаючи L постійною величиною, одержуємо Фх = (R/Wк)Q, звідки
Q = (Wк/R)Фх. (5.7)
Підставивши (5.7) в (5.5), одержуємо:
m1 = SQ(Wк/R)Фх,
звідки
Фх = (R/Wк)Q
або
Фх = (CФ/Wк)m1, (5.8)
де CФ = R/SQ – постійна (ціна поділки) гальванометра за магнітним потоком. CФ залежить від опору R, тому її визначають експериментально за допомогою зразкової котушки індуктивності.
Якщо магнітне поле, в якому знаходиться вимірювальна котушка, однорідне, а площина її витків перпендикулярна силовим лініям, то індукцію та напруженість можна знайти із співвідношення: Bx = Фx/Sк, Hx = Bx/a, де Sк – площина, охоплена середнім витком вимірювальної котушки, a – абсолютна магнітна проникність середовища.