

§ 5. Оценка качества процессов регулирования в установившихся режимах
Статические и астатические системы.
В САР могут быть звенья, у которых нет установившихся соотношений между входными и выходными величинами. Такие звенья не имеют статической характеристики и называются астатическими(интегрирующее звено). При этом следует отметить, что в астатических звеньях в установившихся режимах существуют однозначные зависимости производных выходной величины от различных постоянных значений входной величины. Как было показано ПФ-я остаточной системы может быть представлена в виде:
![]() (1)
(1)
![]() -
порядок астатизма,
-
порядок астатизма,
![]() - ПФ статической части системы(без
интегрирующих звеньев). При
- ПФ статической части системы(без
интегрирующих звеньев). При
![]() (система является статической), иногда
говорят, что она обладает астатизмом
«0»- го порядка. Рассмотрим САР, состоящую
из ОР с ПФ
(система является статической), иногда
говорят, что она обладает астатизмом
«0»- го порядка. Рассмотрим САР, состоящую
из ОР с ПФ
![]() и регулятора с ПФ
и регулятора с ПФ
![]() (рис. 16)
(рис. 16)

Рисунок 16
![]() ;
(*)
;
(*)
ОР и регуляторы, которые могут быть представлены в виде астатического звена или соединения, называются астатическими, иные они называются статическими. Иногда астатические объекты называются объектами без самовыравнивания, статические – с самовыравниванием. Физически эти названия объясняются тем, что в астатических объектах при поступлении на их входы постоянного по величине воздействия значение регулируемой(выходной) величины теоретически возрастает до бесконечности (интегрирующего звена ). В статических объектах при аналогичном условии выходная величина увеличивается только до некоторого постоянного значения, т.е. происходит стабилизация(самовыравнивание) выходной величины на новом уровне, который осуществляется самим объектом даже при отсутствии регулятора (апериодическое звено 1-го порядка). Так как САР имеет различные структурные схемы относительно задающего и возмущающих воздействий, то с точки зрения статизма и астатизма их необходимо оценивать относительно этих воздействий раздельно.
В установившихся режимах оценка качества регулирования проводится по величине установившейся ошибки (*).Чем меньше ошибка, тем выше качество системы при влиянии на систему задающего и возмущающего воздействий:
![]() ,
(2)
,
(2)
где
![]() и
и
![]() .
.
В соответствии с (1) ПФ объекта и регулятора:
![]()
![]()
где e,k
– порядки астатизма объекта и регулятора;
![]() ,
,![]() - ПФ статической части объекта и
регулятора. Тогда
ПФ замкнутой системы по ошибке:
- ПФ статической части объекта и
регулятора. Тогда
ПФ замкнутой системы по ошибке:
![]() ,
,
где
-
порядок астатизма системы;
![]() .
.
ПФ замкнутой системы по возмущению:

Определение установившихся ошибок при различных воздействий:
А) оба воздействия являются ступенчатыми функциями.
![]() ,
,
![]() ,
,![]() ;
;
![]() ,
,![]() ,
,![]() ;
;
Установившаяся ошибка возникающая при этих воздействиях называют статической ошибкой, то есть
![]()
В этом случае согласно формуле (2):
![]() ;
;
![]() .
.
Следовательно,
установившаяся ошибка вызвана тем или
иным воздействием зависит не только от
величины этого воздействия, но и от
начального значения соотношений ПФ, то
есть при
![]() .
.
Если
![]() ,
то
,
то
![]() и система является астатической по
каналу возмущающего воздействия. Если
и система является астатической по
каналу возмущающего воздействия. Если
![]() ,
то
,
то
![]() система является астатической по каналу
возмущающего воздействия. Если
система является астатической по каналу
возмущающего воздействия. Если
![]() или
или
![]() ,
то система является статической по
соответствующему каналу.
,
то система является статической по
соответствующему каналу.
Рассмотрим следующие 4 случая:
Регулятор астатический (
 )
, объект астатический (
)
, объект астатический ( )
,
,
тогда
)
,
,
тогда
![]() ;
;
![]() ;
;
 ;
;
![]() ,
то есть система является статической
по обоим каналам.
,
то есть система является статической
по обоим каналам.
Регулятор астатический(
 )
,объект статический (
)
,объект статический ( ),
),
 ,тогда
,тогда
![]() ,
;
,
;
 .
.
Система по обоим каналам является астатической.
Регулятор статический (
 ),
объект астатический (
),
объект астатический ( ),
),
 ,
тогда
,
тогда
![]() ,
;
,
;
![]() ;
;
![]() ;
;
![]() ,
где
,
где
![]() ,
,
![]() - коэффициенты передачи объекта и
регулятора.
- коэффициенты передачи объекта и
регулятора.
Таким образом, система является астатической по каналу задающего воздействия и статической по каналу возмущающего воздействия.
Объект и регулятор статические (
 ),
тогда
),
тогда
![]()
![]() ,
,
![]() ;
;
![]() .
.
Составляющая
ошибки
![]() практически всегда может быть сведена
к 0 за счет использования неединичной
ОС. Она равна
нулю в системе автоматической стабилизации,
у которой
практически всегда может быть сведена
к 0 за счет использования неединичной
ОС. Она равна
нулю в системе автоматической стабилизации,
у которой
![]() .
.
Относительное значение установившейся ошибки называется коэффициентом статизма системы по соответствующему каналу.
![]() - коэффициент
статизма системы по задающему воздействию;
- коэффициент
статизма системы по задающему воздействию;
![]() - коэффициент
статизма системы по возмущающему
воздействию.
- коэффициент
статизма системы по возмущающему
воздействию.
Таким образом система с единичной ОС является статической по обоим каналам.
Полученные результаты представляются в виде таблицы.
№ |
Регулятор |
Объект |
|
|
1 |
А |
А |
А |
А |
2 |
А |
С |
А |
А |
3 |
С |
А |
А |
С |
4 |
С |
С |
С |
С |
Выводы:
Если регулятор астатический, то независимо от ОР система по обоим каналам астатическая.
Если регулятор статический, то независимо от ОР система статическая по каналу возмущающего воздействия. Астатизм по каналу задающего воздействия определяется астатизмом объекта.
Б) Задающее воздействие имеет вид линейной функции
![]() ,
где
,
где
![]() -
скорость изменения задающего воздействия
-
скорость изменения задающего воздействия
![]() ,
,
![]() .
.
Преобразуя по Лапласу, имеем:
![]() ,
,
![]() ,
тогда
,
тогда
![]() .
.
Такой режим применяется
в следящих системах. Очевидно,
что составляющая
имеет смысл только для системы с
астатизмом 1-го порядка, то есть
![]() .
.
В
этом случае она называется скоростной
ошибкой или ошибкой по скорости ,т.к
пропорциональна скорости изменения
задающего воздействия.
![]() ,где К=
,где К=![]() - коэф-т передачи разомкнутой системы
назв. добротностью системы по скорости.
- коэф-т передачи разомкнутой системы
назв. добротностью системы по скорости.
Ошибка по скорости свидетельствует о том, что в установившемся режиме выходная величина будет изменяться со скоростью равной скорости изменения задающего воздействия, но с некоторым отставанием во времени.

Чем
больше добротность системы по скорости
,тем меньше будет отставать система при
отростке входного воздействия. ,тем
выше качество системы .В статической
системе ,при астатизме
>1
![]() =0
.
=0
.
Вторая
составляющая ошибки![]() представляет собой статическую ошибку
,т.к f(t)=
представляет собой статическую ошибку
,т.к f(t)=![]() =const
=const
Т.о
в этом типовом режиме![]()
В)
Задающее воздействие имеет вид
квадратичной функции:
![]() ,
где
,
где
а
=const – ускорение изменения
задающего воздействия F(t)=
1(t)
. Преобразуя по Лапласу![]() .
.
Этот
режим имеет смысл только для следящих
систем и систем программного регулирования,
обладающих астатизмом
>1.В этом случае![]()
Это
составляющая имеет смысл с =1 в этом
случае оте назв. ошибкой по ускорению![]() .
.
К=![]() - добротность по ускорению,
- добротность по ускорению,

Чем
выше
,тем лучше качество САР.В этом типовом
режиме установившееся ошибка![]() .
.
С помощью теоремы о конечном значении легко показать ,что в системе с =2 статическая скоростная ошибка от задающего воздействия=0.
Г) Задающее воздействие имеет вид синусоидальной функции.
G(t)=Gmax* sinwgt
Возмущающее воздействие изменятся в этом режиме ,либо оставаться постоянным. Рассмотрим ошибку только от задающего воздействия ,тогда её изображение
![]() (3)
(3)
Очевидно
,что в установившемся режиме ошибка
будет также изменятся по синусоидальному
закону с той же частотой![]() Eуст(t)=Emax
sinn(wgt+ф)
Eуст(t)=Emax
sinn(wgt+ф)
В этом режиме точность системы обычно оценивается по амплитуде ошибки, которая может быть найдена из (3) путем подстановки
P=jwg
![]()
Обычно
Gmax
![]() Emax
поэтому модуль знаменателя больше 1 , а
следовательно с большей точностью
можно принять , что
Emax
поэтому модуль знаменателя больше 1 , а
следовательно с большей точностью
можно принять , что
![]()
, где
A(wg)-АЧХ разомкнутой системы.
Из этого уравнения следует требования и АЧХ разомкнутой системы ,при достигается требуемая точность регулирования.
![]()
или 20lgA(wg)=L(wg) 20lgGmax/Emax
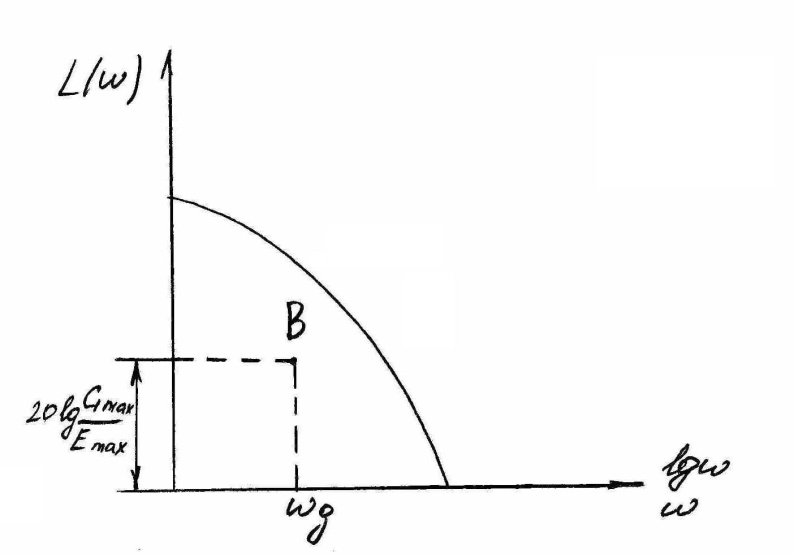
Последнее выражение ограничивает местоположение. ЛАХ около точки .Требования по точности.
Д)
Задающее воздействие имеет вид
произвольной функции .Если g(t)
имеет произвольную , то достаточно
плавную форму изменения, то для оценки
точности системы в установившемся
режиме существенное значение имеет
лишь конечное число n-производных
![]()
Установившееся
ошибка при задающем воздействии g(t)
может быть определена с помощью интеграла
свертки. Eуст(t)=
![]()
,где
![]() -весовая функция ошибки. Преобразуем
это выражение .Для этого разложим функцию
g(t-r)
на интервале от 0 до в ряд Тейлора
-весовая функция ошибки. Преобразуем
это выражение .Для этого разложим функцию
g(t-r)
на интервале от 0 до в ряд Тейлора

Подставляя это выражение в формулу свертки будем иметь
Eуст(t)=
,где
![]()
![]()
![]()
![]()
Коэффициенты определяющие величину ошибки назв. коэффициентами ошибок. Эти коэф-ты могут быть найден только с помощью выражения (3) и с помощью ПФ-и ошибки.
![]() (6)
(6)
Из операционного исчисления известно , что условие P=0 соот-т времени t= ,т.е установившемуся значению функции времени .Полагая в уравнение (6) р=0 находим коэффициент ошибки .
![]()
Продифференцировав уравнение (6) по переменной р n-раз и положив р=0 получим следующие коэффициенты ошибок.

Преобразуя уравнение (4) при нулевых начальных условиях получим ,изображение ошибки.
![]()
![]()
Выражение (7) представляет собой разложение функции в ряд Макларена.
Учитывая,
что ПФ ошибки представляет собой
дробно-рациональную функцию
![]()
,то коэф-ты ошибок можно определить путем деления числителя N(р) на полином знаменателя D( р) и сравнения получающегося ряда с выражением (7).
Выше было показано, что ПФ ошибки может быть представлена в виде
![]() .Тогда
для статических систем(
=0) ПФ ошибки
.Тогда
для статических систем(
=0) ПФ ошибки
![]() коэф-т ошибки .Т.о коэф-т определяет
астатизм системы ,а следовательно
статическую ошибку
коэф-т ошибки .Т.о коэф-т определяет
астатизм системы ,а следовательно
статическую ошибку![]() .
.
![]() выше систем с астатизмом 1-го порядка
выше систем с астатизмом 1-го порядка
![]()
![]()
![]()
Т.о коэф-т хар-т ошибку системы по скорости.
Для астатических систем 2-го порядка
![]()
![]()
,откуда
![]()
![]()
-характеризует ошибку по ускорению.
Т.о повышение порядка астатизма соответствует повышению точности САР.
Сравним
точности статической и астатической
систем.Пусть на вход систем поступает
сигнал
, тогда установившееся ошибка будет
определятся :для статической систем![]() .
.
Для астатической системы 1-го порядка
![]()
Для системы с астатизмом 2-го порядка
![]()
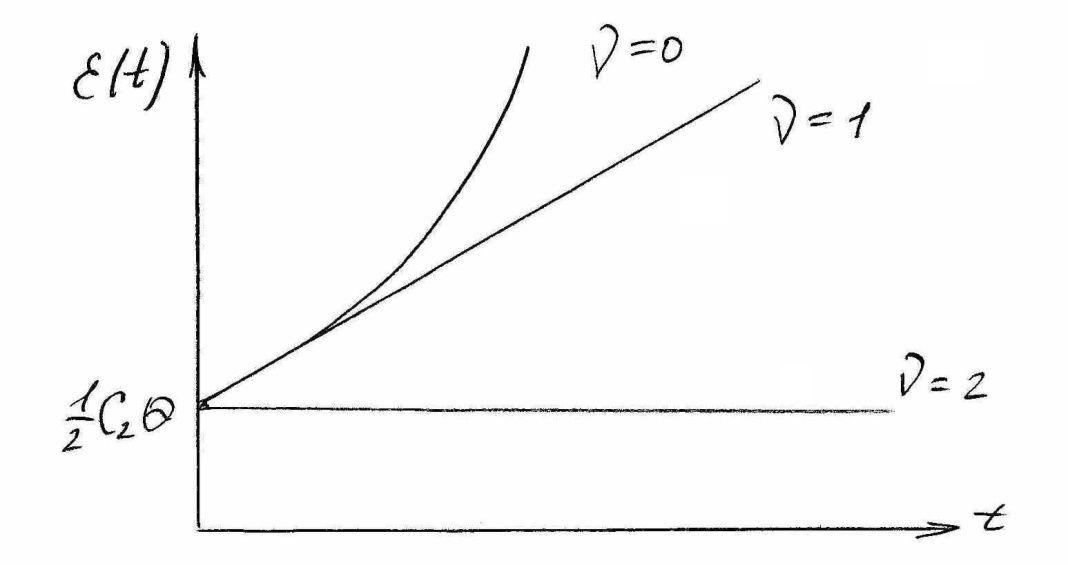
Рисунок 19
Как видно из рисунка 19 положительную точность имеет САР с астатизмом 2-го порядка.