

1. Расстояния измеряются до точечных ориентиров (рис. 3).
Рис. 3. Определение места судна по расстояниям до нескольких точечных ориентиров
Наблюдатель последовательно измеряет расстояния до нескольких ориентиров (А, В, С) с помощью подвижного кольца дальности (ПКД) РЛС (ПКД совмещают с той частью изображения, которая больше всего выступает в сторону судна).
Вначале измеряют DР до ориентиров близких к траверзу судна; в последнюю очередь – до находящихся на острых или тупых курсовых углах (ор. С).
Если скорость хода судна более 12 узлов, измерения следует приводить к одному месту (последнему замеру DР). По исправленным значениям расстояний (D = DР + ΔDР) определяем на путевой навигационной карте обсервованное место судна, как точку пересечения дуг окружностей, проведенных от мест ориентиров, радиусами R = D (DA, DB, DC).
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и «точечного» ориентира (рис. 4).
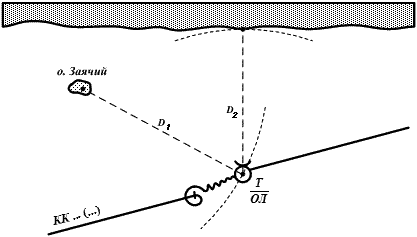
Рис.4. Определение места судна по расстояниям до ориентиров
От точечного ориентира радиусом, равным измеренному и исправленному расстоянию до него проводят дугу окружности и на ней ищут место, откуда дуга, проведенная радиусом, соответствующим второму измеренному и исправленному расстоянию, касалась бы плавной береговой черты.
Положение острия циркуля будет соответствовать обсервованному месту судна.
3. Расстояния измеряются до участков береговой черты с плавными очертаниями (рис. 21.5).

Рис.5. Определение места судна по расстояниям
В этом случае нужно измерять расстояния DP1 и DP2 до ближайших к судну точек береговой черты.
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии (т. С0) проводят дуги окружностей радиусами, равными измеренным и исправленным расстояниям D1 = DP1 + ΔDP и D2 = DP2 + ΔDP.
Дуги проводят примерно в районе тех курсовых углов (КУ), на которых были измерены эти расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку по путевой навигационной карте, находят такое ее положение, при котором дуги коснутся обоих участков берега (рис. 21.5).
Положение центра дуг в этот момент и определит обсервованное место судна.
Если участки береговой черты параллельны, место судна определить таким образом нельзя.
Если при измерении DP1 и DP2 измерялись и РЛП1, РЛП2, можно обойтись и без кальки.
Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентира (рис. 6)
Рис. 6. Определение места судна по пеленгу и расстоянию до одного ориентира
Этот способ применяется тогда, когда на экране ИКО РЛС виден только один хорошо различимый, лучше всего точечный, ориентир.
Обсервованное место получают на линии пеленга на измеренном и исправленном расстоянии до ориентира.
При прокладке линии пеленга не следует забывать исправлять его значение поправкой курса (ΔК + РЛП = ИП), а измеренное расстояние DP исправлять поправкой измерения дистанции (ΔDP).
ИП = РЛП + ΔК
D = DP + ΔDP
97. Отличия использования рлс на «переходе морем» и «на рейде»?
98. Способы снятия пеленга и дистанции на объект?
1. Перед началом измерения пеленгов с помощью НРЛС необходимо убедиться, что переключатель СЕВЕР-КУРС стоит в положении СЕВЕР, а положение курсовой отметки соответствует курсу корабля.
2. Для измерения пеленгов в разных типах НРЛС применяются различные визирные устройства:
- механический визир в виде двух параллельных нитей, расположенных в плоскости, перпендикулярной плоскости экрана;
- механический визир в виде тонкой пластинки, плоскость которой перпендикулярна плоскости экрана;
- линейно-параллельный механический визир в виде прозрачного диска с нанесенными на него с двух сторон параллельными линиями;
- электронный визир в виде светящейся линии, начало которой совпадает с началом развертки, а длина равна радиусу экрана.
3. При использовании механических визиров глаз наблюдателя должен располагаться так, чтобы линия визира проходила через начало развертки и середину отметки цели. Центр развертки должен быть совмещен с центром вращения механического визира. Отсчет пеленга снимают по шкале пеленгов, расположенной вокруг экрана индикатора.
4. При использовании электронного визира достаточно навести его на середину отметки цели; отсчет пеленга снимают со счетчика, расположенного на панели индикатора кругового обзора (ИКО).
5. При пеленговании береговых ориентиров необходимо учитывать особенности, указанные в ст. 40. Наиболее точно пеленгуется выступ побережья при нахождении корабля на линии, являющейся продолжением выступа в сторону моря.
6. При необходимости определения курсового угла на объект следует найти разность между измеренным пеленгом и курсом, заданным рулевому. Для более точного определения курсового угла необходимо в момент прохождения развертки через отметку цели на экране по команде "Ноль" зафиксировать отсчет курса по репитеру системы курсоуказания и быстро измерить пеленг (до момента второго прохождения развертки через отметку цели).
7. Для более точного измерения пеленга необходимо установить такую шкалу дальности, на которой эхо-сигнал от объекта наблюдается ближе к краю экрана.
8. В общем случае измеренный радиолокационный пеленг должен быть исправлен тремя поправками:
- поправкой за наклон палубы;
- поправкой системы курсоуказания;
- инструментальной поправкой.
9. Поправку к измеренному пеленгу за наклон палубы П (в градусах) находят по формуле:
П = 57,3sin q[ sin y sin qк sin q + (cos qк - cos y )cos q] , (1)
где q - курсовой угол на цель (в круговом счете);
y - угол дифферента; ему придают знак "+" при наклоне на нос и знак "-" - при наклоне на корму;
qк - угол крена; ему придают знак "+" при наклоне на правый борт и знак "-" - при наклоне на левый борт.
Максимальные погрешности измерения пеленга в градусах из-за неучета качки могут достигать величин, указанных в таблице :
Максимальные величины поправок к радиолокационному пеленгу за наклон палубы, градус |
|||||||||||
Угол крена, градус |
Угол дифферента, градус |
||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
0 |
0 |
0 |
0 |
0 |
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
1 |
0 |
0 |
0 |
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
2 |
0 |
0 |
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
3 |
0 |
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
4 |
0,1 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
5 |
0,1 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
6 |
0,2 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
7 |
0,2 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
8 |
0,3 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
9 |
0,4 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
10 |
0,4 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
11 |
0,5 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
12 |
0,6 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
13 |
0,7 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
14 |
0,9 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
15 |
1,0 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
16 |
1,1 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
2,9 |
17 |
1,2 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
2,9 |
3,1 |
18 |
1,4 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
2,9 |
3,1 |
3,3 |
19 |
1,6 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
2,9 |
3,1 |
3,3 |
3,6 |
20 |
1,7 |
1,9 |
2,1 |
2,3 |
2,5 |
2,7 |
2,9 |
3,1 |
3,3 |
3,6 |
3,9 |
10. Из формулы (1) видно, что при курсовых углах на цель 0° и 180° поправка за наклон палубы равна нулю. Поэтому для измерения пеленга на качке с максимально возможной точностью (например, при определении места по пеленгу и дистанции до одного ориентира на больших расстояниях) следует временно лечь на курс, равный пеленгу или обратному пеленгу на ориентир.
Если изменить курс нельзя, то в момент прохождения развертки через отметку ориентира берут пеленг на него и одновременно (по команде "Ноль") определяют курсовой угол на ориентир, углы крена и дифферента, после чего находят поправку к измеренному пеленгу по формуле (1).
Курсовой угол и углы качки измеряют с точностью до 1°. Если на корабле отсутствуют измерители качки и невозможно изменить курс корабля, то пеленг измеряют в тот момент, когда развертка проходит через отметку ориентира, а углы крена и дифферента при этом не более 3-5°.
11. Если представляется возможность определить поправку системы курсоуказания, то ею следует исправить радиолокационный пеленг.
12. Инструментальная поправка к радиолокационному пеленгу зависит от курсового угла на цель. Таблицу этих поправок составляют путем сравнения радиолокационных пеленгов точечной цели с визуальными пеленгами этой же цели при различных курсовых углах на нее (см.приложение 2).
13. Для измерения дистанции в навигационных РЛС применяются следующие устройства:
- неподвижные кольца дальности (НКД);
- подвижное кольцо дальности (ПКД);
- подвижный визир дальности (ПВД);
- индикатор точных координат (ИТК).
14. Неподвижные кольца дальности (НКД) используют для измерения дистанций на глаз и только тогда, когда в НРЛС нет других устройств измерения дальности. В остальных случаях НКД применяют для настройки изображения, оценки дистанций до объектов и для более быстрого наведения ПКД.
15. Для измерения дистанции середину ПКД (ПВД) совмещают с серединой отметки цели. При определении поправки к измеренным дистанциям последние должны измеряться точно таким же образом.
16. Подвижный визир дальности (ПВД) представляет собой яркостную метку дальности, перемещающуюся по электронному визиру. Для измерения дистанции вначале па цель наводят электронный визир, затем ПВД совмещают с отметкой цели.
17. Индикатор точных координат (ИТК) служит для точного измерения дистанции и применяется в РЛС, имеющих ПВД. Он представляет собой так называемую электронную лупу, т. е. дополнительный экран, на котором отображается обстановка в районе ПВД в увеличенном масштабе.
При грубом наведении ПВД на цель на экране ИТК появляется изображение ее отметки в крупном масштабе. С помощью рукоятки дальности добиваются совмещения центра отметки цели с горизонтальной линией, нанесенной на стекло экрана ИТК.
18. Измеренные дистанции должны быть исправлены инструментальной поправкой, которую определяют в соответствии с приложением 3.
При работе по РМО необходимо учитывать дополнительную поправку, являющуюся следствием задержки ответного сигнала (если она указана в РТСНО); эта поправка всегда отрицательна.
19. В устройстве МР-226 пеленги и дистанции до небольших объектов (судно, буй, островок и т. п.) могут измеряться автоматически после ввода этих объектов на автоматическое сопровождение.