

133. Для чего определяют Курс цели и Скорость цели?
Для того, чтобы выявить опасные цели.
134. Что такое dзад?
Для оценки степени линейной опасности судоводитель должен определить величину допустимого значения кратчайшего сближения DЗАД .
135. Чему равна по умолчанию dзад при плавании в океане?
Величина DЗАД зависит от навигационных условий плавания и определяется:
погрешностью измерения пеленгов и расстояний;
погрешностью в расчете значения DКР и навигационными условиями;
характером изменения параметров движения встречных судов;
маневренными характеристиками и размерами своего судна.
В практике судовождения величину DЗАД капитан назначает на основании личного опыта. С учетом изложенного выше минимальное значение DЗАД не может быть менее 0,5 мили. Рекомендуется назначать в условиях ограниченной видимости в стесненных условиях DЗАД = 0.5, а в условиях открытого моря 1.5- 2.0 мили, т.е.:
0,5 < DЗАД < 2,0.
Таким образом все суда, расстояние кратчайшего сближения с которыми менее допустимого (DКР < DЗАД) опасны по линейному критерию. При хорошей видимости расхождение выполняется и на меньшем расстоянии.
136. Кто задает «Упрежденную точку»?
Упрежденная точка определяет момент окончания маневра и начало перемещения эхо-сигнала по новой ЛОД. При этом учитывается временной фактор опасности. Для обоснования и выбора момента окончания маневра прежде всего необходимо знать временные характеристики или элементы движения своего судна. В процессе оценки начала ситуации судоводитель должен выбрать период упреждения ( Т у ) . Для упрощения расчетов удобнее назначать этот период в 3, 6, 9, 12 и т. д. минут. Необходимо помнить, что продолжительность упрежденного периода времени (Ty) влияет на величину маневра расхождения в конкретной ситуации. Чем продолжительнее величина периода, тем больше величина маневра. И соответственно, чем раньше выполнен маневр, тем больше разница в дистанции кратчайшего сближения (рис. 46).
Из простого анализа действий судоводителя в первый период (построение векторного треугольника, определение обстоятельств встречи судов и элементов движения встречного судна) и во второй (выбор упрежденной точки на ЛОД и определение периода упреждения Ty) можно сделать вывод, что судоводитель может предварительно производить обоснование и выбор маневра непосредственно после нанесения векторных треугольников, а иногда и раньше —после оценки ситуации с использованием линий послесвечения, зная особенности перемещения эхо-сигналов, а также после нанесения на планшет 3-минутных векторных треугольников.
Опытные судоводители используют период обоснования и выбора маневра для подтверждения правильности данного маневра, который был намечен еще в период оценки начала ситуации. Такая рациональная работа значительно сокращает время дальнейших расчетов элементов маневра и обеспечивает заблаговременность его выполнения.
137. Правило взятия пеленгов?
Измерение пеленга. Для определения направления на ориентиры используются электронные или механические визиры, которые совмещаются с отметками эхо-сигналов на экране РЛС. Если гирокомпас подключен к радиолокатору и изображение на экране стабилизировано по норду, то со шкалы снимается радиолокационный пеленг (РЛП). При стабилизации изображения по курсу со шкалы снимают радиолокационный курсовой угол (РЛКУ).
Расчеты ИП выполняются по соответствующим формулам:
ИП =РЛП+ΔГК; ИП = РЛКУ+КК+ΔК.
На точность радиолокационного пеленгования оказывают влияние ряд причин.
1. Ошибки визирования возникают при совмещении визирной линии с предполагаемой серединой отметки эхо-сигнала на экране РЛС. Основной причиной неточности совмещения является растягивание отметок эхо-сигналов по дуге пропорционально ширине диаграммы направленности (θ).
При различных отражающих способностях кромок объекта это растягивание бывает несимметричным. Ошибки визирования уменьшаются с удалением отметки от центра развертки. Так, средняя квадратичная ошибка визирования точечного объекта при удалении отметки на 1/3 радиуса экрана от центра развертки составляет ±0,6°, при удалении на 2/3 радиуса экрана — ±0,3°.
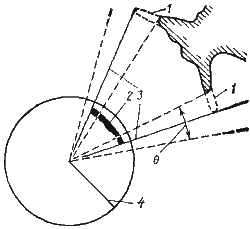
Особенно возрастают ошибки при пеленговании кромок протяженных объектов, облучаемых вдоль их водного уреза. В этом случае за счет ширины диаграммы направленности в горизонтальной плоскости эхо-сигнал на экране РЛС отмечается даже тогда, когда ее осевая линия не совмещена с кромкой объекта. Возникает угловая ошибка, учесть которую невозможно (рис. 102). По этой причине рекомендуется пеленговать только те мысы, которые вытянуты радиально по отношению к судну, т. е. облучаются «в упор».
|
Рис. 102. Ошибка радиолокационного пеленгования: I участки удлинения мысов; 2 эхо-сигнал; 3 — осевые линии диаграммы Э, соответствующие на экране РЛС пеленгам на мысы: 4 — отметка курса |
Отсюда видно, насколько точно должна выполняться регулировка РЛС по совмещению центров вращения механического визира и развертки. В случае использования электронного визира ошибки эксцентриситета отсутствуют.
Точность радиолокационного пеленга, помимо перечисленных причин, зависит от ошибки в нуле отсчета (±0,3°), от инструментальной ошибки (±0,3'°), ошибки в поправке компаса.
Действие всех этих причин приводит к тому, что точность радиолокационного пеленга значительно ниже точности визуального. При использовании механического визира средняя квадратичная ошибка радиолокационного пеленга с учетом ошибки в ΔК составляет ±1,5°.