

157. В чем отличия векторных и растровых карт?
Основные виды электронных карт.
Существуют два основных вида электронных навигационных карт (ENC):
Растровые карты (RNC) – это, по сути, сканированные копии бумажных карт, «привязанные» к координатной сетке.
Недостатки растровых карт:
• невозможно значительно изменить масштаб изображения карты;
• невозможно разгрузить карту, убрав с отображения некоторые слои;
• невозможно просмотреть информацию об объектах;
• невозможно обеспечить сигнализацию о пересечении или приближении к различным зонам и районам, включая зоны опасностей, опасных глубин, районов, закрытых для плавания.
Векторные карты.
В их основе – электронная база данных о картографических объектах. Такое представление позволяет хранить карту как совокупность отдельных элементов, лишено недостатков растровых карт и дает много дополнительных возможностей:
• производить автоматическую корректуру карт;
• судоводитель может включать или выключать на экране отображение различных классов картографических объектов, подбирая удобную для данных условий плавания конфигурацию отображения карты;
• можно установить слежение за любым ориентиром, установив на нем специальный маркер, включить тревожную сигнализацию при подходе к опасностям и т. п.;
• формат позволят объединять картографическую информацию с информацией, которой нет на самой карте, вводить новые информационные слои. При этом содержимое самой карты не изменяется;
• накладывать на карту данные о целях, получаемые от САРП, и т. п.
Сравнивая их можно сказать, что использование векторных карт более безопасно и удобно. В настоящее время покрытие мирового океана примерно на 90% обеспечено векторными картами.
158. Как настроить картографическую систему применительно к Вашему судну?
ЭКНИС и вся сопряженная с ней навигационная аппаратура, в том числе и приемоиндикатор (ПИ) глобальной навигационной спутниковой системы (ГНСС), должны быть приведены в рабочее состояние как минимум за час до отхода судна. На дисплей должна быть вызвана крупномасштабная карта стоянки. По результатам многократных определений координат места судна уточняется привязка к ним символа судна на экране дисплея. Для этого:
с интервалом 20—30 с принимается десять—двадцать отсчетов координат по ПИ ГНСС;
вычисляются средние значения широты и долготы;
на дисплей с помощью маркера наносятся координаты места судна и проверяется их совпадение с символом судна на дисплее.
159. Как устанавливается время в экнис?
160. Какие приборы задействованы в экнис?
Дисплей ЭКНИС может использоваться для отображения информации с радиолокатора, информации о радиолокационной цели, АИС и других соответствующих уровнях данных, способствующих выполнению исполнительной прокладки.
Эксплуатационные требования должны применяться ко всему оборудованию ЭКНИС, имеющемуся на всех судах в виде:
- специально предназначенной отдельной станции.
- многофункциональной станции, являющейся частью информационно-навигационной системы.
161. Привести пример и способы ввода корректуры в экнис?
Для поддержания ЭНК на уровне современности предусмотрены операции по их обновлению (корректуре). Основными документами, определяющими корректуру электронных карт в ЭКНИС, являются Стандарт IНО S-57 — "Стандарт передачи IHО цифровых гидрографических данных" и издание IНО S-52 "Стандарт содержания карт и отображения в ECDIS". Обобщенные результаты нашли отражение в Резолюции ИМО А.817(19) "Стандарты исполнения ECDIS ".
Согласно Стандарту IHО S-57 вся информация о навигационной обстановке хранится в векторной форме. Векторное представление дает существенную экономию объема памяти, требуемого для хранения карты. При этом необходимо минимальное время для перестроения карты на экране.
Структура системы корректуры ЭНК соответствует следующим принципам:
обновлению подвергается СЭНК, исходная КБД сохраняется в неизменном виде;
корректуры стандартизованы по структуре, системе классификации и кодирования; формат передачи данных соответствует формату DХ-90;
обновление СЭНК включает использование не только постоянных, временных и предварительных Извещений мореплавателям, но также относящихся к карте навигационных предупреждений NAVAREA и NAVTEX;
вносимая корректура не ухудшает СЭНК. Сведения о внесенной корректуре хранятся в памяти системы и отображаются по запросу оператора;
ответственность национальных гидрографических организаций за корректуры эквивалентна ответственности, которую они несут по корректуре бумажных навигационных карт.
В Стандарте S-52 вопросам корректуры посвящено приложение 1 — "Руководство по корректуре электронных навигационных карт". Там изложены требования к корректуре и сервису распространения корректурной информации:
а) официальные корректуры МГО должны отличаться от местных, выпущенных портовыми властями;
б) ЭКНИС минимальной способности должна отражать различные методы корректуры.
Руководство определяет следующие категории сервиса:
сервис по расписанию - передача корректуры в определенные интервалы времени, заранее известные отправителю и получателю;
сервис по требованию - передача корректуры по запросу пользователя;
чрезвычайный сервис — любая передача корректуры, не использующая регулярное расписание и содержащая срочную информацию, касающуюся электронной навигационной карты.
Стандарт S-52(5) предполагает выполнение и распространение корректуры в строго структурированной системе с использованием элементов проверки надежности и достоверности исходной информации, процедур контроля составления, пересылки и получения корректурной информации .
Все методы корректуры ЭК подразделяются на три группы: ручную, полную автоматическую и полуавтоматическую.
Ручная корректура основана на неформатированной информации корректуры (ИМ, передача голосом по радио и т. д.) и предполагает ввод корректурных данных оператором с пульта с использованием специальных программных средств, облегчающих выполнение этой задачи. Корректурная информация вводится в структурированной форме, соответствующей стандарту ЭКНИС, в котором определен формат ввода и операции корректур. Набор таких операций может включать в себя перечень картографических объектов (КО), редактирование характеристик КО, удаление КО либо его характеристики, включение КО либо его характеристики; переименование объектов.
Создаваемые судоводителем корректурные файлы нумеруются и хранятся в определенной последовательности. Обычно информация последующих файлов включает информацию предыдущих. Это позволяет периодически уничтожать предыдущие файлы.
Ручная корректура должна рассматриваться только как временная мера и должна быть заменена при первой возможности на корректуру ЭНК издающей организацией.
Автоматическая корректура считается наиболее целесообразным режимом внесения официальных корректур в ЭК. Она предполагает доставку данных корректуры в ЭКНИС напрямую от дистрибьютора, без какого-либо вмешательства человека. Это может быть достигнуто через передачу по радио, Интернет и т. д. Следуя процедурам подтверждения или приема ЭКНИС автоматически производит корректуру СЭНК. Судоводитель при этом не предпринимает никаких действий, а только отслеживает дату последней корректуры карт судовой коллекции, убеждаясь в том, что корректура прошла и карты откорректировались. В качестве стандартного формата автоматической корректуры электронных карт МГО предложен формат MACDIF.
В некоторых странах мира (США, Германия, Япония) разработаны и прошли испытания радиосистемы автоматической корректуры судовых СЭНК. Эта радиосистема обеспечивает прямую передачу корректурной информации в судовые базы данных от официальных гидрографических служб. Текущая корректурная информация, а также все прошлые корректуры могут быть получены от этой системы в любое время суток и в любой точке Земли.
При полуавтоматической корректуре корректурная информация может передаваться двумя способами: путем доставки на носителях в портах, по почте; либо на судно путем записи передаваемой по линиям телекоммуникационной связи корректурной информации на носитель. Информация на носителе должна быть записана в формате, который соответствует цифровой организации данных в КБД.
При полуавтоматической корректуре действия оператора ограничиваются установкой носителя корректурной информации (дискеты, оптического диска) в считывающее устройство.
При вводе корректур применяются методы защиты и контроля целостности получаемой информации — получаемая корректурная информация регистрируется, а оператору выдается сообщение о принятых и пропущенных номерах извещений.
Как правило, информацию о корректуре можно получить используя сеть Интернет и имея доступ к корректурным файлам карт судовой коллекции. Это осуществляется посредством заключения договора между фирмой-производителем корректуры и судовладельцем.
Откорректировать карты можно также, заказав через агента или представителя компании в порту диск СD с обновленной коллекцией карт или дискету с набором корректурных файлов на судовую коллекцию электронных карт. Наложение информации с дискеты на электронные карты производит их обновление. Карты с диска СD полностью заменяют коллекцию карт на откорректированные. Периодичность издания новых дисков СD обычно составляет три месяца.
Некоторые фирмы предлагают сервис корректуры, используя каналы телефонной связи. Для этого судоводитель в порту должен дозвониться до фирмы-производителя корректуры и получить кодированную информацию по корректуре для своей судовой коллекции по каналу телефонной связи.
Координация действий по распространению ЭНК и корректурной информации осуществляется специальным комитетом МГО по мировой базе данных электронных навигационных карт (WEND).
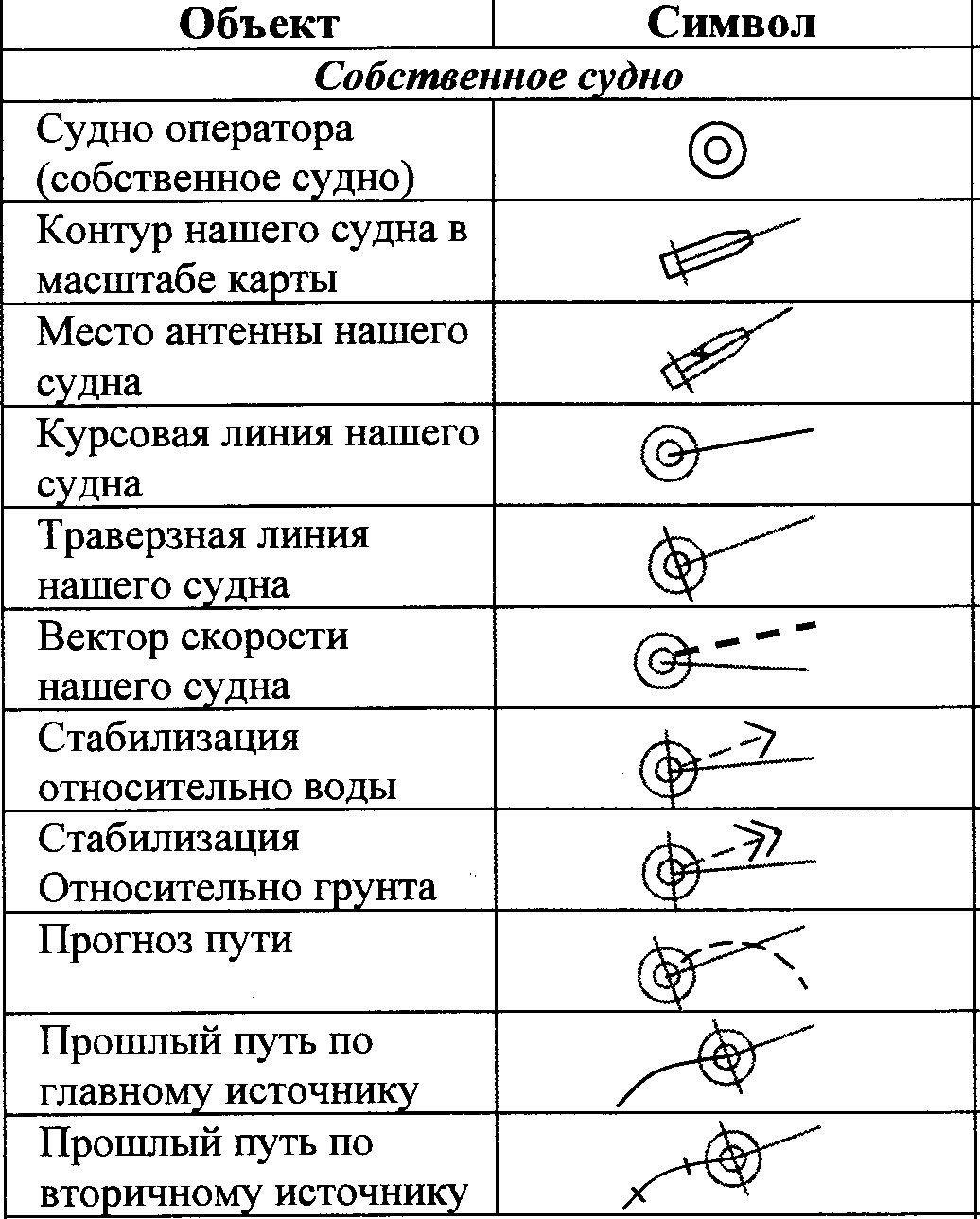
162. Каким символом обозначается место судна на карте определенное с помощью РЛС?
163. Кто принимает решение о включении приборов на мостике?
Капитан (судоводитель).
164. С какой частотой производится определение места судна?
Не реже одного – двух раз в час выполняется обсервация с помощью средств навигационного оборудования судна.
165. Как проверить определенное с помощью РЛС место судна?
Радиолокационные определения места судна представляют собой результат использования в различных комбинациях пеленгов и расстояний до опознанных ориентиров.
Способы определения места остаются те же, что и при визуальных наблюдениях, но РЛС в большинстве случаев расширяет возможности по измерению указанных навигационных параметров.
При определении места судна необходимо выполнять следующие практические рекомендации, учитывающие особенности РЛС.
1. Регулировки усиления и яркости не должны вызывать чрезмерного свечения отметок на экране, а само изображение должно иметь хорошую фокусировку.
2. Пеленговать только точечные или малоразмерные объекты, выдающиеся в море мысы пеленговать только «в упор».
3. Пеленгование выполнять на шкалах самого крупного масштаба и таких объектов, отметки которых удалены от центра развертки на расстояние более 1/3 радиуса экрана.
4. Выбирать объекты для измерения расстояний с наиболее четкими краями отметок эхо-сигналов.
5. Измерять расстояния, используя тот способ совмещения ПКД с отметкой эхо-сигнала, который использовался при калибровке РЛС.
Определение места по измеренным расстояниям до опознанных ориентиров. Для применения этого способа необходимо иметь в видимости РЛС не менее двух точечных ориентиров или ориентиров малой протяженности. Последовательность измерения расстояний, приведение их к одному моменту и прокладка места на карте аналогичны изложенному в § 34. Для оценки точности определения места по двум или трем расстояниям используются формулы (104) и (95) соответственно.
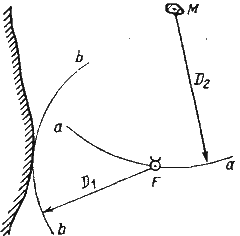
Определение места по измерению расстояний до точечного объекта и плавной береговой черты. Для определения места судна (рис. 103) измеряют в быстрой последовательности кратчайшее расстояние до береговой черты D1 и расстояние до точечного ориентира D2. Одновременно замечают время и отсчет лага. На карте из точечного ориентираМ как из центра проводят дугу окружности аа радиусом, равным D2. Далее, находят на дуге аа такую точку F, из которой дуга окружности bb, описанная радиусом D1, будет касательной к береговой черте. Полученная точка F будет являться местом судна.
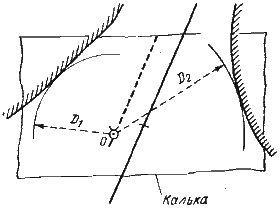
Определение места по кратчайшим расстояниям до береговой черты с плавными очертаниями. Способ применяется в том случае, когда на экране РЛС по различным направлениям видны ртметки опознанной береговой черты, не имеющей приметных ориентиров. С помощью ПКД (рис. 104) измеряют в быстрой последовательности кратчайшие расстояния до береговой черты D1 и D2, замечают время и показание лага. На листе кальки от произвольной точки О прокладывают линию курса судна и проводят дуги радиусами Dг и D2 в масштабе карты. На-
|
|
Рис. 103. Определение места по двум радиолокационным расстояниям |
Рис. 104. Определение места по берегам с плавными очертаниями |
|
|
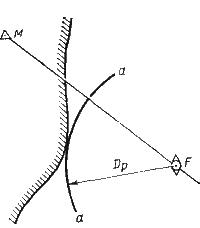
Рис. 105. Определение места по визуальному пеленгу и DP |
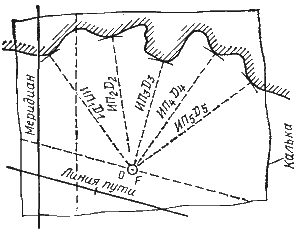
Рис. 106. Опознание места по вееру пеленгов и расстояний |
ложив кальку на карту в районе счислимого места, находят такое ее положение, при котором линии курсов на кальке и карте параллельны, а дуги радиусов D1 и D2 касаются соответствующих участков береговой черты. Накол циркулем в точке О даст положение места судна на карте.
Определение места по пеленгу и расстоянию. Если в пределах радиолокационной видимости находится опознанный точечный ориентир или ориентир малой протяженности, то для определения места судна измеряют радиолокационный пеленг и расстояние до него. Место судна на карте получается путем построений, изложенных в § 35.
Иногда бывает невозможно получить радиолокационный пеленг, так как ориентир не распознается на экране РЛС. В этом случае измеряют кратчайшее расстояние до плавной береговой черты D и берут визуально пеленг на ориентир М(рис. 105). На карте проводят линию ИП от ориентира М и с помощью циркуля находят на ней такую точку F, из которой дугааа радиусом, равным Dp в масштабе карты, была бы касательной к береговой черте. Точка F является обсервованным местом судна.
Точность данного способа может быть оценена по формуле (105). Применяя этот способ определения, часто радиолокационный пеленг заменяют визуальным, что значительно повышает точность обсервации.
Опознание места судна по вееру пеленгов и расстояний. Способ может быть применен при плавании в районе с обрывистым берегом, имеющим характерные изгибы. Желательно, чтобы на карте был показан рельеф прилегающей суши и проведены горизонтали.
Для опознания места с помощью РЛС в быстрой последовательности берут серию пеленгов и расстояний до четких характерных отметок эхо-сигналов на экране. В основном это будут расстояния, измеренные до береговой черты, а иногда, в низменных участках, до характерных складок местности. При скорости судна менее 12 уз время и отсчет лага замечают в момент средних наблюдений.
Далее, на листе кальки проводят линии истинного меридиана и пути судна. Выбрав на линии пути произвольную точкуF, прокладывают из нее измеренные истинные пеленги и откладывают по ним в масштабе карты измеренные расстояния (рис. 106). Кальку накладывают на карту в районе счислимого места и добиваются совпадения большинства конечных точек пеленгов с характерными изгибами береговой черты или деталями рельефа берега. При этом необходимо следить, чтобы линии меридианов и пути судна на кальке и карте оставались параллельными друг другу. Накол циркулем через кальку в точке F дает место судна на момент средних наблюдений.
Если скорость судна более 12 уз, то время и лаг замечают при каждом измерении пеленга и расстояния. В этом случае на кальке первые измерения откладывают от произвольной точки пути судна, а остальные — от точек, рассчитанных по счислению в масштабе карты. Далее поступают так же, как и в первом случае. Накол циркулем через кальку в последней точке на линии пути судна дает его опознанное место на момент последних наблюдений.
Чем больше будет выполнено наблюдений, тем точнее будет опознано место судна. Однако, чтобы исключить возможность случайного совпадения конечных точек пеленгов, необходимо опознание повторить несколько раз, сопоставляя его результаты с данными счисления.