

67) Определение маневренности. Оценочные показатели.
Автомобиль должен иметь возможность существенно изменять направление движения на ограниченном пути. Это необходимо при маневрировании в местах погрузки и разгрузки на небольшой площади, на городских маршрутах, характеризующихся большим количеством (около 70 %) поворотов на 90°. Иногда появляется необходимость в движении задним ходом или полном развороте, причем почти всегда имеющаяся для этого площадь ограничена.
Маневренностью называется группа свойств, характеризующих возможность автомобиля изменять заданным образом свое положение на ограниченной площади в условиях, требующих движения по траекториям большой кривизны с резким изменением направлений, в том числе и задом ходом
Маневренность может быть охарактеризована следующими оценочными показателями:
1) минимальным радиусом поворота Rmin Расстояние от центра поворота до оси следа переднего забегающего колеса при максимальных углах поворота управляемых колес;
2) внешним габаритным радиусом поворота R габ max. Этот размер замеряют для тех же условий по точке автомобиля (например, буфер, переднее колесо), наиболее удаленной от центра поворота;
3) внутренним габаритным радиусом поворота R габ, min определяют по точке, наиболее приближенной к центру поворота;
4) поворотной шириной автомобиля по следу колес Bп. Разность самого большого и самого малого радиусов поворота по осям следов соответствующих колес (наиболее удаленного и наиболее приближенного к центру поворота);
5) габаритной полосой движения;
6) удельной тяговой силой Фп, необходимой для совершения поворота. Необходимая для совершения поворота сила определяется отношением тяговой силы на ведущих колесах к силе тяжести автомобиля при повороте его с минимальным или близким к нему радиусом, а также с минимальной устойчивой скоростью vmin ≈5 км/ч;
7) коэффициентом использования сцепной силы колес kφi при повороте. Коэффициентом kφi одного моста при повороте называется отношение суммарной силы, действующей в контакте этих колес, к потенциально возможной силе по сцеплению;
8) усилием на рулевом колесе при повороте управляемых колес на месте. Этот параметр измеряют при плавном повороте управляемых колес автомобиля из нейтрального положения до упора в одну и другую стороны.
9) сложностью осуществления управляемого движения задним ходом. Для автопоездов предлагается два экспериментальных показателя маневренности при движении задним ходом: длина пути, пройденного автопоездом с закрепленным рулевым колесом до начала складывания; число поворотов рулевого колеса на единицу пути при управляемом движении автопоезда относительно прямой опорной линии.
68) Кинематика криволинейного движения.
Для изменения направления движения к автомобилю должны быть приложены поперечные силы, определяемые моментом сопротивления повороту и инерционными силами. Если автомобиль или прицеп (полуприцеп) имеет не более одного неуправляемого моста, а криволинейное движение происходит с небольшой скоростью (до 10 км/ч) на недеформируемом грунте, то поперечные силы по своему действию оказываются незначительными, а увод колес практически не влияет на кинематические параметры поворота. В этих случаях кинематические параметры криволинейного движения можно рассматривать вне связи с действующими силами и, следовательно, без учета увода.
Е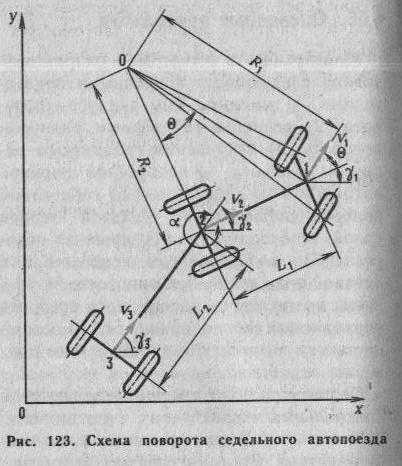 сли
поворот автомобиля происходит на
деформируемом грунте, а также, если
схема или конструкция автомобиля
создают вероятность возникновения
большего момента сопротивления повороту,
то принятию допущения о неучете
влияния динамических характеристик на
кинематические параметры поворота
должен предшествовать соответствующий
анализ.
сли
поворот автомобиля происходит на
деформируемом грунте, а также, если
схема или конструкция автомобиля
создают вероятность возникновения
большего момента сопротивления повороту,
то принятию допущения о неучете
влияния динамических характеристик на
кинематические параметры поворота
должен предшествовать соответствующий
анализ.
На рис. 123 представлена расчетная схема поворота седельного автопоезда, состоящего из двухосного автомобиля-тягача и одноосного полуприцепа. Принятые допущения: колеса автопоезда считаются жесткими в боковом направлении; рассматривается плоская модель автопоезда, следовательно, влияние крена на траекторию движения не учитывают, так же как трение и зазоры в седельно-сцепном устройстве.
На схеме обозначены: точками /, 2, 3— середины осей автопоезда; vi — скорости середин осей автопоезда; θ — средний угол поворота управляемых колес; γi — курсовые углы кинематических звеньев автопоезда; L1 и L2 — базы соответственно автомобиля-тягача и полуприцепа; Ri— радиус кривизны траектории середины осей автопоезда. Заданными считаются: закон изменения среднего угла поворота управляемых колес θ=f(t); скорость движения середины ведущего моста v2=const. Угловая скорость поворота автомобиля- тягача ωт = γi = v1/R1 = v2/R2 = v1sinθ/L1,
так как v1 = v2/cosθ, тo
 =
v2tgθ/L1 (279)
=
v2tgθ/L1 (279)
Курсовой угол автомобиля-тягача γ1 определяется интегрированием последнего выражения (279).
Проекции скорости vi на оси координат
Используя эти уравнения, можно вычислить координаты точки 1
 (280)
(280)
Координаты точки 2 связаны с координатами точки 1 геометрическими соотношениями
 (281)
(281)
Угловая скорость поворота полуприцепа может быть получена аналогично угловой скорости автомобиля-тягача, т. е.
 (282)
(282)
где α=γ1-γ2. так как отсчет угла α идет от оси полуприцепа против часовой стрелки до вектора скорости v2.
Курсовой угол γ2 определяется решением дифференциального уравнения (282).
Координаты точки 3 связаны с координатами точки 2
 (283)
(283)
Таким образом, последовательное решение уравнений (279)...(283) с определенным шагом интегрирования позволяет получить координаты основных точек автопоезда и построить траектории их движения.
При равных нагрузках на неуправляемые мосты, что обычно обеспечивается балансирной подвеской тележки, можно считать одинаковыми и коэффициенты сопротивления их боковому уводу осей, и тогда приведенная база трехосной схемы с балансирной тележкой
где l— база тележки; L1— расстояние от переднего моста (шкворня) автомобиля до первого моста тележки.