

32. Принципы регулирования: по отклонению, по возмущению, по комбинированному способу
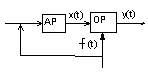
По возмущению
 В
этом случае измер велич возмущ f(t)
и этот сигнал вводит в регулятор.При
этом регуляторе выбираются такое
действие х(t),
что полностью компинсир вредным влиянием
f(t)
и регулир величин у(t)
не измен.
В
этом случае измер велич возмущ f(t)
и этот сигнал вводит в регулятор.При
этом регуляторе выбираются такое
действие х(t),
что полностью компинсир вредным влиянием
f(t)
и регулир величин у(t)
не измен.
Недостатки:1-регулирование осуществл лишь по тому возмущению, которое измеряется регулятором. При наличии др.возмущен., задача регулиров.не выполняется 2- Отклонение от заданной велич y(t) может расти с течением времени из-за нестабильности параметров САР
По отклонению (с
отрицат.обратной связью)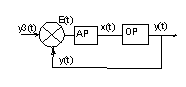
САР работающий по отклонению явл-ся сист с обратной связью. Под обратной связью поним подачу сигнала с выхода САР на ее вход
При регулиров по отклон. Определяется величина согласования E(t)=y3(t)- y (t) который явл входным сигналом регулятора
Регулятор выбирает такое х(t), чтобы свести Е(t) к 0
По комбинированному способу
Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению.
Из множества возмущающ.воздействий выбирается самое существенное, который компенсир по 1 способу, а действие остальн возмещен устраняется по 2 способу
По цели регулир.САР делятся:
1-система автоматичес стабилиз у которых задающ воздействие y3(t) пост по времени
2-сист програмир регулир-задающ возд-я измен по заранее заданному закону
3-следящая система-задающая воздействия y3(t) изменяется по заранее неизвестному закону и для системы является случайной величиной.
6)Способы выражения погрешностей (абсолютные,относительные,приведенные)
1)В виде абсолютной погрешности
![]()
![]() абсолютная
погрешность
абсолютная
погрешность
Хизм- изменение значимой величины
Хист-истинное значение
За Хистпринимается значение изменяемой величины определение прибором более точным
2)В виде относительной погрешности
![]() ,
%
,
%
Относительная погрешность определяет точность изменений
3)Приведенная погрешность
![]()
ХN-нормированное значение изменяемой величины
Обычно это диапазон изменений
Все преобразователи в зависимости от их точности делятся на классы точности.
Числовое значение класса точности соответствие max приведенной погрешности
![]()
38. Динамич.свойства объектов регулирования.
1-инарционость-входной параметр, который плавно изменяется Инационость объектов определяются способностью их накапливать-вещество или энергию.(например-нагревание и остывание Переходная характеристика инарцион объекта-в момент времени т1 подано ступенчатое возмещение, в результате входной параметр у вырастает от 1уровня до 2 А) инарцион.объекта характерезуется постоянни времени объекта т-это время за которое регулир.величина достигла бы нового установившегося значения если бы изменилась всё время с макс.скоростью
Б) емкостью объекта с. С=увеличению запаса вещества или энергии которая вызывает рост регулируемой величины на единицу
2)Запаздывание- изменение выходного параметра отстаёт по времени относительно возможного воздействия.
Различают: транспортное и переходное запаздывание. Транспортное объясняется тем, что требуется нек время для распростр сигналов (наблюдается в конвейерах в газопроводах большой длины)
Переходное- выражается тем, что выходной параметр вначале меняется оч медленно (проявляется только в многоёмких объектах)
3)Устойчивость- устойчивые объекты под влиянием ступенчатого воздействия переходит из одногот равновесного состояния в другое. это выравнивание осуществляется самим объектом поэтому наз.самовыравнивание.
Равновесное состояние( сколько приход-столько уход)
Объектом самовыравнивания явл устойчивые в них существует внутр отриц обрат связь.