

2) Функции элементов автоматики:
Датчик(измерит ориент чувствительный элемент) элемент преобразующий контролируемую или регулируемую величины, в величину др.вида более удобного для воздействия на управляющий орган системы автоматики. Статич.хар-ка: при плавном измерении х и у-плавно изменяется, стремиться получить прямолинейную характеристику исходящую из 0. Наиболее часто датчики преобразуют неэлектрическую величину х в электрич у.
Статическая характер имеет вид:
При этом ток представляет собой:
1-изменение параметра электрической цепи 2 изменение эдс. В первом случае датчики назыв- параметрич, во втором-генераторными В параметрическом датчике энергия у берется от э, в генераторных от х.
К параметрическим относятся реостатные, термосопротивление, индуктивные, емкостные. К генераторным-термопары,пьезоэлементы,такогенераторы. Усилитель-элемент в котором происходит количественное преобразование (усиление) измерительной величины у > х за счет эдс. Статическая характеристика усилителя такая же как датчиков. Бывают: электронные,магнитные, электромеханические, электромагнитные.
По роду носителя:пневматическое, гидравлическое,электрическое. Реле-элемент в котором при достижении вход величины хо пред значения,выходная величина у изменяется скачком.

Двигатели – элемент служащий для преобразования энергии того или иного вида в механич движении. Самым распространенным явл асинхронный двигатель.
Стабилизаторы-элем кот поддерж постоянную вход величину у
Распределитель-элем кот поочередно подключает 1 цепь к ряду др.
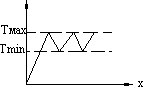
40.Двухпозиционное регулирование
Такой регулятор при возникновении рассогласования скачком перемещает регулирующий орган из одной позиции в другую. Среднего положения у регулир.органа не бывает, т.е.вентиль открыт и вентиль закрыт.
x(t)=0,если ε(t)<0, а хмах ,если ε(t)>0
«+»простота
«-»регулирум величина может значит колеб около заданного значения.
Применяется на объектах если не требует высокого качества регулирования
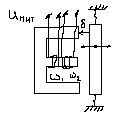
14. Индуктивные датчики: простые, трансформаторные.
Вход величина-перемещение, выход-изменение индукции L или М взаимоиндукции L=w2/Rв+Rж
W-число витков обмотки
Rв-сопр возд-го зазора магнитному
Rж-сопрот железного сердечника
1-простые датчики
XL=w*L+2ПfL
I=U/ XL
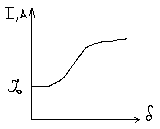
При перемещении якоря вправо зазор увеличивается, Rв-растет, XL и L-падает, увелич ток в цепи обмотки, что и показывает амперметр, шкала которого выполнена в единицах перемещения (мм).Такие датчики примен для перемещения неболее 1 мм.
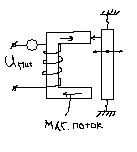
трансформаторные датчики
Вход величина-перемещение, вых- изменение взаимоинерции М
М=w1- w2/Rв+Rж
W1-первичная обмотка
W2-вторичная обмотка, является выходной обмоткой,и на ней проводиться напряжение (ЭДС), велич которой зависит от взаимомагнитности М, М показ степень магнитной связи между 2-мя обмотками.
Чем больше М, тем больше связанны с собой обмотки, тем больше едс наводиться на входной обмотки.
При перемещении якоря вправо Rв растет,связь между обмотками ухудшается и вых-е напряжение Uвых уменьшается.