

42. Назначение маховика и определение его момента инерции.
Маховик (Маховое колесо) — массивный вращающийся диск, использующийся в качестве накопителя (инерционный аккумулятор) кинетической энергии. Также маховиком называют регулировочное колесо, похожее по форме.
Используется в машинах, имеющих неравномерное поступление или использование энергии, накапливая энергию, когда поступление энергии выше чем расход, и отдавая её, когда потребление превышает поступление энергии.
Помимо энергии, вращающийся маховик накапливает ещё и момент импульса, что используется для ориентации космических аппаратов.
Определение момента инерции махового колеса
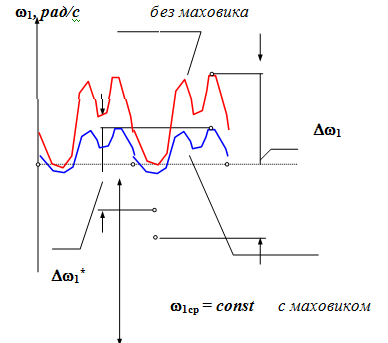
Рассмотрим подробно наиболее простой способ регулирования неравномерности вращения установку дополнительной маховой массы или маховика. Маховик в машине выполняет роль аккумулятора кинетической энергии. При разгоне часть положительной работы внешних сил расходуется на увеличение кинетической энергии маховика и скорость до которой разгоняется система становится меньше, при торможении маховик отдает запасенную энергию обратно в систему и величина снижения скорости машины уменьшается. Сказанное иллюстрируется графиками, изображенными на рис. 13.2. На этом рисунке: 1 изменение угловой скорости до установки маховика, 1* после установки маховика. Отсюда можно сделать вывод: чем больше дополнительная маховая масса, тем меньше изменение 1* и коэффициент неравномерности .
Произведём
расчет махового колеса по заданному
коэффициенту неравномерности
для двух случаев: 1. Частный случай: для
машин с постоянным приведённым моментом
инерции
![]() .
.
Пусть
за время периода работа движущих сил
не равна работе сил сопротивления тогда
максимальные и минимальные угловые
скорости будут соответствовать
максимальным и минимальным энергиям:
 ,
где Аизб.макс.
– максимальная избыточная работа; Ад.с.
– работа движущих сил; Ас.с.
– работа сил сопротивлений; Emax
– максимальная кинетическая энергия
механизма; Emin
– минимальная кинетическая энергия
механизма; Jпр
– приведённый момент инерции масс; Jмах
– момент инерции махового колеса.
,
где Аизб.макс.
– максимальная избыточная работа; Ад.с.
– работа движущих сил; Ас.с.
– работа сил сопротивлений; Emax
– максимальная кинетическая энергия
механизма; Emin
– минимальная кинетическая энергия
механизма; Jпр
– приведённый момент инерции масс; Jмах
– момент инерции махового колеса.
Тогда
преобразуя:
 .
.
Окончательно
получаем:
![]() .
.
2.
Общий случай (для машин с переменным
приведённым моментом инерции
![]() ),
положения с максимальными и минимальными
значениями скорости не совпадают с
положениями при которых максимальные
и минимальные значения энергии. Рассмотрим
графический способ по методу Виттенбауэра
(метод построения диаграммы энерго-масс).
),
положения с максимальными и минимальными
значениями скорости не совпадают с
положениями при которых максимальные
и минимальные значения энергии. Рассмотрим
графический способ по методу Виттенбауэра
(метод построения диаграммы энерго-масс).
44. Цель, теоретические основы и порядок силового исследования машин. Статически определимые кинематические цепи.
Силовой расчет типовых механизмов
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета: 1) статический - для механизмов находящихся в покое или движущихся с малыми скоростями, когда инерционные силы пренебрежимо малы, или в случаях, когда неизвестны массы и моменты инерции звеньев механизма (на этапах, предшествующих эскизному проектированию);
Уравнения
статического равновесия: где
Рi
внешние силы, приложенные к механизму
или его звеньям; Mi
внешние моменты сил, приложенные к
механизму или его звеньям. 2) кинетостатический
для движущихся механизмов при известных
массах и моментах инерции звеньев, когда
пренебрежение инерционными силами
приводит к существенным погрешностям;
где
Рi
внешние силы, приложенные к механизму
или его звеньям; Mi
внешние моменты сил, приложенные к
механизму или его звеньям. 2) кинетостатический
для движущихся механизмов при известных
массах и моментах инерции звеньев, когда
пренебрежение инерционными силами
приводит к существенным погрешностям;
Уравнения
кинетостатического равновесия: где
Риi
инерционные силы, приложенные к звеньям;
Mиi
моменты сил инерции, приложенные к
звеньям.
где
Риi
инерционные силы, приложенные к звеньям;
Mиi
моменты сил инерции, приложенные к
звеньям.
3) кинетостатический с учетом трения - может быть проведен когда определены характеристики трения в кинематических парах и размеры элементов пар.
Определение числа неизвестных при силовом расчете. Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. Так как каждая связь в кинематической паре механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых кинематическими парами механизма.
Порядок
силового расчета: 1.Определяются
все внешние нагрузки, действующие на
звенья механизма. 2.Выделяются гр.Ассура
3.Производится силовой расчет с наиболее
удаленной группой. 4.Последним
рассчитывается ведущее начальное звено,
использую уравнения равновесия
Статически определимые системы
Еcли чиcло ypавнений pавновеcия pавно чиcлy элементаpных cвязей cиcтемы С, включая опорные, то ycилия в этих cвязях можно однозначно опpеделить из этих ypавнений. Для этого необходимо, чтобы чиcло cвязей C было pавно в плоcкой cиcтеме 3D, а в пpоcтpанcтвенной 6Б, так как общее чиcло cтепеней cвободы cиcтемы c жеcткими элементами и cвязями: n = 3D C (в плоcкой cиcтеме); n = 6Б C (в пpоcтpанcтвенной cиcтеме).
Опpеделенное таким обpазом чиcло cтепеней cвободы cиcтемы называетcя cтепенью или числом геометрической изменяемоcти cиcтемы. Реальные cиcтемы должны быть неизменяемыми, т.е. обладать нyлевой или отpицательной cтепенью изменяемоcти.
Cиcтемы c одной cтепенью изменяемоcти называютcя механизмами; c неcколькими cтепенями изменяемоcти кинематичеcкими цепями. Cиcтемы c нyлевой cтепенью изменяемоcти называютcя cтатичеcки опpеделимыми.
Итак, в cтатичеcки опpеделимых cиcтемах n = 0. Заметим, что n = 0 для систем, находящихся в равновесном состоянии, является необходимым, а n = 0 и W = 0 необходимым и достаточным условием статической определимости и геометрической неизменяемости системы. Поcколькy ypавнения pавновеcия вcегда линейные, то для опpеделения внyтpенних cил в cтатичеcки опpеделимых cиcтемах можно пользоватьcя пpинципом незавиcимоcти дейcтвия cил. В cтатичеcки опpеделимых cиcтемах значения усилий можно однозначно определить методом сечений с применением уравнений равновесия статики.
Статичеcки опpеделимые cиcтемы имеют и cвои недоcтатки, главным из котоpых являетcя отcyтcтвие pезеpвиpования. В cлyчае pазpyшения одного из элементов заданной системы, она превращается в геометрически изменяемую. Данное обстоятельство снижает надежноcть и безопаcноcть статически определимых систем в эксплуатационных режимах. В этом отношении пpеимyщеcтво имеют cиcтемы c “лишними” cвязями, т.е. c отpицательной cтепенью изменяемоcти, полyчившие название cтатичеcки неопpеделимых cиcтем.