Обозначения величин и соотношений
Величины, законы и методы |
При анализе резистивных цепей во временной области |
При комплексном анализе на синусоидальном токе |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ЭДС |
e |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ток источника |
J |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Напряжение |
u |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ток |
i |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Сопротивление |
R |
Z = R + jX |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Проводимость |
G |
Y = G – jB |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Закон Ома |
u = Ri |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
“ “ |
i = Gu |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
1-й закон Кирхгофа |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
2-й закон Кирхгофа |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Узловые уравнения |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Контурные уравнения |
|
18
.Электрическое сосотояние цепи с
последовательным соединением
элементов
Для схемы рис. 2.7
уравнение по второму закону Кирхгофа для мгновенных значений запишем в виде:
Пусть
Вектор тока и векторная диаграмма напряжений приведены на рис. 2.8
Векторы
напряжений на активном и
реактивном элементах ортогональны,
а векторы напряжений на
и
смещены
на
В комплексной форме уравнение (8) примет вид:
Здесь
На
комплексной плоскости
сопротивления
,
Если
сопротивления умножить на
Сравнивания уравнения (8) и (9), отметим, что дифференциальные уравнения (8) после замены мгновенных значений их комплексными символами переводится в уравнение алгебраическое (9). Это одно из преимуществ комплексного метода расчета.
Введение
понятия комплексного сопротивления,
позволяет написать закон Ома для всей
цепи в комплексной форме Таким образом, для целей переменного тока можно составлять уравнения, по структуре сходной с уравнениями для цепей постоянного тока. В современных условиях контроль за технологическими процессами, потреблением электрической энергии, режимом работы электрооборудования, измерением неэлектрических величин осуществляется с помощью электроизмерительных приборов. Эти приборы измеряют ток, напряжение, мощность, cos(), частоту, электрическую энергию и т.д.
19.
Треугольники напряжений, сопротивлений
и мощностей
ТРЕУГОЛЬНИК НАПРЯЖЕНИЙ - графическое
изображение активного Ua, реактивного
Ul и входного Uвх напряжений в цепи
переменного тока с активным
сопротивлением и индуктивностью.
Если стороны треугольника напряжений (фиг. 155, а) разделить на ток I (фиг. 155, б), то углы треугольника от этого не из менятся, и мы получим новый треугольник, подобный первому — треугольник сопротивлений (фиг. 155, в).
В треугольнике сопротивления, показанном отдельно на фиг. 156, все стороны обозначают сопротивления, причем гипотенуза его является полным или кажущимся сопротивлением цепи. Из треугольника сопротивлений видно, что полное или кажущееся сопротивление z равно геометрической сумме активного r и индуктивного xL сопротивлений. Применяя теорему Пифагора к треугольнику сопротивлений, получаем:
Если одно из сопротивлений цепи - (активное или реактивное), например, в 10 и более раз меньше другого, то меньшим можно пренебречь, в чем легко убедиться непосредственным расчетом.
ТРЕУГОЛЬНИК
МОЩНОСТЕЙ - графическое изображение
активной, реактивной и полной мощностей
в цепи переменного тока.
21. Параллельные соединения элементов , , .
Для схемы рис. 2.11
составим уравнение по первому закону Кирхгофа для мгновенных значений:
Если
Здесь
Единица измерения проводимостей - сименс (Сим). Векторная диаграмма токов приведена на рис. 2.12.
Уравнение (11) в комплексной форме:
Здесь
Проводимости
Комплексная векторная диаграмма токов для уравнения (12) приведена нарис. 2.14.
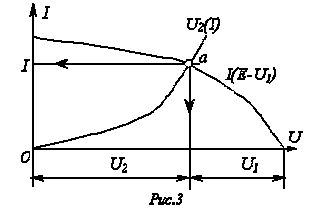
22 . Треугольники токов, проводимостей и мощностей Как известно, любая электрическая цепь состоит или может быть представлена в виде двухполюсников. Пассивный двухполюсник однозначно определяется значениями тока и напряжения на входе или их отношением. Пусть через некоторый двухполюсник протекает переменный ток и существует падение напряжения. Изобразим ток и напряжение на входе двухполюсника векторами на комплексной плоскости I и U (рис. 1). Проектируя вектор U на направление вектора I (рис. 1 а)), получим вектор, модуль которого равен Uа=Ucos , где - разность начальных фаз напряжения и тока на входе двухполюсника, причем, направление вектора Uа совпадает с направлением вектора тока, поэтому его запись в показательной форме будет иметь вид
где i - начальная фаза тока на входе двухполюсника. Перпендикуляр, опущенный из конца вектора U на направление вектора тока, имеет длину Usin и может рассматриваться как некоторый вектор Uр , сумма которого с вектором Uа равна U (рис. 1 а)). Его также можно записать в показательной форме в виде
Оператор поворота j в выражении (2) учитывает перпендикулярное положение вектора Uр по отношению к I и условие Uа + Uр = U. Так как по построению векторы Uа и Uр в сумме равны U, то из выражений (1) и (2) вектор напряжения на входе двухполюсника можно представить как
Разделим выражение (3) на модуль вектора тока[an error occurred while processing this directive]
Выражение (4) соответствует представлению на комплексной плоскости вектора Z, равного комплексному сопротивлению двухполюсника и развернутого относительно вещественной оси на угол i. При этом вектор Zeje ji=Zej(u i+i)= Ze ju образует с вещественной осью комплексной плоскости угол u , т.е. оказывается совпадающим по направлению с вектором U. Сравнивая вещественные и мнимые части выражений (3) и (4), можно представить модули составляющих вектора U в виде
т.е. модуль составляющей Uа , называемой активной или резистивной составляющей напряжения на входе двухполюсника, представляет собой падение напряжения на резистивной составляющей его комплексного сопротивления при токе I . Аналогично, модуль вектора Uр , называемого реактивной составляющей входного напряжения, является падением напряжения на реактивной составляющей комплексного сопротивления. Рассмотренным соотношениям величин соответствует представление двухполюсника последовательным соединением резистора R и реактивного сопротивления X, представленным на рис. 1 а). Таким образом, вектор падения напряжения на входе двухполюсника может быть представлен двумя составляющими, одна из которых является его проекцией на направление вектора входного тока и называется активной (резистивной) составляющей или активным падением напряжения. Активная составляющая соответствует падению напряжения на резистивном сопротивлении последовательной эквивалентной схемы двухполюсника. Вторая составляющая перпендикулярна вектору тока и соответствует падению напряжения на реактивном сопротивлении последовательной эквивалентной схемы. Прямоугольные треугольники UUаUр и ZRX (рис. 1 а)) подобны и называются соответственно треугольниками напряжений и сопротивлений. В настоящее время создано большое количество самых разнообразных электронных приборов и устройств. При практическом использовании они соединяются между собой с помощью электрических цепей, в простейших случаях состоящих из пассивных компонентов: резисторов, конденсаторов, катушек индуктивности. Для цепи на рис. 21 можно записать
Векторной диаграмме токов (рис. 22) для данной цепи соответствует уравнение в комплексной форме
где
Треугольник проводимостей, подобный треугольнику токов, приведен на рис. 23.
Выражение комплексного сопротивления цепи на рис. 21 имеет вид:
23. Активная, реактивная, комплексная и полная проводимость пассивного двухполюсника Независимо от внутренней структуры, состава и параметров элементов двухполюсника, состоящего из произвольным образом включенных элементов R, L, C (рис. 7.4), при действии на его входе напряжения u = Um sin t входной ток i также синусоидален и имеет в общем случае фазовый сдвиг по отношению к напряжению: i = Im sin (t – ). В зависимости от состава цепи и частоты угол лежит в пределах – /2 /2.
Значения полных сопротивлений и проводимости не дают представления о фазовом сдвиге между током и напряжением.
Такую
информацию содержит комплексное
сопротивление двухполюсника
Вещественная и мнимая части комплексного сопротивления представляют его активное R и реактивное X сопротивления: R = z cos ; X = z sin . Поскольку – /2 /2, то активное сопротивление пассивного двухполюсника R 0, а знак реактивного сопротивления X определяется знаком . При > 0, когда напряжение u опережает ток i (рис. 7.5, а,в), X > 0, двухполюсник в целом имеет индуктивный характер, и его можно при данной частоте заменить схемой замещения с последовательным соединением R и X (рис. 7.5, д).
Рис. 7.5 Если < 0, напряжение отстает от тока (рис. 7.5, б,г), X < 0, цепь имеет емкостной характер и приводится к схеме замещения (рис. 7.5, е). Аналогично вводим комплексную проводимость Y
выражаемую через активную G и реактивную B проводимости:
Эти величины также можно рассматривать как элементы схемы замещения двухполюсника (рис. 7.5, ж,з). При перемножении комплексных сопротивления и тока согласно правилам комплексной алгебры получим
Это
равенство и вытекающее из
него
Имеем следующие соотношения между составляющими комплексных сопротивлений и проводимостей:
Активное R и реактивное X сопротивления двухполюсника можно изобразить в виде треугольника, гипотенузой которого является полное сопротивление z (рис. 7.6, а). Аналогичным образом связаны проводимости G, B и y (рис. 7.6, б).
Рис. 7.6 При переходе от эквивалентных сопротивлений к проводимостям воспользуемся формулами:
Аналогично получим и обратные зависимости:
Эти связи используются, в частности, для пересчета параметров при преобразовании последовательной схемы замещения двухполюсника (рис. 7.5, д,е) в параллельную (рис. 7.5, ж,з) и наоборот. Из последних формул следует, что при синусоидальном токе эквивалентные параметры для произвольного двухполюсника R и G не являются обратными друг другу величинами. То же справедливо и в отношении реактивных параметров X и B.
Реактивные
сопротивления и проводимость являются
частотно-зависимыми величинами.
Следовательно, при последовательном
или параллельном соединении
элементов
и
Резонанс напряжений.
Может возникнуть в цепи с последовательным соединением и , рис. 2.20а. Для этой цепи запишем:
Условие резонанса:
откуда
резонансная частота
Резонанс токов.
Возможен
в цепях с параллельным
соединением Для этой цепи запишем уравнение по первому закону Кирхгофа:
Компенсация реактивных проводимостей и реактивных токов:
произойдет
на резонансной частоте
Цепи синусоидального тока при резонансе Резонанс в цепи с последовательно соединенными элементами (резонанс напряжений)
где
В
зависимости от соотношения
величин 1.
В цепи преобладает индуктивность,
т.е.
2. В
цепи преобладает емкость, т.е. 3. Условие резонанса напряжений
При
этом, как следует из (1) и (2), При резонансе напряжений или режимах, близких к нему, ток в цепи резко возрастает. В теоретическом случае при R=0 его величина стремится к бесконечности. Соответственно возрастанию тока увеличиваются напряжения на индуктивном и емкостном элементах, которые могут во много раз превысить величину напряжения источника питания. Пусть,
например, в цепи на рис. 1 Явление резонанса находит полезное применение на практике, в частности в радиотехнике. Однако, если он возникает стихийно, то может привести к аварийным режимам вследствие появления больших перенапряжений и сверхтоков. Физическая сущность резонанса заключается в периодическом обмене энергией между магнитным полем катушки индуктивности и электрическим полем конденсатора, причем сумма энергий полей остается постоянной. Суть
дела не меняется, если в цепи имеется
несколько индуктивных и емкостных
элементов. Действительно, в этом
случае Как показывает анализ уравнения (3), режима резонанса можно добиться путем изменения параметров L и C, а также частоты. На основании (3) для резонансной частоты можно записать
Резонансными
кривыми называются зависимости
тока и напряжения от частоты. В качестве
их примера на рис. 3 приведены типовые
кривые I(f); Важной характеристикой резонансного контура является добротность Q, определяемая отношением напряжения на индуктивном (емкостном) элементе к входному напряжению:
-
и характеризующая “избирательные”
свойства резонансного контура, в
частности его полосу пропускания Другим параметром резонансного контура является характеристическое сопротивление, связанное с добротностью соотношением
или
с учетом (4) и (5) для
При анализе электрических цепей в задачах исследования взаимосвязи между переменными (токами, напряжениями, мощностями и т.п.) двух каких-то ветвей схемы широко используется теория четырехполюсников. Четырехполюсник – это часть схемы произвольной конфигурации, имеющая две пары зажимов (отсюда и произошло его название), обычно называемые входными и выходными. Примерами четырыхполюсника являются трансформатор, усилитель, потенциометр, линия электропередачи и другие электротехнические устройства, у которых можно выделить две пары полюсов. В общем случае четырехполюсники можно разделить на активные, в структуру которых входят источники энергии, и пассивные, ветви которых не содержат источников энергии. Ниже будут рассмотрены элементы теории пассивных четырехполюсников.
Для
записи уравнений четырехполюсника
выделим в произвольной схеме ветвь
с единственным источником энергии и
любую другую ветвь с некоторым
сопротивлением
В
соответствии с принципом компенсации
заменим исходное сопротивление
источником
с напряжением
Решая полученные уравнения (1) и (2) относительно напряжения и тока на первичных зажимах, получим
или
где
Учитывая,
что в соответствии с принципом
взаимности
Уравнения
(3) и (4) представляют собой основные
уравнения четырехполюсника; их также
называют уравнениями четырехполюсника
в А-форме (см. табл. 1). Вообще говоря,
существует шесть форм записи уравнений
пассивного четырехполюсника.
Действительно, четырехполюсник
характеризуется двумя напряжениями
Таблица 1. Формы записи уравнений пассивного четырехполюсника
Если
при перемене местами источника и
приемника энергии их токи не меняются,
то такой четырехполюсник
называется симметричным. Как
видно из сравнения А- и В- форм в табл.
1, это выполняется при Четырехполюсники, не удовлетворяющие данному условию, называются несимметричными. При практическом использовании уравнений четырехполюсника для анализа цепей необходимо знать значения его коэффициентов. Коэффициенты четырехполюсника могут быть определены экспериментальным или расчетным путями. При этом в соответствии с соотношением (5) определение любых трех коэффициентов дает возможность определить и четвертый.
Один
из наиболее удобных экспериментальных
методов определения коэффициентов
четырехполюсника основан на опытах
холостого хода и короткого замыкания
при питании со стороны вторичных
зажимов и опыте холостого хода при
питании со стороны первичных зажимов.
В этом случае при
При
и
при
Решение уравнений (6)-(8) относительно коэффициентов четырехполюсника дает:
При определении коэффициентов четырехполюсника расчетным путем должны быть известны схема соединения и величины сопротивлений четырехполюсника. Как было отмечено ранее, пассивный четырехполюсник характеризуется тремя независимыми постоянными коэффициентами. Следовательно, пассивный четырехполюсник можно представить в виде трехэлементной эквивалентной Т- (рис. 3,а) или П-образной
в силовой электроэнергетике несинусоидальные токи обусловливают в общем случае дополнительные потери мощности, пульсации момента на валу двигателей, вызывают помехи в линиях связи; поэтому здесь необходимо «всеми силами» поддержание синусоидальных режимов; в цепях автоматики и связи, где несинусоидальные токи и напряжения лежат в основе принципа действия электротехнических устройств, задача наоборот заключается в их усилении и передаче с наименьшими искажениями. В общем случае характер изменения величин может быть периодическим, почти периодическим и непериодическим. В данном разделе будут рассматриваться цепи только с периодическими переменными. Периодическими несинусоидальными величинами называются переменные, изменяющиеся во времени по периодическому несинусоидальному закону. Причины возникновения несинусоидальных напряжений и токов могут быть обусловлены или несинусоидальностью источника питания или (и) наличием в цепи хотя бы одного нелинейного элемента. Кроме того, в основе появления несинусоидальных токов могут лежать элементы с периодически изменяющимися параметрами. В качестве примера на рис. 1,а представлена цепь с нелинейным резистором (НР), нелинейная вольт-амперная характеристика (ВАХ) которого обусловливает несинусоидальную форму тока i в цепи при синусоидальном напряжении u на ее входе (см. рис. 1,б).
Характеристики несинусоидальных величин Для характеристики несинусоидальных периодических переменных служат следующие величины и коэффициенты (приведены на примере периодического тока): Максимальное
значение - Действующее
значение - Среднее
по модулю значение - Среднее
за период значение (постоянная
составляющая) - Коэффициент
амплитуды (отношение максимального
значения к действующему) - Коэффициент
формы (отношение действующего значения
к среднему по модулю) - Коэффициент
искажений (отношение действующего
значения первой гармоники к действующему
значению переменной) - Коэффициент
гармоник (отношение действующего
значения высших гармонических к
действующему значению первой гармоники)
-
Разложение периодических несинусоидальных кривых в ряд Фурье Из
математики известно, что всякая
периодическая функция . 27. Электрические фильтры Электрический фильтр – это четырехполюсник, пропускающий из входной цепи в выходную определенныйдиапазон частот сигналов в виде напряжения или тока. Электрические фильтры классифицируются по нескольким группам (табл.5.1):
Таблица 5.1
Основные требования к фильтрам:
Так как фильтр попускает через себя большой диапазон частот, то для достижения эффективной передачи сигнала необходимо иметь согласованный режим во всем диапазоне частот, а значит, повторное сопротивление фильтра не должно быть реактивным.
28. Классический метод расчета переходных процессов Для анализа переходного процесса предварительно следует привести схему к минимальному числу накопителей энергии, исключив параллельные и последовательные соединения однотипных реактивных элементов (индуктивностей или емкостей). Система интегродифференциальных уравнений, составленных в соответствии с законами Кирхгофа или методом контурных токов, может быть сведена путем подстановки к одному дифференциальному уравнению, которое используется для составления характеристического уравнения. Порядок дифференциального, следовательно, и характеристического уравнения зависит от числа реактивных элементов приведенной схемы. Главная трудность в решения задачи классическим методом для уравнений высоких порядков состоит в отыскании корней характеристического уравнения и постоянных интегрирования. Поэтому для решения уравнений порядка выше второго применяют другие методы, в частности операторный метод, основанный на применении преобразования Лапласа и исключающий трудоемкую процедуру отыскания постоянных интегрирования. Для практических целей при анализе переходных процессов в любой схеме классическим методом может быть рекомендован следующий алгоритм.
29. Переходные процессы в цепи с индуктивным элементом Включение цепи с резистором и катушкой на постоянное напряжение
Переходный ток в цепи, изображенной на рис. 5.4, представим в виде i = iу + iсв. 1. До коммутации тока в катушке не было, следовательно, iL(0-) = 0. 2. Установившаяся составляющая тока после коммутации iу = U / R. 3. Свободная составляющая тока для цепи, описываемой дифференциальным уравнением первого порядка iсв = A e-t/τ =A ept , p = - R / L. 4. По начальным условиям определим постоянную интегрирования А и свободную составляющую тока: i(0) = iу(0) + iсв(0); i(0) = iу(0+) + iсв(0-); или 0 = U / R + A; A = -U / R; iсв = -U / R · e-t/τ. Переходный ток получается в виде i = U / R (1 - e-t/τ).
Напряжение на катушке
Кривые изменения токов i, iy, iсв и напряжения на катушке uL показаны на рис. 5.5. При включении рассматриваемого контура под постоянное напряжение ток в нем нарастает от нуля до установившегося значения. Скорость нарастания тока
изменяется по экспоненте с отрицательным показателем. В момент t = 0 эта скорость максимальна и равна U / L [А/с], со временем она падает практически до нуля, процесс выходит на установившийся режим. В первый после коммутации момент t = 0+ ток в цепи еще равен нулю, и напряжение на катушке максимально uL = U, далее оно экспоненциально снижается до нуля. Включение цепи с резистором и катушкой на синусоидальное напряжение
Если напряжение источника цепи (рис. 5.6) u = Umsin(ωt + ψ), то установившийся ток iу = Um / Z sin(ωt + ψ - φ),
где: Свободный ток определяется iсв = A e-t/τ. Суммируя установившуюся и свободную составляющие, получим выражение для переходного тока: i = iу + iсв = Um / Z sin(ωt + ψ - φ) + A e-t/τ.
используя независимые начальные условия при t = 0 i(0-) = i(0+) = 0, находим постоянную интегрирования: A = -Um / Z sin(ψ - φ). Тогда переходный ток:
Зависимости переходного тока от времени при различных значениях разностей ψ - φ показаны на рис. 5.7. Их анализ позволяет сделать следующие выводы.
i = iу = Im sin(ωt) = Um / Z sin(ωt).
30. Переходные процессы в цепи с резистивным и емкостным элементом
Включение цепи с резистором и конденсатором на постоянное напряжение (заряд конденсатора) Из схемы, приведенной на рис. 5.10, следует, что установившаяся составляющая напряжения на конденсаторе uCу = U, а свободная составляющая, очевидно, равна
uCсв = A e-t/τ, τ = RC. Полагаем, что до замыкания ключа конденсатор не был заряжен (Uс(0-) = 0). На основании законов коммутации uC(0-) = uC(0+) = 0, при t = 0; следовательно: uC(0) = uCу(0) + uCсв(0) или 0 = U + A, откуда А = -U. Тогда переходное напряжение на конденсаторе uC = U (1 - e-t/τ), а переходный ток в цепи
Зависимости напряжений и токов от времени показаны на рис. 5.10. Из них видно, что напряжение на конденсаторе возрастает по экспоненциальному закону от нуля до напряжения источника, а ток уменьшается от начального значения до нуля также по экспоненте. Длительность их изменения определяется постоянной времени τ = RC. Здесь как и в п. 5.5.1 время переходного процесса принимается равным t ≈ (3 ÷ 5)τ. Включение цепи с резистором и конденсатором на синусоидальное напряжение
Пусть напряжение источника изменяется по закону u = Um sin(ωt + ψ). Установившаяся составляющая напряжения на конденсаторе (см. рис. 5.11) равна: uCу = -Um XC / Z sin(ωt + ψ – φ – π / 2).
где: Свободная составляющая напряжения на конденсаторе uCсв = A e-t/τ, τ = RC. Переходное напряжение на конденсаторе
Полагая, что uC(0-) = 0, для постоянной интегрирования получим
Окончательно напряжение на конденсаторе можно записать в виде
Ток в цепи
Зависимости переходного напряжения на конденсаторе от времени при различных значениях разностей ψ - φ показаны на рис. 5.12. Их анализ позволяет сделать следующие выводы. Если в момент включения мгновенное значение установившегося напряжение на конденсаторе равно нулю (ψ – φ – π / 2 = 0), то и свободная составляющая напряжения равна нулю. В цепи сразу устанавливается режим (рис. 5.12 а). Если в момент включения мгновенное значение установившегося напряжение на конденсаторе имеет наибольшее значение (ψ – φ – π / 2 = π / 2), то переходное напряжение достигает максимального значения приблизительно через половину периода и может приблизиться к удвоенной амплитуде установившегося напряжения, но не превысит его (рис. 5.12 в). 31. Нелинейные электрические цепи и методы их расчета Нелинейные электрические цепи постоянного тока Нелинейные свойства таких цепей определяет наличие в них нелинейных резисторов. В
связи с отсутствием у нелинейных
резисторов прямой пропорциональности
между напряжением и током их нельзя
охарактеризовать одним параметром
(одним значением
Параметры нелинейных резисторов В зависимости от условий работы нелинейного резистора и характера задачи различают статическое, дифференциальное и динамическое сопротивления. Если нелинейный элемент является безынерционным, то он характеризуется первыми двумя из перечисленных параметров. Статическое сопротивление равно отношению напряжения на резистивном элементе к протекающему через него току. В частности для точки 1 ВАХ на рис. 1
Под дифференциальным сопротивлением понимается отношение бесконечно малого приращения напряжения к соответствующему приращению тока
Следует
отметить, что у неуправляемого
нелинейного резистора
В случае инерционного нелинейного резистора вводится понятие динамического сопротивления
определяемого
по динамической ВАХ. В зависимости
от скорости изменения переменной,
например тока, может меняться не
только величина, но и знак
Методы расчета нелинейных электрических цепей постоянного тока Электрическое состояние нелинейных цепей описывается на основании законов Кирхгофа, которые имеют общий характер. При этом следует помнить, что для нелинейных цепей принцип наложения неприменим. В этой связи методы расчета, разработанные для линейных схем на основе законов Кирхгофа и принципа наложения, в общем случае не распространяются на нелинейные цепи. Общих методов расчета нелинейных цепей не существует. Известные приемы и способы имеют различные возможности и области применения. В общем случае при анализе нелинейной цепи описывающая ее система нелинейных уравнений может быть решена следующими методами:
Графические методы расчета При использовании этих методов задача решается путем графических построений на плоскости. При этом характеристики всех ветвей цепи следует записать в функции одного общего аргумента. Благодаря этому система уравнений сводится к одному нелинейному уравнению с одним неизвестным. Формально при расчете различают цепи с последовательным, параллельным и смешанным соединениями. а) Цепи с последовательным соединением резистивных элементов. При
последовательном соединении нелинейных
резисторов в качестве общего аргумента
принимается ток, протекающий через
последовательно соединенные элементы.
Расчет проводится в следующей
последовательности. По заданным ВАХ
Применение указанной методики иллюстрируют графические построения на рис. 2,б, соответствующие цепи на рис. 2,а.
Графическое
решение для последовательной нелинейной
цепи с двумя резистивными элементами
может быть проведено и другим методом
–
методом пересечений. В
этом случае один из нелинейных
резисторов, например, с ВАХ
Использование данного метода наиболее рационально при последовательном соединении линейного и нелинейного резисторов. В этом случае линейный резистор принимается за внутреннее сопротивление источника, и линейная ВАХ последнего строится по двум точкам. б) Цепи с параллельным соединением резистивных элементов. При
параллельном соединении нелинейных
резисторов в качестве общего аргумента
принимается напряжение, приложенное
к параллельно соединенным элементам.
Расчет проводится в следующей
последовательности. По заданным ВАХ
Использование данной методики иллюстрируют графические построения на рис. 4,б, соответствующие цепи на рис. 4,а.
в) Цепи с последовательно-параллельным (смешанным) соединением резистивных элементов. 1. Расчет таких цепей производится в следующей последовательности: Исходная схема сводится к цепи с последовательным соединением резисторов, для чего строится результирующая ВАХ параллельно соединенных элементов, как это показано в пункте б). 2. Проводится расчет полученной схемы с последовательным соединением резистивных элементов (см. пункт а), на основании которого затем определяются токи в исходных параллельных ветвях.
Метод двух узлов Для цепей, содержащих два узла или сводящихся к таковым, можно применять метод двух узлов. При полностью графическом способе реализации метода он заключается в следующем: Строятся
графики зависимостей
Определяется,
в какой точке графически реализуется
первый закон Кирхгофа
Метод двух узлов может быть реализован и в другом варианте, отличающемся от изложенного выше меньшим числом графических построений. В качестве примера рассмотрим цепь на рис. 5. Для нее выражаем напряжения на резистивных элементах в функции :
Далее
задаемся током, протекающим через
один из резисторов, например во второй
ветви
Таблица 1. Таблица результатов расчета методом двух узлов
Алгебраическая
сумма токов в соответствии с первым
законом Кирхгофа должна равнять нулю,
поэтому получающаяся в последней
колонке табл. 1 величина
В
осях
32. Основные характеристики электроизмерительных приборов Главная черта электроизмерительного прибора это степень точности, с которой им можно измерять. На классы точности электроизмерительные приборы делят по степени точности измерения. Класс точности обуславливается в зависимости от допустимой меры погрешности прибора, вызванной устройством прибора. Погрешность вполне может допускаться также ошибочными действиями человека при снятии показаний прибора, естественно, такая погрешность абсолютно не влияет на класс точности прибора, а приходится лишь характеристикой степени точности проделанных измерений. Абсолютной погрешностью называют измеряемую величину между действительным значением прибора и разностью показанием прибора:
А – показание прибора; Ад – действительное значение величины (показание образцового прибора). Разность между показанием прибора и действительным значением измеряемой величины называют поправкой показаний прибора:
Поправка прибора равна абсолютной погрешности прибора, взятой с противоположным знаком:
Действительное значение величины равно алгебраической сумме показания прибора и поправки его:
Выраженное в % отношение измеряемой величины к значению абсолютной погрешности прибора, которое соответствует конечной отметке шкалы этого прибора, называют относительной приведенной погрешностью прибора:
Главная предельно допустимая приведенная погрешность прибора обуславливает класс точности этого прибора. Классы точности: 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Так, приборы класса точности 2,5 имеют допустимую приведенную погрешность 2,5% и т.д. Приборы класса точности 0,05 наиболее точные. Сведения о погрешности прибора как правило указывают на его шкале, а также в паспорте прибора. Они позволяют осуществить подходящий правильный выбор в зависимости от условий эксплуатации и определённо помогают правильно использовать прибор при выполнении измерений.
Есть и ряд других условных обозначений на шкале прибора. Это степень его защищенности от внешних магнитных полей – маркируют римскими цифрами I, II, III, IV. Чем она меньше, тем определённо прибор более хорошо защищён от действия внешних магнитных полей. При соответствующих температурах и влажности условия работы прибора обозначаются на шкале буквами: А – норма при температуре окружающего воздуха от +10 до +35 °С и относительной влажности до 80%; Б – норма при температуре окружающего воз¬духа от -20 до +50 °С и относительной влажности до 80%; В – норма при температуре окружающего воздуха от -40 до +60 °С и относительной влажности до 98%. Также на шкале прибора указывают:
33. Принцип действия и основные параметры аналоговых приборов ( магнитоэлектрических, электромагнитных ) Магнитоэлектрические приборы Устройство и принцип действия. Магнитоэлектрический измерительный механизм (рис. 321,а) выполнен в виде постоянного магнита 1, снабженного полюсными наконечниками 2, между которыми укреплен стальной сердечник 3. В кольцеобразном воздушном зазоре, образованном полюсными наконечниками и сердечником, помещена подвижная катушка 5, намотанная на алюминиевый каркас 6 (рис. 321,б). Катушка выполнена из очень тонкого провода и укреплена на оси, связанной со стрелкой спиральными пружинами 4 или растяжками. Через эти же пружины или растяжки осуществляется подвод тока к катушке. При прохождении тока I по катушке на каждый из ее проводников будет действовать электромагнитная сила. Суммарное действие всех электромагнитных сил создает вращающий момент М, стремящийся повернуть катушку и связанную с ней стрелку при-
бора на некоторый угол ?. Так как индукция В магнитного поля, создаваемого постоянным магнитом, неизменна и не зависит от тока I, то M = c1I (93) где c1 — постоянная величина, зависящая от конструктивных параметров данного прибора (числа витков катушки, ее размеров, индукции В в воздушном зазоре). Повороту подвижной части измерительного механизма препятствует противодействующий момент Мпр, создаваемый спиральными пружинами или растяжками. Этот момент пропорционален углу закручивания, т. е. углу поворота ? подвижной части; при этом Мпр= c2? (94) где c2 — постоянная величина, зависящая от жесткости спиральных пружин или растяжек. Поворот подвижной части измерительного механизма и стрелки будет продолжаться до тех пор, пока вращающий момент М, создаваемый током I, не уравновесится противодействующим моментом Мпр. В момент равновесия М = Мпр, откуда получим: ?= (c1/c2) I = kI (95) Следовательно, угол поворота а подвижной части пропорционален измеряемому току I. Поэтому магнитоэлектрические приборы имеют равномерную шкалу. Постоянная величина к называется чувствительностью прибора, она характеризуется углом поворота стрелки в градусах или в делениях шкалы, приходящимся на единицу изменения измеряемой величины. Величина, обратная чувствительности, c=1/к называется постоянной прибора, или ценой деления.Если умножить отсчет по шкале на цену деления прибора с, то можно определить значение измеряемой величины. Для устранения колебаний подвижной системы прибора при переходе стрелки из одного положения в другое электроизмерительные приборы снабжают воздушными или магнитно-индукционными демпферами. Воздушный демпфер (рис. 322, а) выполнен в виде цилиндрической камеры, внутри которой перемещается крыло 1 в виде поршня, связанного с подвижной системой. При перемещении подвижной части происходит торможение движущегося в камере 2 крыла, и колебания подвижной части быстро затухают. Магнитно-индукционный демпфер (рис. 322, б) выполнен в виде неподвижного постоянного магнита 3, который при повороте подвижной системы прибора индуцирует вихревые токи в металлическом (алюминиевом) секторе 4, установленном на оси прибора. Взаимодействие этих токов с магнитом создает согласно правилу Ленца силу, тормозящую подвижную систему и обеспечивающую быстрое затухание колебаний стрелки. В магнитоэлектрических приборах роль демпфера выполняет алюминиевый каркас 6 катушки (см. рис. 321,б). При повороте подвижной части прибора изменяется магнитный поток, пронизывающий каркас катушки. Благодаря этому в каркасе индуцируются вихревые токи, взаимодействие которых с магнитным полем магнита создает тормозной момент, обеспечивающий быстрое успокоение подвижной части. Для того чтобы любой электроизмерительный прибор обеспечил требуемую точность измерений, необходимо, чтобы отклонение подвижной системы прибора определялось только вращающим моментом, создаваемым катушкой, и противодействующим усилием пружины. Для устранения влияния силы тяжести, создающей погрешности при измерениях, подвижную систему прибора (рис. 323) уравновешивают противовесами 5 (рис. 323, а), представляющими собой стержни с перемещающимися по ним грузиками. Для умень-
шения влияния трения оси приборов снабжают тщательно отполированными стальными наконечниками 1, выполненными из материала с высокой износостойкостью (закаленная сталь, вольфрамо-молибденовый сплав и пр.). Наконечники вращаются в подпятниках 4, выполняемых с вкладышами 2 из корунда, агата, рубина и т. п. Зазоры между наконечниками и подпятником регулируются стопорным винтом 3. Электроизмерительные приборы обычно снабжают корректором — приспособлением, позволяющим устанавливать стрелку в нулевое положение. Корректор состоит из винта 6, выходящего из корпуса, и поводка 7, при помощи которых можно смещать на некоторое расстояние точку закрепления спиральной пружины 8, создающей противодействующее усилие. В большинстве современных электроизмерительных приборов подвижная часть 11 подвешивается на двух растяжках 10 — упругих металлических лентах, которые служат для подвода тока к катушке прибора и одновременно создают противодействующий момент (рис. 323,б). Растяжки прикреплены к двум плоским пружинам 9 и 12, расположенным во взаимно перпендикулярных плоскостях. Кроме рассмотренного выше измерительного механизма с внешним (по отношению к катушке) постоянным П-образным магнитом, существуют механизмы с магнитами другой формы (цилиндрической, в виде призмы, а также с внутрирамочными неподвижными и подвижными магнитами). Применение прибора. Приборы магнитоэлектрической системы применяют для измерения тока и напряжения в электрических цепях постоянного тока. В частности, на э.п.с. и тепловозах их используют в качестве амперметров и вольтметров. В амперметрах и вольтметрах катушка прибора имеет различное сопротивление и включается по различным схемам (см. § 101). Для уменьшения проходящего по катушке тока и компенсации влияния температуры на показания прибора в вольтметрах последовательно с катушкой включают добавочный резистор, который обычно встраивается в корпус прибора. Сопротивление этого резистора значительно больше сопротивления катушки, и он выполнен из материала, электрическое сопротивление которого весьма мало зависит от температуры (константан, манганин и пр.). В амперметрах параллельно катушке прибора часто включают образцовый резистор, называемый шунтом. Сопротивление шунта значительно меньше сопротивления катушки прибора, вследствие чего измеряемый ток в основном проходит по шунту. Шунты и добавочные резисторы служат для расширения пределов измерения приборов. Из принципа действия магнитоэлектрического прибора следует, что направление отклонения его стрелки зависит от направления тока I, проходящего по катушке. Следовательно, при включении этих приборов в цепь постоянного тока должна быть соблюдена правильная полярность, при которой стрелка отклоняется в требуемую сторону. Для переменного тока магнитоэлектрические приборы непригодны, так как при питании катушки переменным током среднее значение создаваемого ею вращающего момента равно нулю и стрелка прибора будет стоять на нуле, испытывая чуть заметные колебания. Достоинством приборов магнитоэлектрической системы являются равномерность шкалы, высокая точность и независимость показаний от посторонних магнитных полей. К недостаткам их относятся непригодность для измерения переменного тока, необходимость соблюдения полярности при включении и чувствительность к перегрузкам (при перегрузке тонкая проволока катушки и спиральные пружины, подводящие к ней ток, могут сгореть). Электромагнитные приборы Электромагнитные приборы и их Устройство. Принцип работы приборов этой системы основан на взаимодействии магнитного поля, создаваемого катушкой 1 со стальным сердечником 3, помещенным в поле этой катушки. Электромагнитный измерительный механизм выполняют с плоской (рис. 324, а) или круглой (рис. 324,б) катушкой. В приборах с плоской катушкой сердечник установлен на оси, несущей стрелку. При прохождении тока по катушке 1 сердечник 3 будет намагничиваться и втягиваться в катушку, поворачивая ось и стрелку. Повороту оси препятствует спиральная пружина 2. Когда усилие, создаваемое пружиной, уравновесит усилие, созданное катушкой, подвижная система прибора остановится и стрелка зафиксирует на шкале определенный ток. Вращающий момент, воздействующий на подвижную часть прибора, пропорционален силе притяжения F электромагнита, под действием которой сердечник втягивается в катушку. Сила притя-
жения F, как было показано в § 93, пропорциональна квадрату индукции в, создаваемой магнитным полем катушки; следовательно, она пропорциональна квадрату тока I в катушке. Поэтому вращающий момент M = c1I2 (96) где c1 — постоянная величина, зависящая от конструктивных параметров прибора (числа витков и размеров катушки, материала и формы сердечника) и положения сердечника относительно катушки. При втягивании сердечника в катушку вращающий момент М изменяется пропорционально I2. Под действием момента М подвижная часть прибора будет поворачиваться до тех пор, пока этот момент не будет уравновешен противодействующим моментом Mпр = c2?, созданным пружинами или растяжками. В момент равновесия М = Mпр, откуда α= (c1/c2) I2 = kI2 (97) где к — постоянная величина. Следовательно, в приборах с электромагнитным измерительным механизмом угол поворота а подвижной части и стрелки пропорционален квадрату тока, проходящего по катушке. Поэтому такой прибор имеет неравномерную (квадратичную) шкалу. Для сглаживания этой неравномерности сердечнику придается особая лепестко-образная форма, вследствие чего форма магнитного поля и усилие, создаваемое катушкой, изменяются по мере втягивания сердечника. Устранение колебаний подвижной системы прибора при переходе стрелки из одного положения в другое осуществляется демпфером 5. В приборах с круглой катушкой подвижная система поворачивается в результате взаимодействия двух стальных намагничиваю-
щихся пластинок 3, расположенных внутри катушки 1. Одна из них укреплена на оси прибора, а другая — на внутренней поверхности каркаса катушки. При прохождении тока по катушке пластины намагничиваются, и их одноименные полюсы оказываются расположенными друг против друга. Между ними возникают силы отталкивания и создается вращающий момент, поворачивающий ось со стрелкой 4. Применение. Электромагнитные приборы используют, главным образом, для измерения тока и напряжения в промышленных установках переменного тока. При периодическом изменении тока, проходящего через прибор, усилие, создаваемое его катушкой, не будет изменяться по направлению, так как оно пропорционально квадрату тока. Угол отклонения стрелки определяется некоторым средним усилием F, значение которого пропорционально среднему квадратичному значению тока или напряжения. Следовательно, электромагнитные приборы в цепях переменного тока измеряют действующие значения тока или напряжения. Катушка при измерениях может быть включена в электрическую цепь последовательно или параллельно двум точкам, между которыми действует некоторое напряжение. В первом случае прибор будет работать в качестве амперметра, во втором — в качестве вольтметра. Достоинством приборов электромагнитной системы являются простота и надежность конструкции, невысокая стоимость, стойкость к перегрузкам и пригодность для измерений в цепях переменного и постоянного тока. К недостаткам относятся невысокая точность, малая чувствительность, неравномерность шкалы и зависимость показаний от внешних магнитных полей и частоты переменного тока. Астатические приборы. Катушки электромагнитных приборов создают относительно слабое магнитное поле, так как силовые линии этого поля проходят в основном по воздуху. Поэтому такие приборы весьма чувствительны к влиянию внешних магнитных полей. Для защиты от этих влияний электромагнитные приборы окружают стальными экранами или выполняют астатическими. В астатическом приборе имеются две плоские катушки 1 и два сердечника 2, расположенные на общей оси (рис. 325). Обмотки катушек включают так, чтобы направления их магнитных потоков Ф1 и Ф2 были противоположны. Вращающие моменты действуют на подвижную систему прибора в одинаковом направлении. Поэтому внешний магнитный поток Фвн будет усиливать поле одной катушки и ослаблять поле другой; создаваемый же ими суммарный вращающий момент будет оставаться неизменным. Электродинамические и ферродинамические приборы Устройство и применение электродинамического прибора. Работа электродинамического прибора основана на взаимодействии двух катушек, обтекаемых электрическим током. Электродинамический измерительный механизм (рис. 326, а) состоит из двух катушек: неподвижной 2 и расположенной внутри нее подвижной 1. Подвижная катушка 1 связана с осью прибора со стрелкой и с двумя спиральными пружинами 4 (или растяжками), которые служат для создания противодействующего момента и подвода тока к подвижной катушке 1. В приборе применяется демпфер 3, аналогичный ранее рассмотренному. При прохождении по катушкам токов I1 и I2 возникают электродинамические силы F (рис. 326,б), которые стремятся повернуть подвижную катушку относительно неподвижной на некоторый угол. Вращающий момент, действующий на подвижную катушку, M = c1I1I2 (98) где с1 — постоянная величина, зависящая от параметров катушек (числа витков и размеров), их формы и взаимного расположения. Повороту подвижной катушки противодействует момент Мпр = = с2?. В момент равновесия М = Мпр, откуда ? = (c1/c2) I1I2 = kI1I2 (99) где к — постоянная величина. При переменном токе мгновенное значение вращающего момента М пропорционально произведению мгновенных значений токов i1 и i2, проходящих по катушкам. Средний же за период вращающий момент Mcp = c1I1I2 cos? (100) где I1 и I2 — действующие значения токов i1 и i2; ? — угол сдвига фаз между ними. Поэтому при переменном токе ? = кI1I2 cos?. Значение вращающего момента М, созданного катушками электродинамического прибора, а следовательно, и угол поворота стрелки ? пропорциональны произведению проходящих по катушкам токов I1 и I2. Поэтому в зависимости от схемы включения катушек прибор может быть использован в качестве амперметра, вольтметра и ваттметра. При включении обеих катушек прибора последовательно в цепь измеряемого тока (рис. 327,а) прибор будет работать в качестве амперметра; при подключении катушек к двум точкам (рис. 327,б), между которыми действует подлежащее измерению напряжение,
прибор будет работать в качестве вольтметра. При подключении же одной катушки последовательно, а другой параллельно приемнику электроэнергии (рис. 327, в) угол отклонения стрелки будет пропорционален произведению тока I и напряжения U, т. е. мощности Р=UI и, следовательно, прибор будет работать в качестве ваттметра и измерять мощность, получаемую приемником. При переменном токе и включении катушек по схеме (см. рис. 327, б) угол сдвига фаз ? между токами 11 и I2 равен углу сдвига фаз <р между током I и напряжением U. Поэтому ? = kUI cos? = kP (101) т. е. угол поворота стрелки пропорционален измеряемой мощности. Достоинствами электродинамических приборов являются пригодность для измерения постоянного и переменного тока, равномерность шкалы у ваттметров и относительно высокая точность по сравнению с другими приборами, предназначенными для измерений в цепях переменного тока. К недостаткам относится сильное влияние внешних магнитных полей на точность измерений, чувствительность к перегрузкам и относительно высокая стоимость. Электродинамические приборы применяют обычно в качестве точных лабораторных приборов, а также в качестве ваттметров и счетчиков электрической энергии в цепях постоянного тока.
Устройство и применение ферродинамических приборов. Работа фер-родинамических приборов основана на том же принципе, что и приборов электродинамической системы. Для усиления магнитного поля в ферродинамическом измерительном механизме применен магнитопровод из ферромагнитного материала. Неподвижная катушка 2 (рис. 328) размещается на полюсах ферромагнитного сердечника 4, а подвижная 3 поворачивается так же, как и в приборах магнитоэлектрической системы,— в воздушном зазоре между полюсами 1 и неподвижным цилиндрическим сердечником 5. При такой конструкции приборы защищены от влияния внешних магнитных полей. Кроме того, увеличиваются магнитные потоки, создаваемые катушками, и возрастает вращающий момент, действующий на подвижную систему. Ферродинамические приборы используют в качестве щитовых амперметров, ваттметров и вольтметров, работающих в условиях тряски и вибраций (например, на э. п. с. переменного тока). Кроме того, их применяют в качестве самопишущих приборов, так как они имеют значительный вращающий момент, преодолевающий трение в записывающих устройствах. Индукционные приборы Устройство. Индукционный прибор состоит из двух неподвижных электромагнитов 2 и 3 (рис. 329) и подвижного алюминиевого диска 4, укрепленного на одной оси со стрелкой. При прохождении переменных токов I1 и I2 по катушкам электромагнитов создаются два магнитных потока Ф1 и Ф2, сдвинутых один относительно другого по фазе, которые пронизывают диск. Эти потоки при своем изменении индуцируют в диске вихревые токи Iв1 и Iв2. В результате взаимодействия вихревых токов с магнитными полями обоих электромагнитов (тока Iв1 с потоком Ф2и тока Iв2 с потоком Ф1) возникает вращающий момент М, под влияниеВм которого происходит поворот подвижной части прибора. Противодействующий момент в вольтметрах, амперметрах и ваттметрах создается спиральной пружиной 1 или растяжками. Среднее за период значение вращающего момента М пропорционально произведению действующих значений магнитных потоков Ф1 и Ф2 и синусу угла сдвига фаз ? между этими потоками: M = c1?1?2 sin? (102) где c1 — постоянная для прибора величина.
Чтобы получить наибольшее значение вращающего момента, угол сдвига фаз между потоками устанавливают 90° путем включения в цепи катушек дополнительных активных и реактивных сопротивлений. При этом условии средний вращающий момент в вольтметрах и амперметрах будет пропорционален произведению действующих значений токов I1 и I2, протекающих по катушкам электромагнитов. Этой величиной будет определяться также и угол поворота стрелки: ? = kI1I2 (103) В ваттметрах ? = kUI cos ? = kP, так как ток I1 пропорционален току I в цепи, I2 — напряжению U, а угол ? равен углу 90° — ?. Применение. Индукционные приборы, так же как и электродинамические, могут быть использованы в качестве амперметра, вольтметра и ваттметра. Катушки электромагнитов включаются в этих случаях так же, как и катушки электродинамического прибора (см. рис. 327). Достоинством индукционных приборов являются высокая стойкость к перегрузкам, большой вращающий момент и малая чувствительность к внешним магнитным полям. К недостаткам относятся сравнительно невысокая точность и зависимость показаний от частоты переменного тока и температурных влияний. Индукционные приборы используют, главным образом, в качестве ваттметров и счетчиков электрической энергии и в промышленных установках и на электровозах переменного тока. 34. Цифровые электроизмерительные приборы (на примере вольтметра) Цифровые электроизмерительные приборы благодаря своим свойствам получили широкое распространение в электронной аппаратуре. Сферы применения цифровых измерителей крайне разнообразны. Их применяют для измерения силы тока, напряжения постоянного и переменного тока, частоты переменного тока, мощности и электроэнергии. Соответственно в качестве измерителей применяются амперметры, вольтметры, частотомеры и ваттметры. Различаются они по габаритам, способу исполнения, пределам измерения и классу точности. Немаловажное внимание уделяют также и безопасности применения цифровых электроизмерительных приборов и защите их от перегрузок. Принцип действия цифровых вольтметров и амперметров состоит в преобразовании аналогового сигнала в импульсы цифрового кода, которые преобразуется в десятичный код, отображаемый на табло. Для преобразования аналогового сигнала используют аналого-цифровой преобразователь, представляющий собой сложную электронную схему, собранную на цифровых микросхемах. Цифровой вольтметр, амперметр и другие измерители обладают рядом достоинств, благодаря которым они со временем вытеснили стрелочные измерительные приборы. К таким достоинствам относится их компактность, малая масса и отсутствие механических движущихся деталей, что позволяет применять цифровые приборы для измерения электрических величин в условиях механической тряски и сильной вибрации. Так же электронные приборы оказываются малочувствительны к небольшим ударам, в то время как стрелочные приборы необходимо оберегать от механических воздействий. Например, цифровой частотомер, измеряющий частоту колебаний механической системы, может располагаться в непосредственной близости от механизмов. Расположение цифровых приборов может быть осуществлено в зависимости от конкретных условий применения и работа приборов не зависит от их ориентации. Например, цифровой вольтметр может располагаться как на горизонтальном или вертикальном измерительном щите, так и на щите измерителей, расположенном под любым углом, позволяющим легко и быстро считывать показания с цифровой шкалы. Показания приборов так же легко передавать в цифровом виде на устройство считывания и записи, что позволяет отслеживать изменения величин в автоматическом режиме без присутствия оператора. Очень существенное свойство цифровых измерителей состоит в их точности. Погрешность измерений может составлять десятые, и даже сотые доли процента, в то время как у стрелочных приборов максимальная относительная погрешность даже у высокоточных аппаратов редко достигает менее одного процента. Неоспоримым преимуществом, которым обладает цифровой амперметри вольтметр , является возможность работы аппаратов в широком диапазоне влажности, атмосферного давления и температур. Это позволяет применять цифровые устройства для измерения на открытом воздухе, в подвальных помещениях и в других сложных атмосферных условиях. Применение шунтов, дополнительных сопротивлений позволяет существенно увеличить диапазон измеряемых электрических величин. Цифровые приборы позволяют измерять крайне малые токи от нескольких мкА и большие токи потребления мощных установок вплоть до нескольких десятков кА. Несмотря на эти достоинства цифровой частотомер, амперметр и вольтметр имеют и недостатки. В случае постоянного и быстрого изменения измеряемых параметров по абсолютной величине считать показания с цифрового прибора оказывается невозможным, в этом случае для измерений применяют стрелочные приборы, по шкале которых отследить пределы колебаний величины оказывается проще. Кроме того цифровой вольтметр и другой прибор имеет сложную электронную схему и сложен как в ремонте, так и в настройках. Следовательно, самостоятельный ремонт и настройка цифровых измерителей тока крайне нежелательны и требуется обращение в специализированные мастерские. Несмотря на эти качества приборов, они получили распространенное применение на станциях техобслуживания, электростанциях как стационарных, так и передвижных, в измерительных лабораториях, мастерских по ремонту цифровой аппаратуры.
35.Способы измерения электрических величин (напряжений, токов и др.) Нередко выполняя многие производственные работы определённо нужно будет измерять различные электрические величины. В каждом таком конкретном случае необходимо выбирать требующийся прибор в зависимости от соответствующих действий по измерению. Тем не менее, имеется ряд правил, которые необходимо хорошо осмыслить, запомнить и использовать в выполнении любых работ, связанных с измерением электрических величин. Проанализируем эти правила. В первую очередь при измерении электрических величин крайне важно строго соблюдать правила техники безопасности. Выполнять измерения и подготавливать приборы нужно в следующем порядке:
Измерение силы тока При помощи амперметра замеряют силу тока. Включают амперметр в цепь последовательно с электроприемниками. Он имеет электрическое сопротивление, значительно меньше сопротивления цепи, в которую его включают, от этого он существенно не изменяет силу тока в этой цепи. Одним и тем же амперметром магнитоэлектрической системы, возможно, замерять силу тока в различных пределах, если к нему подключить шунт. Шунт – проводник, имеющий очень малое сопротивление. Также шунты вполне могут быть встроены внутрь корпуса амперметра, у этих приборов на корпусе установлен переключатель пределов измерения. Если же шунт приложен к прибору, то его подсоединяют к зажимам амперметра параллельно. В таком случае для замера силы тока в цепи сначала нужно определить цену деления шкалы, учитывая значение силы тока, на которую рассчитан шунт. Измерение напряжения При помощи вольтметра измеряют напряжение. Включают вольтметр в цепь параллельно тому участку цепи, на котором производят замер напряжение. Вольтметр имеет электрическое сопротивление, сравнительно больше сопротивления цепи, в которую его включают, от этого он приметно не изменяет напряжения в цепи. Добавочные резисторы используют для расширения пределов измерения данным вольтметром. Добавочный резистор – это проводник, обладающий значительным сопротивлением и намотанный в виде катушки. Добавочный резистор также имеет возможность быть установленным внутри корпуса прибора, у этих вольтметров на корпусе существует переключатель пределов измерения. Если же добавочный резистор приложен к прибору отдельно, то его присоединение осуществляется последовательно к вольтметру. На этот случай следует перед замером напряжения в цепи определить цену деления шкалы. Измерение мощности электрического тока При помощи ваттметра измеряют мощность электрического тока. Рассмотрим включение ваттметра. Один из выводов токовой обмотки должен быть присоединен к одному из выводов обмотки напряжения. Такие выводы присоединены к зажимам прибора. Мощность в цепях переменного тока, а также в цепях постоянного тока при отсутствии в них электрических приемников с обмотками и конденсаторов, к примеру, двигателей, можно замерить также косвенным методом: при помощи амперметра и вольтметра. Измерение работы электрического тока Как мы знаем с помощью счётчика электрической энергии измеряют расход электрической энергии. Любой счётчик электроэнергии рассчитан на номинальные значения силы тока и напряжения, которые обозначены в паспорте, а также указаны на его шкале под крышкой. Более того, характеризуется счетчик так называемой номинальной постоянной. Она равна численно электрической энергии, приходящейся на один оборот диска счётчика. Например, на шкале счетчика указано 1 кВт/ч – 1250 оборотов диска. Это значит, что номинальная постоянная этого счётчика электрической энергии равна:
На наличие исправного состояния счётчик проверяют следующим образом: обмотку напряжения подключают к источнику тока, его напряжение не должно превышать 110% номинального напряжения счетчика, а токовую обмотку нужно оставить в разомкнутом состоянии, то есть как холостой ход – при этом диск счетчика вращаться не должен; Чувствительность счетчика определяют подключением его в цепь так, чтобы по токовой обмотке проходил ток, который не должен превышать 2% номинальной силы тока – диск счётчика при этом должен вращаться. Поверку счетчика выполняют с помощью образцовых приборов: вольтметра, амперметра и секундомера. 36 .Способы измерения неэлектрических величин ( температуры, освещенности и др.) Принципы измерения неэлектрических величин. В современной технике широко применяются измерения неэлектрических величин (температуры, давления, усилий и пр.) электрическими методами. В большинстве случаев такие измерения сводятся к тому, что неэлектрическая величина преобразуется в зависимую от нее электрическую величину (например, сопротивление, ток, напряжение, индуктивность, емкость и пр.), измеряя которую, получают возможность определить искомую неэлектрическую величину. Устройство, осуществляющее преобразование неэлектрической величины в электрическую, называется датчиком. Датчики делятся на две основные группы: параметрические и генераторные. В параметрических датчиках неэлектрическая величина вызывает изменение какого-либо электрического или магнитного параметра: сопротивления, индуктивности, емкости, магнитной проницаемости и пр. В зависимости от принципа действия эти датчики подразделяются на датчики сопротивления, индуктивные, емкостные и др. В генераторных датчиках неэлектрическая величина вызывает появление э. д. с. К этим датчикам относятся индукционные, термоэлектрические, пьезоэлектрические и пр. Устройства для измерения различных неэлектрических величин электрическими методами широко применяют на э. п. с. и тепловозах. Такие устройства состоят из датчиков, какого-либо электроизмерительного прибора (гальванометра, милливольтметра, миллиамперметра, логометра и т. д.) и промежуточного звена, которое может включать в себя электрический мост, усилитель, выпрямитель, стабилизатор и др. Электрические термометры сопротивления. Для контроля температуры воды, охлаждающей дизель, применяют электрические термометры, датчиком 3 которых (рис. 346) служат терморезисторы (термисторы). Термисторы выполняют из полупроводниковых материалов. Для предохранения от внешних воздействий датчик заключен в защитную арматуру. Указателем 1 служит логометр. Датчик 3 (R1) включается в одно из плеч неуравновешенного моста 2, три остальных плеча моста образуют резисторы сопротивлениями R1, R2 и R3. Катушки логометра включаются в измерительную диагональ моста последовательно с резистором сопротивлением R4. Терморезисторы имеют значительный разброс в характеристике зависимости сопротивления от температуры. Поэтому для получения требуемой градуировки шкалы прибора приходится применять дополнительные добавочные и подгоночные резисторы сопротивлениями R8 и R9. С помощью этих резисторов осущест-
Рис. 346. Принципиальная схема электрического термометра с терморезисторным датчиком вляют уравновешивание моста при начальной измеряемой температуре (градуируют нулевую точку шкалы). Применение логометра в качестве указателя обеспечивает независимость показаний прибора при колебаниях питающего напряжения. Для уменьшения погрешности, обусловленной влиянием сопротивления проводов, соединяющих датчик с указателем, применено соединение их тремя проводами. Если бы они соединялись двумя проводами, подключенными к точкам Л и С моста, то сопротивления этих проводов складывались с сопротивлением датчика Rt и это создавало бы погрешность измерения. При наличии же трех соединительных проводов питание подается в точки а и С, в результате чего сопротивление R’л одного из проводов складывается с сопротивлением датчика, а сопротивление R”л другого провода — с сопротивлением R8. При этом в два плеча моста добавляются одинаковые сопротивления R’л и R”л, и ток в измерительной диагонали практически не будет зависеть от изменения сопротивления соединительных проводов. Резистор с сопротивлением R5 обеспечивает уменьшение напряжения, подаваемого на измерительный мост, до установленного для данного прибора значения. Для компенсации температурной погрешности, которую вносит изменение сопротивления катушек логометра при изменении окружающей температуры, последовательно с катушками включены терморезисторы Rt1 и Rt2. При увеличении температуры сопротивление медного провода катушек увеличивается, а терморезисторов Rt1 и Rt2 — уменьшается, в результате чего суммарное сопротивление катушки и терморезисторов остается приблизительно постоянным. Для более точной подгонки суммарного сопротивления параллельно терморезисторам включают резисторы сопротивлениями R6 и R7. Резисторы сопротивлениями R1, R2, R3, R4 и R5 изготовляют из манганина, электрическое сопротивление которого мало меняется при изменении температуры, поэтому вводить температурную компенсацию изменения сопротивления этих резисторов не требуется. Датчик помещают в среду, где требуется измерить температуру (например, в воду, циркулирующую в системе охлаждения дизеля). При повышении температуры воды нарушается равновесие моста и изменяется ток в его измерительной диагонали, куда включен указатель. Шкала указателя градуируется непосредственно в °С. В логометрах подвижная часть при выключенном питании занимает произвольное положение. Поэтому в данном приборе применено принудительное возвращение стрелки в нулевое положение при выключенном питании с помощью так называемых безмоментных пружин. Создаваемый ими вращающий момент значительно меньше моментов, создаваемых катушками логометра, и не оказывает заметного влияния на показания прибора. Электрические термометры с термоэлектрическими датчиками устанавливают на тепловозах для контроля температуры газов в цилиндрах дизеля. В комплект термометра входит термоэлектрический датчик (термопара) и милливольтметр, служащий указате-
Рис. 347. Принципиальная схема электрического термометра с термоэлектрическим датчиком лем. Термоэлектрический датчик выполнен из двух сваренных вместе проволок или пластин из разнородны металлов или сплавов. Когда два таких проводника А и В (рис. 347) соединяются в какой-либо точке и включаются в замкнутую электрическую цепь, при изменении температуры места их соединения в цепи возникает электродвижущая сила, называемая термо-э. д. с. Спай 1 двух разнородных металлов термопары называют горячим спаем, концы 2 и 3 — свободными или холодными спаями. Значение термо э. д. с. зависит только от разности температур t1 нагретого 1 и t2 холодных 2 и 3 концов проводников А и В и от природы материалов, применяемых в качестве электродов. Если температуру свободных концов поддерживать постоянной и одинаковой, то термо э. д. с. будет пропорциональна температуре горячего спая. Термопары развивают сравнительно небольшую термо-э.д.с, поэтому милливольтметры, используемые для ее измерения, должны иметь точную температурную компенсацию. Шкала такого прибора градуируется в °С. На тепловозах применяют термоэлектрические датчики, составленные из следующих сплавов: хромель (89% Ni+10% Cr + 1% Fe) —копель (56% Cu + 44% Ni); хромель — алюмель (95% Ni + 2% Al + 2% Mn+1 % Si). Термопара из этих сплавов создает термо-э.д.с. 4—7 мВ. Если электроизмерительный прибор подключить к термопаре медными проводами, то возникнет большая погрешность измерения, так как при электрическом контакте свободных концов 2 а 3 термопары с соединительными проводами из-за разности температур t2 и t0 (в месте установки прибора) появятся добавочные термо-э. д. с. Для устранения этой погрешности соединительные провода С и D (их называют компенсационными) изготовляют из материалов, обладающих теми же термоэлектрическими характеристиками, что и электроды термопары. Следовательно, возникающие в месте контактов 2 и 3 термо-э. д. с. будут иметь такие же значения, как и в основной термопаре. Компенсационные провода изготовляют из тех же материалов, что и электроды термопары, но они имеют меньшую площадь сечения. В этом случае температура концов 2 и 3 может быть различной. Электрические уровнемеры. Для измерения объема или уровня жидкости в баках и резервуарах применяют различного рода электрические уровнемеры. В качестве примера рассмотрим схему электрического уровнемера с реостатным датчиком (рис. 348,а). В баке с измеряемой жидкостью помещен поплавок 1, положение которого определяется объемом или уровнем жидкости. Изменение положения поплавка вызывает изменение сопротивлений R1 и R2 реостатного датчика 3, включенных в два плеча моста постоян-
Рис. 348. Принципиальные схемы электрических уровнемера (а) и манометра (б) с реостатными датчиками ного тока, два других плеча которого образованы резисторами сопротивлениями R3 и R4. Изменение сопротивлений R1 и R2 изменяет ток в измерительной диагонали моста, в которую включены катушки логометра 2, служащего указателем. Шкала логометра градуируется в единицах объема, занимаемого жидкостью, или единицах уровня жидкости. Электрические манометры. Для измерения давления масла в системе смазки дизеля на тепловозах устанавливают электрические манометры. Такой манометр имеет реостатный датчик 5 (рис. 348,б), движок которого связан с гофрированной мембраной 4. Указателем служит логометр, шкала которого градуирована непосредственно в единицах давления. Логометр включен в диагональ электрического моста постоянного тока, плечи которого образованы сопротивлениями R1 и R2 реостатного датчика и резисторами сопротивлениями R3 и R4. Резисторы сопротивлениями R5 и R6 предназначены для получения требуемой градуировки шкалы прибора и температурной компенсации, а резистор сопротивлением R7 — для выравнивания сопротивлений катушек логометра (одна из них имеет большие размеры, чем другая). При изменении давления в корпусе датчика мембрана прогибается и перемещает движок реостата. При этом изменяются сопротивления R1 и R2 датчика и ток в измерительной диагонали моста. Следовательно, стрелка указателя изменяет свое положение. Электрические тахометры. Частоту вращения валов различных машин (электродвигателей, дизелей и пр.) измеряют приборами, называемыми тахометрами. Наибольшее распространение получили электрические тахометры с асинхронным тахогенератором, принцип действия которого рассмотрен в § 84. На тепловозах применяют магнитно-индукционные тахометры (рис. 349), измеряющие частоту вращения вала дизеля. Вал тахометра связывают непосредственно или посредством гибкого вала с валом дизеля. При вращении вала тахометра приводится во вращение магнитный узел, состоящий из двух дисков, на которых укреплены постоянные магниты 2. При вращении дисков создается вращающееся магнитное поле, которое индуцирует вихревые токи в расположенном между магнитами токопроводящем диске 1. В результате взаимодействия вращающегося магнитного поля с вихревыми токами возникает вращающий момент М (как и в индукционных приборах), стремящийся повернуть диск в направлении вращения электромагнитов. Этот момент пропорционален частоте пересечения магнитным полем токопроводящего диска, т. е. частоте вращения п вала дизеля: М = c1n. Валик, на котором укреплен токопроводящий диск 1, связан со стрелкой прибора и спиральной пружиной 3, создающей противодействующий момент Мпр = с2φ. При равновесии этих моментов М = Мпр, т. е. φ= (c1/c2) n = сn (114) Следовательно, угол отклонения стрелки φ пропорционален частоте вращения п, т. е. прибор имеет равномерную шкалу. 37. Принцип действия и основные характеристики трансформатора Роль и значение трансформаторов Трансформатором называется статическое электромагнитное устройство, предназначенное для преобразования посредством электромагнитной индукции электрической энергии переменного тока одного напряжения в электрическую энергию другого напряжения, а также для преобразования числа фаз и частоты. Это устройство чаще всего состоит из двух (а иногда и большего числа) взаимно неподвижных и электрически не связанных между собой обмоток, располагаемых на ферромагнитном магнитопроводе (рис. 1). Обмотки имеют между собой магнитную связь, осуществляемую переменным магнитным полем. Ферромагнитный магнитопровод предназначен для усиления магнитной связи между обмотками.
Иногда в трансформаторах ферромагнитный магнитопровод может отсутствовать. Такие трансформаторы называются воздушными. Они применяются в специальных случаях при преобразовании переменных токов высокой частоты. Обмотка трансформатора, принимающая энергию из сети, называется первичной (обмотка 1 на рис. 1), а обмотка, отдающая энергию в сеть, - вторичной (обмотка 2 на рис. 1). Обмотки трансформатора рассчитываются для подключения к сетям с разными напряжениями. Обмотка, предназначенная для присоединения к сети с более высоким напряжением, называется обмоткой высшего напряжения (ВН), а подсоединяемая к сети с меньшим напряжением - обмоткой низшего напряжения (НН). Если вторичное напряжение меньше первичного, то трансформатор называется понижающим, а если больше - повышающим. В зависимости от включения тех или иных обмоток к сети каждый трансформатор может быть как повышающим, так и понижающим. Трансформаторы с двумя обмотками называются двухобмоточными. Изготовляются также трансформаторы, у которых имеется три или более электрически не связанных обмоток. Такие трансформаторы называются трех- или многообмоточными. Многообмоточные трансформаторы имеют несколько вторичных или первичных обмоток. В зависимости от числа фаз трансформаторы подразделяются на однофазные, трехфазные и многофазные. Трансформаторы находят самое широкое применение. Существует очень много их типов, различающихся как по назначению, так и по выполнению. Здесь в первую очередь следует выделить группу силовых трансформаторов, используемых при передаче и распределении электроэнергии, производимой на электростанциях. Установленные на электрических станциях генераторы производят электрическую энергию относительно невысокого напряжения (до 15,75-24 кВ). При передаче ее к потребителям, расположенным на расстоянии в несколько сотен или даже тысяч километров, для уменьшения сечений проводов линии и потерь энергии в них целесообразно эту энергию преобразовать, уменьшив ток в линии путем соответствующего повышения напряжения. Напряжение линии электропередачи принимают тем выше, чем больше длина линии и передаваемая мощность. В современных электрических сетях энергия передается при напряжениях до 750 - 1150 кВ. Повышение напряжения на электростанциях осуществляется с помощью повышающих трансформаторов. В конце линии электропередачи устанавливаются трансформаторы, которые понижают напряжение, так как для распределения энергии по заводам, фабрикам, жилым домам и т. п. необходимы сравнительно низкие напряжения. При передаче электрической энергии от места ее производства до места потребления требуется многократная ее трансформация. Поэтому мощность всех трансформаторов, установленных в электрической сети, в 7 - 8 раз превышает общую мощность генераторов. Единичная мощность силовых трансформаторов колеблется от нескольких киловольт-ампер до сотен тысяч киловольт-ампер. В дальнейшем изложении главное внимание будет уделяться силовым трансформаторам. Наряду с силовыми трансформаторами широкое распространение получили специальные трансформаторы (сварочные, для питания электродуговых печей, измерительные и др.). Трансформаторы небольших мощностей находят широкое применение в устройствах связи, радио, телевидения, системах автоматики и др. По способу охлаждения в зависимости от охлаждающей среды трансформаторы подразделяются на сухие (с воздушным охлаждением), масляные и с заполнением негорючим жидким диэлектриком.
Двигатель постоянного тока - электродвигатель, питание которого осуществляется постоянным током. Двигатель состоит из якорной обмотки (ротора с якорной обмоткой), статора, щёточного узла. ДПТ являются обратимыми электрическими машинами, то есть в определенных условиях способны работать как генераторы. Статор На статоре ДПТ располагаются в зависимости от конструкции:
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики эл.двигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения. Ротор Ротор любого ДПТ состоит из многих катушек, на одну из которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть создания максимального момента на роторе). Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов, расположенных по оси ротора. Существуют и другие конструкции коллекторного узла. Щёточный (коллекторно-щёточный) узел Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором взаимного положения полюсов ротора относительно статора(снижая ток коммутации), а также подключением нешних реактивных элементов (конденсаторов). При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или "круговой огонь". Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем. Принцип работы Магнитное поле, создаваемое статором перпендикулярно магнитному полю ротора. Суммарное магнитное поле статора и ротора и создает вращающий момент ротора. Достоинства и недостатки ДПТ Достоинства:
Недостатки:
39. Принцип действия и основные характеристики асинхронного двигателя. Асинхронный электродвигатель - электрическая асинхронная машина для преобразования электрической энергии в механическую. Принцип работы А. э. основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трёхфазного переменного тока по обмоткам обмоткам статора, с током, индуктированным полем статора в обмотках ротора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля при условии, что частота вращения ротора n меньше частоты вращения поля n1 .Т. о., ротор совершает асинхронное вращение по отношению к полю. Принцип работы асинхронного двигателя Сначала предположим, что ротор двигателя находится в состоянии покоя. После подключения обмотки статора трехфазного асинхронного электродвигателя к сети возникает вращающееся поле. Постоянный, но вращающийся поток Ф, показанный на рис.1, пронизывает стальной сердечник статора, воздушный зазор и стальной сердечник ротора двухполюсного асинхронного электродвигателя, причем вращается с синхронной частотой n. Как и в трансформаторе, две обмотки асинхронного двигателя связываются между собой магнитным потоком Ф. Из-за сращения постоянного потока здесь достигается такой же эффект, как при переменном потоке в трансформаторе. Электродвигатели асинхронные, в отличие от трансформатора, имеет маленький воздушный зазор (между статором и ротором) и поэтому ток холостого хода больше, но он ничего не изменяет в принципе работы асинхронной электрической машины. Вращающееся поле наводит в обмотке ротора асинхронного электродвигателя ЭДС с частотой f2, которая равна в состоянии покоя частоте тока в сети, т.е. f2=f. Эти ЭДС могут быть измерены в двигателе с контактными кольцами при неподвижном роторе. ЭДС вызывают в короткозамкнутой обмотке ротора токи, которые, взаимодействуя с магнитным полем, являются причиной возникновения электрических сил и обусловливают появление момента вращения ротора. Этот момент вращения имеет то же самое направление, что и вращающееся поле, захватывает ротор асинхронного электродвигателя в этом направлении вращения и создает его ускорение. При вращении ротора — в момент разбега с возрастающей частотой вращения — относительная скорость по сравнению со скоростью вращающегося поля постепенно снижается. Однако ротор электродвигателя не может достичь синхронной частоты вращения поля, так как в этом случае в обмотке ротора на наводились бы ЭДС, не было бы тока и не создавался бы момент вращения. В режиме холостого хода асинхронный электродвигатель имеет частоту вращения ротора n, лишь незначительно отклоняющуюся от синхронной частоты вращения nc из-за трения. Разница между относительными частотами вращения nc — n называется скольжением двигателя s, т.е.s=1-(n/nc) или в процентах s=100*(1-(n/nc))% Таким образом, частота вращения при известном скольжении определяется выражением n=nc(1-s) В состоянии покоя при n = 0 согласно скольжение s = 1; при синхронном вращении s = 0 Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности). В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации. Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
40. Принцип действия и основные характеристики синхронного двигателя. В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы). В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещены катушки возбуждения 2. На рисунке б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2.
Синхронный двигатель, на роторе которого отсутствует обмотка возбуждения, называется синхронным реактивным двигателем. Ротор синхронного реактивного двигателя изготавливается из ферромагнитного материала и должен иметь явновыраженные полюсы. Вращающееся магнитное поле статора намагничивает ротор. Явнополюсный ротор имеет неодинаковые магнитные сопротивления по продольной и поперечной осям полюса. Силовые линии магнитного поля статора изгибаются, стремясь пройти по пути с меньшим магнитным сопротивлением. Деформация магнитного поля вызовет, вследствие упругих свойств силовых линий, реактивный момент, вращающий ротор синхронно с полем статора. Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора. С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма. У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов. В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
|

 (7)
(7) (8)
(8)


 Угол
сдвига фаз между напряжением и током
определяется из треугольника через
cos
ф = Ua/U или tg ф = Ul/Ua .
Угол
сдвига фаз между напряжением и током
определяется из треугольника через
cos
ф = Ua/U или tg ф = Ul/Ua .
 Треугольник
мощностей получается из соотношения
Р2 + Q2 = S2.
Треугольник
мощностей получается из соотношения
Р2 + Q2 = S2.
 (11)
(11)
 -
фаза комплекса проводимости.
-
фаза комплекса проводимости.

 .
. ,
где
,
где  [См]
– реактивная проводимость катушки
индуктивности.
[См]
– реактивная проводимость катушки
индуктивности. .
.





 Для
цепи на рис.1 имеет место
Для
цепи на рис.1 имеет место
 .
. 

 .
.

 Рис.
5.4
Рис.
5.4 Рис.
5.5
Рис.
5.5 Рис.
5.6
Рис.
5.6 Рис.
5.7
Рис.
5.7
 Рис.
5.10
Рис.
5.10 Рис.
5.11
Рис.
5.11 .
. Рис.
5.12
Рис.
5.12 .
. .
. .
.



 Рис.
321. Устройство магнитоэлектрического
измерительного механизма
Рис.
321. Устройство магнитоэлектрического
измерительного механизма Рис.
322. Воздушный (а) и магнитно-индукционный
(б) демпферы
Рис.
322. Воздушный (а) и магнитно-индукционный
(б) демпферы Рис.
323. Устройство подвижной части
электроизмерительного прибора
Рис.
323. Устройство подвижной части
электроизмерительного прибора Рис.
324. Устройство электромагнитных
измерительных механизмов с плоской
(а) и круглой (б) катушками
Рис.
324. Устройство электромагнитных
измерительных механизмов с плоской
(а) и круглой (б) катушками Рис.
325. Устройство астатического
измерительного механизма
Рис.
325. Устройство астатического
измерительного механизма Рис.
326. Устройство (а) и принципиальная
схема (б) электродинамического
измерительного механизма
Рис.
326. Устройство (а) и принципиальная
схема (б) электродинамического
измерительного механизма Рис.
327. Схемы включения электродинамического
прибора в качестве амперметра (а),
вольтметра (б) и ваттметра (в)
Рис.
327. Схемы включения электродинамического
прибора в качестве амперметра (а),
вольтметра (б) и ваттметра (в) Рис.
328. Принципиальная схема ферродинамического
измерительного механизма
Рис.
328. Принципиальная схема ферродинамического
измерительного механизма Рис.
329. Устройство индукционного
измерительного механизма
Рис.
329. Устройство индукционного
измерительного механизма




|