

Лабораторная работа № 12 синтез регулятора
Цель работы: изучение метода синтеза регулятора по заданному запасу устойчивости объекта управления и ограничениям на колебательность выхода системы.
Порядок выполнения работы
Для заданного объекта управления выбрать структуру регулятора (ПИ или ПИД) и пользуясь изложенной методикой получить параметры настройки регулятора.
Построить динамические характеристики системы. Решения найти при нулевых начальных условиях:
аналитическим способом;
одним из численных методов, реализованным в виде процедуры Mathcad.
Теоретические сведения
Пусть передаточная функция разомкнутой цепи (см. рис. 27, 28):
![]() ,
(69)
,
(69)
тогда передаточная функция замкнутой системы имеет вид:
![]() ,
(70)
,
(70)
где N(s) – числитель передаточной функции разомкнутой системы;
L(s) – знаменатель передаточной функции разомкнутой системы;
k – коэффициент усиления;
y(t) – выход системы;
g(t) – задание для системы регулирования.
y(s) и g(s) характеризуют соответственно состояние динамического процесса и задание в изображениях по Лапласу. Эти переменные связаны соотношением:
![]() ,
,
в котором е(s) – величина рассогласования между заданием g(s) и текущим значением регулируемой переменной y(s).
В (69) предполагается, что степень числителя меньше степени знаменателя. Из (70) следует:
![]() . (71)
. (71)
Если
в (71) формально заменить s
на оператор дифференцирования
![]() ,
то выражение
,
то выражение
![]()
![]() (72)
(72)
является дифференциальным уравнением в операторной форме для замкнутой системы.
В задачах автоматического регулирования переменная y(t) часто представляет собою отклонение текущего состояния от его номинального (заданного) значения. Поэтому целью регулирования в этом случае является выполнение «нулевого» задания, в результате которого переменная состояния y(t) совпадает с его номинальным значением g(t). Следовательно, в такой постановке g(t) можно принять равным нулю, и в результате дифференциальное уравнение (72) приобретает вид
![]() .
.
Уравнение
![]() является характеристическим
уравнением замкнутой системы.
является характеристическим
уравнением замкнутой системы.
При проектировании регулятора необходимо решать задачу распределения на комплексной плоскости корней = j характеристического полинома (полюсов передаточной функции). Требуется решить вопрос, как расположить корни, чтобы переходной процесс был в некотором смысле оптимальным, а система обладала желаемыми показателями качества.
Для этого можно поступить следующим образом: в характеристическом полиноме необходимо выделить полюсы, предназначенные для компенсации нулей, а оставшийся полином формировать из условия желаемого расположения корней, учитывая следующее.
Обычно
переходной процесс характеризуется
степенью устойчивости
и колебательностью
![]() .
Эти два показателя должны обеспечиваться
расположением полюсов независимо от
порядка замкнутой системы.
.
Эти два показателя должны обеспечиваться
расположением полюсов независимо от
порядка замкнутой системы.
Задание
определенной колебательности заставляет
ограничивать область расположения
корней двумя лучами (АО и DО
на рис. 63), которые составляют с вещественной
осью угол
![]() .
Задание степени устойчивости
заставляет ограничивать область
расположения корней вертикальной прямой
ВС, проходящей параллельно мнимой оси
на расстоянии
внутри сектора с углом
.
Задание степени устойчивости
заставляет ограничивать область
расположения корней вертикальной прямой
ВС, проходящей параллельно мнимой оси
на расстоянии
внутри сектора с углом
![]() ,
как изображено на рис. 63.
,
как изображено на рис. 63.
Для решения задачи расположения корней на комплексной плоскости ломаную линию АВСD можно аппроксимировать левой ветвью гиперболы. При этом сектор формируется двумя асимптотами:
![]() ,
,
а угловой коэффициент асимптот
![]() .
.
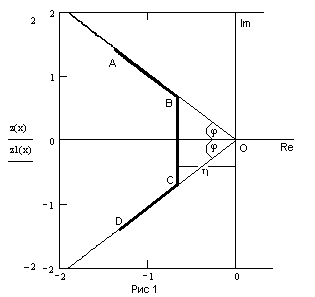
Рис. 63. Область расположения корней замкнутой системы
Гипербола описывается уравнением:
![]() .
.
Полагая a = , выделим произвольную точку M(x, y) на гиперболе (рис. 64). Расстояние OМ от точки M(x, y) до начала координат обозначим R. Координаты точки M(x, y):
![]() ,
,
![]() ,
,
где R – радиус-вектор точки M(x, y), а – угол радиус-вектора. Подставляя x и y в уравнение гиперболы, получаем:
![]() , (73)
, (73)
где
b = atg() = a.
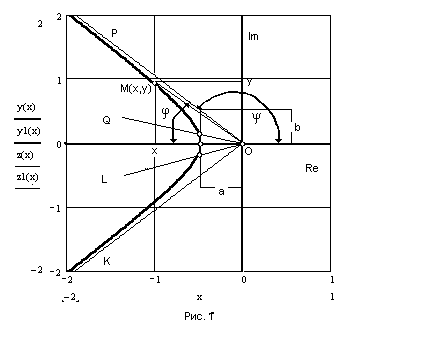
Рис. 64. Расположение корней на комплексной плоскости
Из (73) определяем величину радиус-вектора:
![]() .
.
С учетом того, что a = ,
![]() .
.
Свяжем положение точки M(x, y) с порядком характеристического полинома замкнутой системы.
Разделим сектор
POK на n равных
секторов, соответствующих порядку
характеристического уравнения замкнутой
системы. Элементарный сектор будет
иметь величину
![]() .
Положение точки M(x,
y) на пересечении луча i
– сектора с гиперболой определяется
полярными координатами:
.
Положение точки M(x,
y) на пересечении луча i
– сектора с гиперболой определяется
полярными координатами:
![]() .
(74)
.
(74)
![]() ,
i = 1, 2, …n. (75)
,
i = 1, 2, …n. (75)
Отсюда следует, что, задавая величину колебательности , степень устойчивости и порядок замкнутой системы, определяем координаты точек Mi(xi, yi) из соотношений
![]() ,
,
![]() .
.
Координаты xi и yi соответствуют действительным и мнимым частям корней характеристического уравнения:
xi = Re i yi = Im i.
Корни замкнутой системы регулирования будут иметь вид
i = Re xi Im yi ,
а в случае действительных корней
i = Re xi .
Характеристическое уравнение будет иметь вид произведения состоящего из этих сомножителей:
![]() (76)
(76)