

ГОСУДАРСТВЕННОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«БЕЛОРУССКО-РОССИЙСКИЙ УНИВЕРСИТЕТ»
Кафедра «Основы проектирования машин»
Теория механизмов, машин и манипуляторов Методические указания к практическим занятиям для студентов технических специальностей

Могилев 2006
УДК 621.01
ББК 34.4
Т 69
Рекомендовано к опубликованию
учебно-методическим отделом управлением
ГУ ВПО «Белорусско-Российский университет»
Одобрено кафедрой «Основы проектирования машин» 30 августа 2006 г., протокол № 10
Составитель д-р техн. наук, доц. Л. А. Борисенко
Рецензент д-р техн. наук, проф. Р. М. Игнатищев
Изложен порядок и содержание практических занятий по курсу «Теория механизмов, машин и манипуляторов».
Учебное издание
ТЕОРИЯ МЕХАНИЗМОВ, МАШИН И МАНИПУЛЯТОРОВ
Ответственный за выпуск А. М. Даньков
Технический редактор А. А. Подошевко
Компьютерная верстка В. Э. Ковалевский
Подписано в печать . Формат 60х84/16. Бумага офсетная. Гарнитура Таймс.
Печать трафаретная. Усл. печ. л. Уч. изд. л. Тираж 65 экз. Заказ №
Издатель и полиграфическое исполнение
Государственное учреждение высшего профессионального образования
«Белорусско-Российский университет»
ЛИ N 02330/375 от 29.06.2004 г.
212005, Г. Могилев, пр. Мира, 43
ГУ ВПО «Белорусско-Российский
университет», 2006
1 Кинематические пары. Степень подвижности кинематической цепи и механизма
Цель занятия – закрепление понятий: кинематическая пара, кинематическая цепь, степень подвижности механизма.
При решении задач следует руководствоваться основными сведениями, представленными в списке литературы.
Методику решения задач рассмотрим на примере кинематической пары «сферический шарнир с пальцем» (рисунок 1).
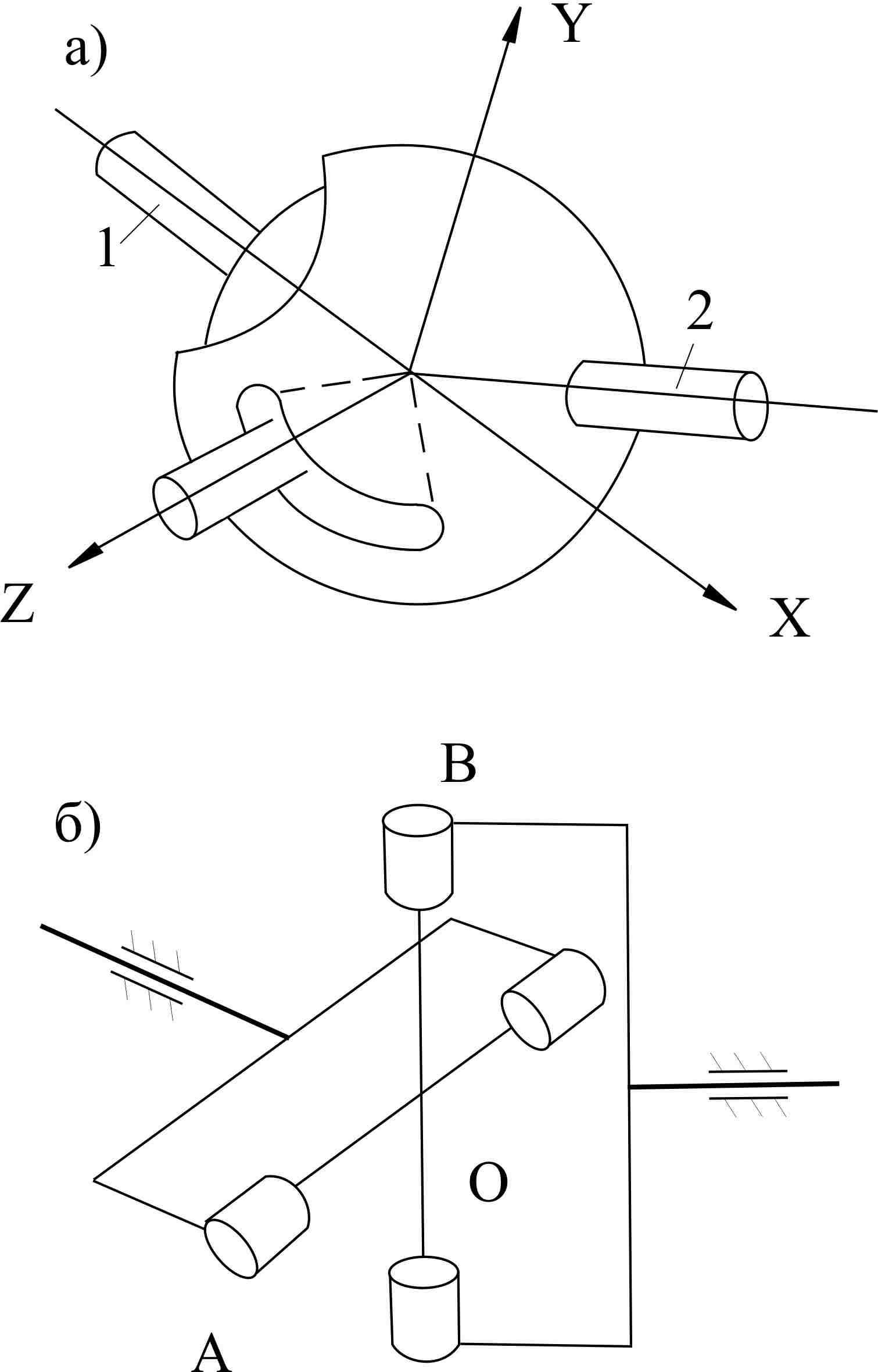
Рисунок 1 Кинематическая пара «сферический шарнир с пальцем»
Условимся считать звено 1 неподвижным и введем координатную систему xyz, связанную с этим звеном. Выбор осей производится из условия упрощения решения задачи. Считаем, что палец принадлежит звену 1. В данном случае ось x направлена вдоль оси стержня звена 1, ось z вдоль оси пальца, ось y перпендикулярно к ним. Система координат xyz правая.
Рассмотрим как движется звено 2 относительно звена 1. Разрешенные движения удобно отмечать стрелками, запрещенные движения – перечеркнутыми стрелками. Из анализа данного соединения ясно, что все поступательные движения звена 2 вдоль осей x, y, z запрещены; разрешены только вращательные движения вокруг осей y, z и степень подвижности этой пары W=2.
Аналогом данной кинематической пары служит кинематическое соединение, представленное на рисунке 1,б. Это соединение получило техническое название «шарнир Гука». Из сопоставления рисунка 1,а и рисунка 1,б следует, что у них разрешены вращения вокруг одних и тех же осей.
На рисунке 2 представлены кинематические пары, для которых следует, руководствуясь изложенной выше методикой, установить разрешенные движения и степень подвижности .

Рисунок 2 Виды кинематических пар
Определение степени подвижности кинематической цепи рассмотрим на примере схемы механизма двигателя внутреннего сгорания (рисунок 3).
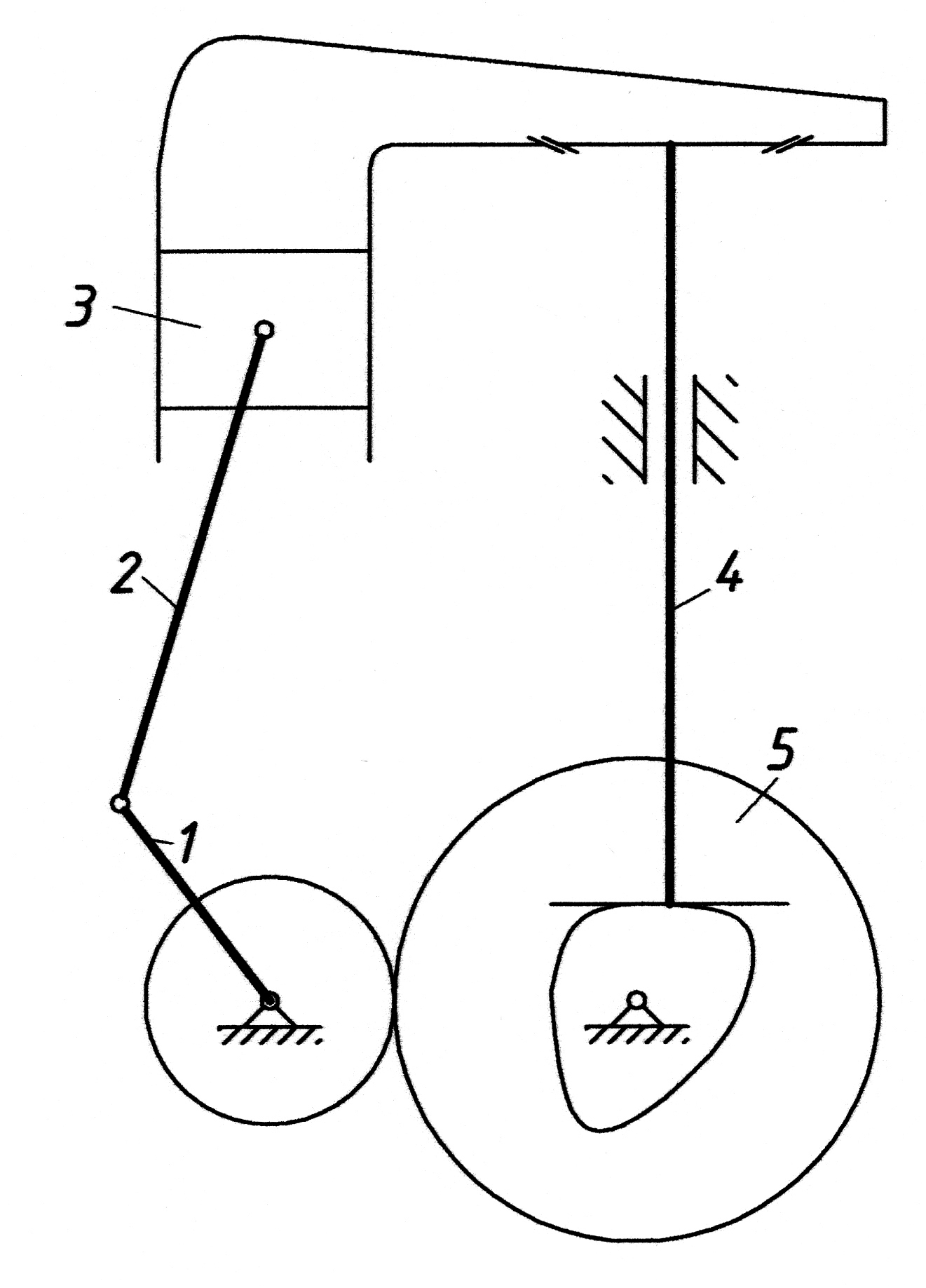
Рисунок 3 Схема двигателя внутреннего сгорания
Проставим обозначения кинематических пар и звеньев на схеме механизма. В данном механизме семь кинематических пар и девять звеньев: пять вращательных, две поступательных, одна зубчатая и одна кулачковая пары.
Степень подвижности механизма определяется по формуле Чебышева [1]:
W = 3n – 2p1 – p2,
где n – число подвижных звеньев;
р1 – число одноподвижных кинематических пар;
р2 – число двухподвижных кинематических пар.
В данном случае n = 9, p1 = 5, p2= 2 степень подвижности W=1.
На рисунках 4-5 представлены схемы плоских механизмов, используемых в различных областях техники, для которых нужно определить степень подвижности, используя формулу Чебышева. Для определения степени подвижности пространственных механизмов следует использовать формулу Сомова – Малышева [1].
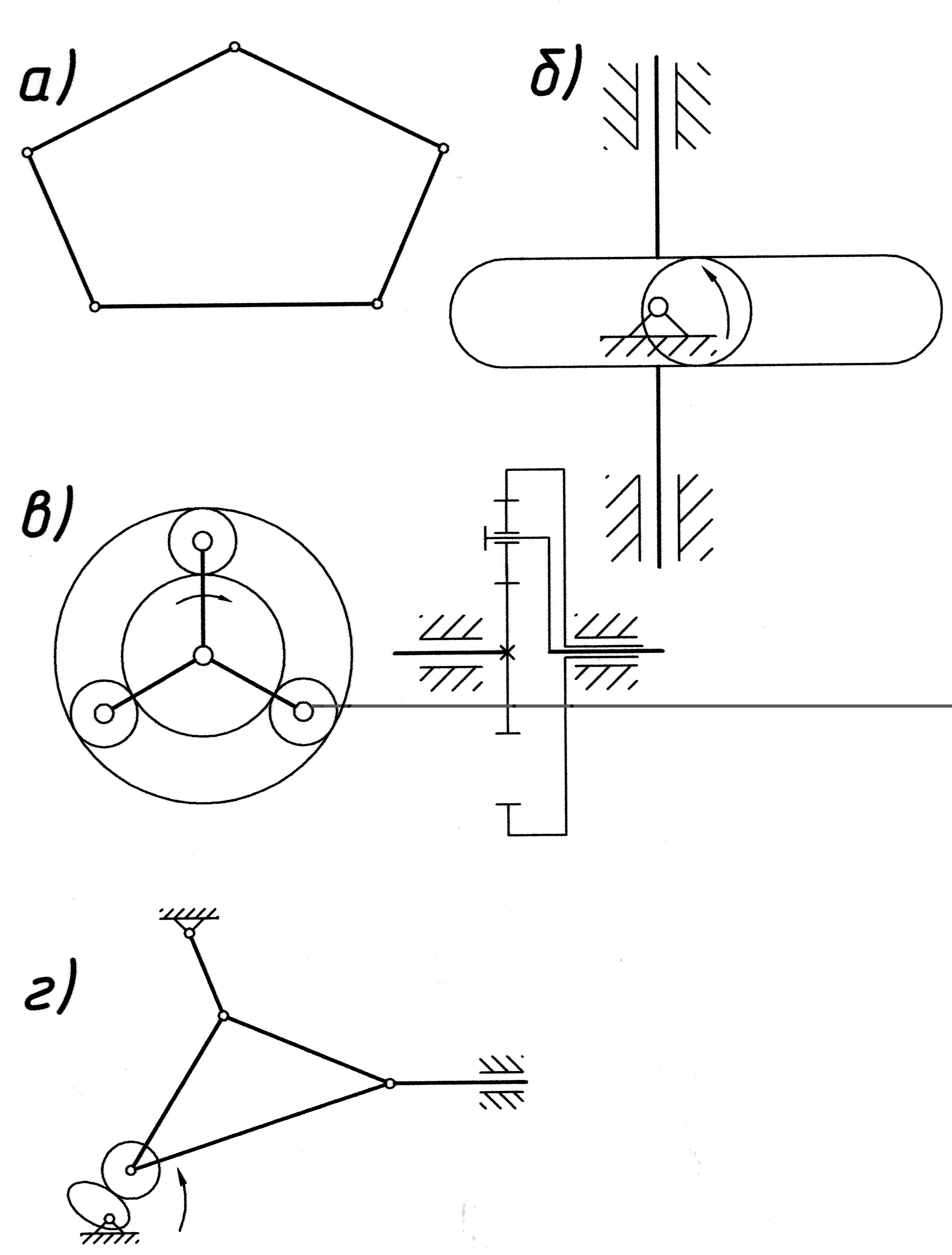
Рисунок 4 Схемы плоских механизмов
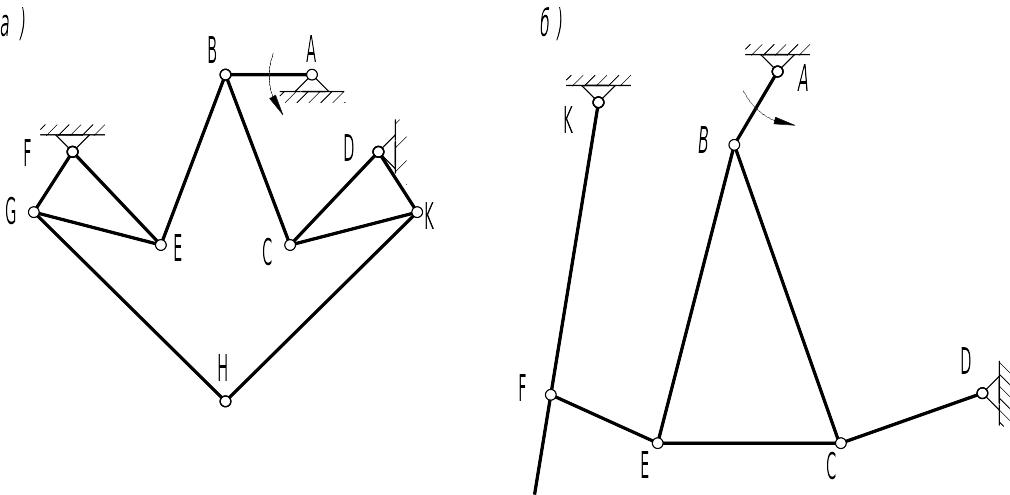
Рисунок 5 Схемы плоских рычажных механизмов
Контрольные вопросы
1 Что такое звено механизма?
2 Что такое кинематическая пара?
3 Какие пары относятся к низшим, а какие к высшим? В чем их различие?
4 Как определяется степень подвижности кинематической пары?
5 Перечислите известные вам кинематические пары и охарактеризуйте их.
6 Что такое кинематическое соединение?