

6.2.3. Контрольно-корректирующая станция дифференциальной подсистемы глонасс/gps [18]
Описание морской дифференциальной подсистемы ГЛОНАСС/GPS. Морская дифференциальная подсистема (далее по тексту – диффсистема) ГЛОНАСС/GPS предназначена для высокоточного определения координат места всех потребителей, находящихся в рабочей зоне ее действия. Диффсистема ГЛОНАСС/GPS базируется на основе использования космических навигационных систем (КНС) ГЛОНАСС (Россия) и GPS (США).
Космическая группировка GPS состоит из 24 НКА в 6 орбитальных плоскостях по 4 НКА в каждой. Орбитальные плоскости расположены под углом 55 к экватору. Каждый НКА передает сигналы на одной частоте 1575,42 МГц, с модуляцией индивидуальным псевдослучайным кодом. Широкополосный сигнал формируется на НКА путем фазовой манипуляции несущей частоты сигналом псевдослучайной последовательности из 1023 компонентов тактовой частотой 1 МГц. Информационные данные передаются со скоростью 50 бит/сек, в них содержится информация о техническом состоянии, орбитальных координатах (эфемеридах), временном сдвиге опорного генератора (ОГ) и множество других данных. Эфемериды НКА привязаны к Всемирной геодезической системе 1984 г. (WGS-84).
Российская Глобальная навигационная спутниковая система (ГЛОНАСС) подобна системе GPS. Система состоит из 24 НКА в трех орбитальных плоскостях на высоте 19100 км, что соответствует периоду обращения 11 часов 15 минут. Наклонение орбиты 64,8. Каждый НКА непрерывно передает данные о его собственном местоположении в прямоугольной системе координат (эферемиды), а также альманах данных о грубом местоположении всех НКА СНС. Координаты НКА задаются в системе опорного эллипсоида “Земля-90”. Каждый НКА работает на разных частотах от 1602,5625 МГц до 1615,5 МГц с шагом 0,5625 МГц, однако модулируется сигнал одинаковой псевдослучайной последовательностью с тактовой частотой 0,511 МГц с периодом 1 мс. Для уменьшения частотного диапазона, используемого ГЛОНАСС, с 1998 г. по 2005 г. все каналы с номерами выше 13 не используются, а с 2005 г. частотный диапазон будет сдвинут вниз на –7, +6 каналы с введением диаметрально противоположной конфигурации, в которой два спутника в одной и той же плоскости, разделенные 180 градусами, будут передавать свои сигналы на одной и той же частоте.
Время ГЛОНАСС основано на UTC (SU), а время GPS – на UTC (USNO). В интегральном составе эти системы называют Глобальными Навигационными Спутниковыми Системами (GNSS). Для повышения точности определения местоположения кораблей и судов при подходах к побережью или в других стесненных условиях используется дифференциальный метод, суть которого заключается в передаче на судовые приемники ГЛОНАСС/ GPS поправок к измеренным дальностям до НКА, полученным опорной станцией от группы спутников, размещенных в эталонных координатах (см. рис.5.5). В этом случае эта группа образует целостность, предполагающую, в частности, способность системы обеспечить своевременные предупреждения пользователям, когда ее нельзя использовать для навигации.
Таким образом, в составе морской дифференциальной подсистемы ГЛОНАСС/GPS используются: СНС ГЛОНАСС; СНС GPS; оборудование ККС (опорная станция, станция интегрального контроля, передатчик диффпоправок и т.д.); неограниченное количество судовых приемников ГЛОНАСС/GPS, ГЛОНАСС, GPS, включая приемники диффпоправок.

Рис.5.5. Схема пространственного разнесения пар спутниковых навигационных подсистем GPS и ГЛОНАСС для реализации систем дифференциальных поправок DGPS и ДГЛОНАСС повышенной (субметровой) точности.
Дифференциальный метод основан на идентичности условий, влияющих на точность определения местоположения приемника ГЛОНАСС/GPS опорной станции и судовых приемников. Основными источниками таких погрешностей являются:
1) Ошибки селективного доступа (только для GPS) – искусственные ошибки, вводимые в сигналы НКА с целью загрубления точности определения местоположения до 100 м. С 1.05.2000 г. селективный доступ отменен Президентом США для большинства районов Земного шара. В ГЛОНАСС селективный доступ отсутствует.
2) Ионосферная рефракция распространения сигнала, в среднем составляет 20–30 м в течение дня и 3–6 м – ночью.
3) Тропосферная рефракция распространения сигнала в нижних слоях атмосферы. Для НКА с малыми высотами она достигает до 30 м. Разница в значении рефракции между приемником опорной станции и судовым приемником может составлять 1–3 м для низких НКА.
4) Эфемеридная ошибка – разница между фактическим местоположением НКА и его местоположением, вычисленным по данным эфемерид, полученным с НКА. Обычно эта разница не превышает 3 м.
5) Ошибки бортовой шкалы времени НКА – разница между временными шкалами каждого используемого НКА и временем центрального синхронизатора, по которому производился расчет прогнозируемых эфемерид.
При работе приемника опорной станции и судового приемника по одним и тем же НКА все вышеперечисленные ошибки компенсируются дифференциальным режимом. Кроме этого, дифференциальный режим обеспечивает функцию контроля целостности СНС ГЛОНАСС и GPS путем определения приемниками ГЛОНАСС/GPS неработоспособных НКА и передачи этой информации на судовые приемники с минимальной временной задержкой.
Ниже приводится детальное описание аппаратуры контрольно-корректирующей станции (ККС), включающей в себя опорную станцию (ОС), станцию интегрального контроля (СИК) и станцию удалённого контроля (СУК). Аппаратура ОС и СИК унифицированна для ККС Азовского (обслуживаемого радиоцентром Темрюка) и Чёрного (обслуживаемого радиоцентром Дооба) морей, централизованно управляемых из РЦУС Новороссийска, аппаратура которого также унифицированна с первыми. Естественно, что оборудование ОС и СИК на этих радиоцентрах так жемаксимально унифицировано в пределах каждой ККС. Мы приводим здесь подробное (почти дубликативное) описание оборудования ОС и СИК для иллюстрации уровня достигнутой унификации.
Описание контрольно-корректирующей станции на Дообе. Контрольно-корректирующая станция предназначена для определения и передачи потребителям диффпоправок для НКА СНС ГЛОНАСС/GPS. Она имеет следующие технические характеристики и рабочие условия. ККС обеспечивает определение координат места судна с точностью 1–5 м в зоне действия диффсистемы. Потребителю передаётся также оперативная информация о нарушениях функционирования диффсистемы и НКА ГЛОНАСС и GPS.
Для обеспечения надёжности и эксплуатационной готовности диффсистемы предусмотрено горячее резервирование основного оборудования. При возникновении сбоев или отказа основного комплекта производится автоматическое переключение на резервный комплект.
Электропитание оборудования осуществляется от сети однофазного переменного тока напряжением 220 В +10–15% и частотой 50 Гц 5% через источник бесперебойного питания. Потребляемая мощность не более 520 Вт. Дополнительно предусмотрено подключение ОС и СИК к резервному источнику питания постоянного тока с напряжением от 21 до 33 В. При пропадании напряжения в основной сети ОС и СИК автоматически переключаются на питание от резервной сети.
Опорная станция (ОС) Дооба[20]:
- количество каналов приемника ГЛОНАСС/GPS – 28;
- тип принимаемого сигнала ГЛОНАСС: ПТ, F1, GPS: С/А, LI;
- точность измерения псевдодальности (СКП) – не хуже 0,3 м;
- точность измерения скорости изменения псевдодальности (СКП) – не хуже 4 см/с;
- точность коррекции псевдодальности (СКП) – не хуже 35 см;
- точность поправок к скорости изменения псевдодальностей (СКП) – не хуже 5 см/с;
- интервал обновления и выдачи данных – 1 с;
- время первого определения после прогрева ОГ – < 2 мин;
- типы передаваемых сообщений – 1, 31, 9, 34, 3, 32, 5, 33, 7, 35, 16, 36, 37;
- количество последовательных портов RS-232 – 4;
- исполнение MSK-модулятора – встроенный;
- диапазон частот MSK-модулятора – 283,5–325 кГц;
- точность несущей частоты MSK-модулятора – < 4х10 –6;
- уход частоты MSK-модулятора – < l0-6 в год;
- уровень выходного сигнала MSK-модулятора при нагрузке 50 Ом – 0,5 B 0,1 B;
-
питание: от сети переменного тока 220 В
(+10% –15%), 50 Гц
 5%;
от резервного источника питания
постоянного тока 27В
5%;
от резервного источника питания
постоянного тока 27В
 6В; потребляемая
мощность: < 30 Вт;
6В; потребляемая
мощность: < 30 Вт;
- диапазон рабочих температур:
- для аппаратуры внутри помещений: 0 °С – +50°С;
- для антенн, вне помещения: -40 °С – +65°С;
- длина антенного кабеля – 30 м;
- габариты – 130428,6462 мм;
- масса – 4,7 кг.
Станция интегрального контроля (СИК) Дооба [21]:
- количество каналов приемника – 28;
- тип принимаемого сигнала – ГЛОНАСС: ПТ, F1, GPS: С/А, LI;
- точность измерения псевдодальности (СКП –не хуже 0,3 м);
- точность измерения скорости изменения псевдодальности (СКП) – не хуже 4 см/с;
- время первого определения после прогрева ОГ – < 2 мин;
- исполнение приемника диффпоправок – встроенный;
- диапазон частот приемника диффпоправок – 283.5 – 325 кГц;
- типы принимаемых сообщений в соответствии со стандартом RTCM, версия 2.2;
- количество последовательных портов RS-232 – 4;
-
питание: от сети переменного тока 220 В
(+10% –15%), 50 Гц
 5%;
от резервного источника питания
постоянного тока 27В
5%;
от резервного источника питания
постоянного тока 27В
 6В;
потребляемая мощность, не более 30 Вт;
6В;
потребляемая мощность, не более 30 Вт;
- диапазон рабочих температур: для аппаратуры внутри помещений – 0 °С – +50°С; для антенн, вне помещения – -40 °С – +65 °С;
- длина антенного кабеля: к антенне ГЛОНАСС/GPS – 30 м; к антенне приёмника диффпоправок – 15 ;
- габариты: 130428,6462 мм;
- масса: 5,7 кг.
Контрольная станция, установленная в РЦУС [19]. Контрольная станция построена на IBM-совместимом компьютере с программным обеспечением контроля и управления ОС, СИК, РМк и связи с удаленной контрольной станцией. Её основные параметры:
- Системный блок в корпусе для установки в 19” стойку (высота 4 U): P233/64MB/8,4GB/CD-ROMx40/FDD/Win.NT W.S.4.0, плата С 218 Turbo 8 port с кабелем Opt/8D, плата PСL-818 HD, плата WDT-01;
- монитор в корпусе для установки в 19” стойку (высота 8 U);
- клавиатура в корпусе для установки в 19” стойку (высота 1 U);
- блок сопряжения РМк в корпусе для установки в 19” стойку (высота 1 U);
-
питание от сети переменного тока 220 В
(+10% -15%), 50 Гц
 5%;
5%;
- потребляемая мощность, не более: 400 Вт;
- диапазон рабочих температур: 0 °С – +50 °С;
Комплект поставки ККС. В состав ККС ГЛОНАСС/GPS Чёрного и Азовского морей входит следующее одинаковое оборудование:
|
Аппаратура ККС ГЛОНАСС/GPS |
Кол. |
|
1. Опорная станция ГЛОНАСС/GPS, СН 3501, ТДЦК.461513.031: |
2 |
|
антенна, ПКАН.464651.004; |
1 |
|
2. Блок приемо-вычислителя, ПКАН.467855.032; |
1 |
|
комплект кабелей, ПКАН.461951.053: - кабель антенный RG 213, 30 м., ПКАН.468543.100; - кабель имитационный RG 213, 30 м.,ПКАН.468543.100-01; - кабель связи с MSK модулятором, 0.1 м., ПКАН.685623.096; - шнур сетевой 1,2 м; - кабель связи с РМк, РК 50-2-11, 50 м., ПКАН.685623.098. |
1 |
|
Руководство по эксплуатации, ТДЦК.461513.031 РЭ |
1 |
|
паспорт, ТДЦК.461513.031 ПС |
1 |
|
станция интегрального контроля ГЛОНАСС/GPS, СН 3502, ТДЦ К.461513.032: |
2 |
|
антенна, ПКАН.464651.004; |
1 |
|
блок приемо-вычислителя, ПКАН.467855.033; |
1 |
|
антенна диф.приёмника с кабелем RG 58, 15 м., АК-1; |
1 |
|
комплект кабелей, ПКАН.461951.053-01: - кабель антенный RG 213, 30 м., ПКАН.468543.100; - кабель имитационный RG 213, 30 м., ПКАН.468543.100-01; - кабель связи с диф.приёмником, 0.1 м., ПКАН.685623.096; - кабель связи СИК – ОС, 0.5 м; шнур сетевой 1,2 м. |
1 |
|
Руководство по эксплуатации, ТДЦК.461513.032 РЭ |
1 |
|
Паспорт, ТДЦК.461513.032 ПС |
1 |
|
3. Контрольная станция ГЛОНАСС/GPS, ТДЦК.461513.033: Системный блок в корпусе для установки в 19” стойку: P233/64MB/8,4GB/CD-ROMx40/FDD/Win.NT W.S.4.0, плата С 218 Turbo 8 port с кабелем Opt/8D, плата PСL-818 HD, плата WDT-01; Монитор в корпусе для установки в 19” стойку; Клавиатура в корпусе для установки в 19” стойку; Блок сопряжения с РМк, Р205-800-000 с аксессуарами; Кабель связи блока сопряжения с РМк; Пакет ПМО контрольной станции Navior RSIM 1.0, ТДЦК.90003-01 12 01; Руководство по эксплуатации ТДЦК.461513.033 РЭ; Паспорт ТДЦК.461513.033 ПС. |
1 1
1 1 1 1 1 1 1 |
|
4. Удаленная контрольная станция ГЛОНАСС/GPS ТДЦК.461513.034: Системный блок: Р233/64MB/8,4GB/CD-ROMx40/FDD/Win.NT 4.0 с сетевой платой Монитор17”; Клавиатура; Маршрутизатор; Модем; Блок коммутации; Кабель сетевой; Пакет ПМО удаленной контрольной станции Navior RSIM 1.0, ТДЦК.90003-01 12 01; Руководство по эксплуатации ТДЦК.461513.034 РЭ; Паспорт ТДЦК.461513.034 ПС. |
1 1 1 1 2 2 2 3 1 1 1 |
Схема ККС [18,22]. Функциональная схема ККС показана на рис.5.6. Опорная станция (ОС Дооба) принимает сигналы НКА СНС ГЛОНАСС и GPS, производит выработку диффпоправок и через встроенный MSK модулятор передает сообщения в радиолинию радиомаяка. Станция интегрального контроля (СИК Дооба) принимает диффпоправки по эфиру здесь же на Дообе и проверяет их нахождение в допустимых пределах. СИК таким путём постоянно обеспечивает обратную связь с ОС для индикации и контроля ее нормального функционирования. При выходе корректирующей информации за допустимые пределы вырабатывается сигнал тревоги. Наиболее важным является сигнал тревоги при отклонении обсервационных координат от эталонных свыше допустимого предела.

Рис.5.6. Функциональная схема ККС ГЛОНАСС/GPS
Контрольная станция (КС на РЦУСе) принимает информацию о работе системы, локализует места сбоев и отказов и вырабатывает соответствующие корректирующие воздействия. Она управляет установкой и изменением параметров оборудования, сохраняет информацию о работе ККС. Станция удаленного контроля (СУК в Темрюке) принимает информацию о работе системы, управляет установкой и изменением параметров оборудования. Радиомаяк Дооба обеспечивает усиление сигнала MSK модулятора и излучение его в эфир.
Блок сопряжения РМк, КС, БПВ основных и резервных комплектов ОС, СИК размещается в стандартной 19” стойке размером 6008002000 мм. Вид её панели показан на рис.5.7.

Рис.5.7. Передняя панель стойки ККС, установленной на Дообе и в Темрюке.
Назначение и устройство составных частей ККС. Опорная станция (ОС) предназначена для выработки дифференциальных поправок для всех находящихся в зоне радиовидимости НКА, формирования корректирующей информации и передачи сообщений в формате RTCM через встроенный MSK модулятор по коаксиальной линии к передатчику радиомаяка. ОС состоит из БПВ, антенны GNSS и комплекта кабелей. Структурная схема ОС приведена на рис.5.8. БПВ имеет два порта для связи с КС. Порт УПРАВЛЕНИЕ (разъем Х8) предназначен для информационного обмена по протоколу RSIM. Через этот порт осуществляется установка всех параметров, перезапуск, выдача информации о параметрах работы.

Рис. 5.8. Структурная схема Опорной станции (ОС) Дооба.
Порт РЕГИСТРАЦИЯ (разъем Х6) предназначен для выдачи данных на регистрацию. Порт ОБРАТНАЯ СВЯЗЬ (разъем Х7) предназначен для организации обратной связи с СИК. Порт RTCM КАНАЛ 1(разъем Х9) предназначен для передачи сообщений в формате RTCM на MSK-модулятор (разъем Х10). Кабели антенны GNSS пристыковываются к разъемам Х4 (сигналы НКА) и Х3 (сигнал имитатора). К выходу MSK модулятора (разъем Х5) подключается кабель, идущий на передатчик радиомаяка.
Станция интегрального контроля [22,25]. Станция интегрального контроля предназначена для обеспечения контроля целостности диффподсистемы ГЛОНАСС/GPS. Контроль целостности состоит из процесса наблюдения и процесса контроля. Контролируются следующие величины:
- характеристики MSK сигналов;
- сообщения RTCM;
- точность корректируемых псевдодальностей;
- результирующие координаты, полученные с использованием скорректированных псевдодальностей.
Функции контроля целостности состоят в гарантировании того, что показатели качества контролируемых величин соответствуют их реальной точности. СИК состоит из блока приемо‑вычислителя, антенны GNSS, антенны диффприемника и комплекта кабелей. Структурная схема СИК приведена на рис.5.9. Блок приемо‑вычислителя имеет два порта для связи с КС. Порт УПРАВЛЕНИЕ (разъем Х8) предназначен для информационного обмена по протоколу RSIM. Через этот порт осуществляется установка всех параметров, перезапуск, выдача информации о параметрах работы. Порт РЕГИСТРАЦИЯ (разъем Х6) предназначен для выдачи данных на регистрацию. Порт ОБРАТНАЯ СВЯЗЬ (разъем Х7) предназначен для организации обратной связи с ОС. Порт RTCM КАНАЛ 1 (разъем Х9) предназначен для приема сообщений и управления диффприемником (разъем Х10).
Кабели антенны GNSS пристыковываются к разъемам Х4 (сигналы НКА) и Х3 (сигнал имитатора). Кабель антенны диффприемника пристыковывается к разъему Х5.

Рис.5.9. Структурная схема СИК Дооба.
Контрольная станция (КС) [19,23] предназначена для оперативного контроля состояния и управления функционированием ККС с заданными характеристиками. КС состоит из компьютера индустриального исполнения специальной конфигурации, которую образуют: плата расширителя на восемь портов (С218 turbo), плата защиты от сбоев (WDT 01) и плата аналого-цифрового преобразователя (PCL818 HD) совместно с блоком сопряжения РМк и оснащенного специальным программным обеспечением.
Для обеспечения удаленного контроля и управления ККС предусмотрено подключение удаленной КС. Связь производится через сетевую плату, распределитель, маршрутизатор, модем и далее радиорелейную линию. Постоянная связь между КС, ОС и СИК поддерживается в соответствии с протоколом RS 232. КС производит установку и прием следующих данных:
На ОС устанавливаются следующие параметры:
- частота радиопередачи;
- скорость передачи информации;
- эталонные координаты;
- угол возвышения НКА для которых необходимо передавать диффпоправки;
- номер ОС;
- минимальное количество отслеживаемых НКА;
- максимальное значение поправки псевдодальности;
- максимальное значение скорости изменения псевдодальности.
При этом ОС получает данные: о состоянии НКА (по данным СНС); о состоянии системы (работоспособна/неработоспособна); о слежении за КА (азимут, высота, отношение сигнал/шум); о корректирующей информации (поправка псевдодальности PRC, поправка скорости изменения псевдодальности RRC, погрешность дифференциальной дальности потребителя UDRE, набор данных IOD, модифицированный Z-отсчет); о выработке сигналов тревог (недостаточное количество НКА, нет подтверждения от СИК о нормальной работе, превышение порога поправок псевдодальностей, превышение порога поправок скорости изменения псевдодальностей).
Для СИК ведётся установка параметров:
- номер наблюдаемой ОС;
- координаты СИК;
- максимальное время устаревания поправок;
- наблюдаемой частоты передачи;
- скорости передачи информации;
- сигнальных порогов и интервалов наблюдений (время устаревания поправок, процент ошибочных принятых сообщений MSK, уровень передаваемого сигнала, отношение сигнал/шум, номера НКА, величина геометрического фактора (HDOP), погрешность плановых координат, недостаточная точность UDRE).
Получение данных о характеристиках СИК:
- показатель качества коррекции,
- время устаревания поправок,
- погрешности координат (широта, долгота, высота),
- геометрические факторы (PDOP, HDOP, VDOP),
- количество НКА, используемых для решения навигационной задачи.
О состоянии линии передачи данных через радиомаяк:
- уровень сигнала,
- соотношение сигнал/шум,
- процент ошибочных сообщений,
- время устаревания поправок.
О сигналах тревог:
- большое время устаревания поправок,
- высокий процент ошибочных сообщений,
- низкий уровень передаваемого сигнала,
- низкое отношение сигнал/шум,
- недостаточное количество наблюдаемых НКА,
- большое значение HDOP,
- большая погрешность плановых координат.
На основе постоянного анализа параметров, установленных оператором и получаемых текущих данных от ОС, СИК и РМк, КС производит выработку сигналов и управляющих воздействий, направленных на поддержание технических характеристик ККС на заданном уровне. Полное описание устройства и функционирования КС приведено в ТДЦК.461513.033 РЭ.
Описание и работа опорной станции Дооба. ОС предназначена для выработки диффпоправок для всех судов, находящихся в зоне ККС, формирования корректирующей информации и передачи сообщений в формате RTCM. Передача осуществляется через встроенный MSK-модулятор по коаксиальной линии к передатчику радиомаяка. На опорной станции обеспечивается решение следующих задач:
- выработка дифференциальных поправок для всех НКА СНС ГЛОНАСС и GPS, находящихся в зоне радиовидимости ОС, раздельно и по смешанному созвездию;
- проведение автономного контроля работоспособности НКА;
- формирование сообщений в соответствии со стандартами RTCM SC-104 версия V2.2 для функционирования GNSS в дифференциальном режиме;
- формирование MSK-сигнала для передачи корректирующей информации на РМк;
- оценка качества вырабатываемой КИ и выдача предупреждений в СИК и КС в аномальных случаях;
- автоматический контроль функционирования;
- автоматическая привязка приемных антенн в системах координат ПЗ-90 и WGS-84 по серии наблюдений с СКП не хуже 1 м по каждой из трех координат;
- ввод и редактирование исходных данных с клавиатуры;
- отображение необходимой информации на дисплее;
- выдача данных о результатах работы для архивирования;
- включение в область заголовка состояния работоспособности станции (следующего полного передаваемого сообщения RTCM) реакции на предупреждение от СИК о признаке аномальных координат;
- включение в область PRC/RRC полного передаваемого сообщения RTCM (1, 31 или 9, 34) состояния “не использовать данный спутник” при поступлении предупреждения от СИК об аномальной псевдодальности;
- включение в область заголовка сообщения RTCM реакции на сигнал отсутствия контроля от СИК;
- обмен информационно-управляющими RSIM сообщениями с КС и СИК.
Технические характеристики и рабочие условия для ОС Дооба. Точность измерения и выработки дифференциальных поправок должна быть не хуже:
СКП измерения псевдодальности 0,3 м;
СКП измерения псевдоскорости 0,04 м/с;
СКП формирования поправок к псевдодальности 0,35 м;
СКП формирования поправок к псевдоскорости 0,05 м/с.
Количество каналов приемника ГЛОНАСС/GPS – 28;
Тип принимаемого сигнала СНС ГЛОНАСС: ПТ, F1;
СНС GPS: С/А, LI;
Интерфейсы:
Тип портов RS-232;
Количество последовательных портов 4;
Оценка погрешности дифференциальной дальности (UDRE) отличается не более, чем на 20 % от фактического значения СКП псевдодальности. (Передается в RTCM-сообщениях 1,31 или 9,34). Время готовности к работе (первое определение после включения): не более 2 мин. при прогретом ОГ. Время задержки RTCM сообщения от момента формирования до момента начала передачи менее 1 с.
Типы принимаемых и передаваемых сообщений в соответствии со:
а) стандартом RTCM для функционирования GNSS в дифференциальном режиме, версия 2.2;
б) стандартом RTCM для ОС и СИК (RSIM), версия 1.1.
Внешние воздействия:
|
- диапазон ра6очих температур: |
|
|
для БПВ |
от 0 °С до 50 °С; |
|
для антенны |
от минус 40 °С до 65 °С; |
|
- предельные температуры: |
|
|
для БПВ: повышенная |
плюс 60 °С; |
|
пониженная |
минус 20 °С; |
|
для антенны: повышенная |
плюс 75 °С; |
|
пониженная |
минус 40 °С; |
|
- повышенная относительная влажность при температуре 25 °С: |
95 %; |
|
антенна |
герметичная; |
|
- синусоидальная вибрация: |
|
|
диапазон частот |
от 10 до 100 Гц; |
|
амплитудное ускорение |
9,8 м/с2 (1 g). |
|
- напряжение питания: |
|
|
от сети переменного тока |
(220 +22/-33) В, (50±2,5) Гц; |
|
от сети постоянного тока |
(27±6) В. |
|
- потребляемая мощность: |
не более 30 Вт; |
|
- габаритные размеры и масса БПВ: |
|
|
габариты |
428,6462130 мм; |
|
масса |
не более 4,7 кг; |
|
- характеристики MSK-модулятора: |
|
|
диапазон частот MSK-модулятора |
от 283.5 до 325 кГц; |
|
точность несущей частоты MSK-модулятора, менее |
410-6; |
|
уход частоты MSK-модулятора, менее |
l0-6 в год; |
|
уровень выходного сигнала при нагрузке 50 Ом |
0,5 B 0,1 B; |
|
- электромагнитная совместимость |
со всеми радиосредствами порта. |
ОС сохраняет работоспособность при наличии гармонических помех на входе приемника с уровнями мощности не более указанных в таблице 5.2 (выполняется на ОС в Темрюке и на Дообе.
Таблица 5.2 Уровни мощности гармонической помехи в полосе частот 1 МГц
|
Контрольная частота, МГц |
Мощность помех, дБ/Вт |
|
от 321,2 до 1445,4 |
-23 |
|
от 1445,4 до 1525,7 |
От -23 до -74 |
|
от 1525,7 до 1565,42 |
от –74 до –135* |
|
от 1565,42 до 1610 |
-135 |
|
от 1610 до 1615 |
от –135 до –75* |
|
от 1615 до 1660,5 |
От –75 до –23 |
|
от 1660,5 до 1686,3 |
–23* |
|
от 1686,3 до 1766,6 |
-23 |
|
от 1766,6 до 4818 |
-23 |
|
Примечание: * – значения линейно изменяются в указанном диапазоне | |
ОС сохраняет работоспособность при наличии импульсных помех на входе приемника с уровнем пиковой мощности минус 30 дБ/Вт в основной полосе приемника по уровню минус 3 дБ, длительностью 100 мкс и скважностью 10.
Примечание: Указанные значения основаны на предположении, что СИК располагается на расстоянии 100 м от источника гармонических помех и на расстоянии 1000 м от источников импульсных помех. Значения уровня мощности помех, при которых СИК остается работоспособной, зависят от расстояния до источника помех и могут быть определены по формуле: Р1=Р-20lg(D2/D1), где Р1 (дБВт) – новые значения мощности помех в 1 МГц на входе приемника; Р(дБВт) – значение мощности помех в 1 МГц на входе приемника в соответствии с таблицей 1; D1, м – принятое типовое расстояние до источника помех (100 м для источника гармонических помех или 1000 м для источника импульсных помех); D2, м – требуемое расстояние.
Уровни мощности помех, создаваемых ОС в цепях электропитания, управления и коммутации в полосе частот от 0,01 до 100 МГц, не должны превышать значений, рассчитанных по формулам:
U (0,01 – 0,15) = 80 – 28,9 lg(f/0,01);
U (0,15 – 0,5) = 66 – 22,97 lg(f/0,15);
U (0,5 – 6) = 54 – 12,97 lg(f/0,5);
U (6 – 100) = 80, где f – частота, МГц.
ОС обеспечивает работоспособность после воздействия на входные цепи помехи мощностью до 1 Вт в полосе пропускания радиоприемного устройства.
Комплект поставки ОС. Комплект поставки ОС приведен в таблице 5.3.
Таблица 5.3. Комплектация поставки ОС Дооба.
|
Наименование |
Обозначение |
Количество | |
|
Блок приемо-вычислителя |
ПКАН.467855.032 |
1 шт. | |
|
Антенна |
ПКАН.464651.004 |
1 шт. | |
|
Комплект кабелей |
ПКАН.461951.053 |
1 комплект | |
|
Руководство по эксплуатации |
ТДЦК.461513.031 РЭ |
1 шт. | |
|
Паспорт |
ТДЦК.461513.031 ПС |
1 шт. | |
|
Упаковка |
ПКАН.461956.044 |
1 шт. | |
Описание ОС Дооба. ОС вырабатывает корректирующую информацию по сигналам НКА СНС ГЛОНАСС и GPS и передает ее потребителям, работающим в дифференциальном режиме. Дифференциальный метод основан на идентичности условий, влияющих на точность определения местоположения приемника ГЛОНАСС/GPS ОС и навигационных приемников потребителей.
ОС размещается в точке с известными координатами, измеряет псевдодальности до всех “видимых” НКА и вычисляет дифференциальные поправки к псевдодальностям (разность между измеренными и рассчитанными в ОС значениями псевдодальностей) и скорости их изменения, а также формирует стандартные RTCM-сообщения, содержащие эти поправки, и передает их по коаксиальной линии к передатчику РМк в виде MSK-сигнала. Далее поправки по эфиру передаются потребителям.
В состав ОС входит:
блок приемо-вычислителя;
антенна;
комплект кабелей.
Структурная схема ОС приведена на рис.5.10.
Блок приемо-вычислителя
БПВ предназначен для обработки сигналов, принятых антенной GNSS, вычисления координат, выработки КИ и выдачи MSK-сигнала в радиолинию РМк.
Антенна
Антенна обеспечивает приём сигналов НКА СНС ГЛОНАСС и GPS в диапазоне от 1570 до 1610 МГц, их усиление и фильтрацию.
Для калибровки радиоприемного устройства в диапазоне рабочих частот приема предусмотрен имитационный сигнал. Имитационный сигнал поступает на входной разъем Х2“И” антенны с БПВ по второму высокочастотному кабелю.
Комплект кабелей
Комплект кабелей обеспечивает подключение к питающей сети и соединение БПВ с антеннами и передачи MSK-сигналов в РМк.
Описание составных частей ОС. Блок приемо‑вычислителя.
БПВ состоит из:
- 28 – канального датчика GNSS;
- контроллера;

Рис.5.10. Структурная схема ОС Дооба.
- MSK-демодулятора;
- блока передней панели;
- блока питания;
- узла коммутации.
Электропитание БПВ: напряжение питания (220 +22/-33)В;
напряжение резервного питания (27±6) В;
потребляемая мощность 30 Вт.
28-канальный датчик GNSS . 28-канальный датчик (далее датчик) предназначен для приема, обработки сигналов, поступающих с антенны, и вычисления координат.
24 канала приемника используются для приема информации от спутников, 4 канала – резервные и могут стать основными при сбое основных каналов. Функционально датчик состоит из радиоприемного устройства и навигационного процессора:
РПУ выполняет функции приема и первичной цифровой обработки сигналов, а также формирования имитационных сигналов СНС и выдачи их в антенну для калибровки РПУ. Модуль навигационного процессора выполняет функции обработки данных от РПУ и решения навигационной задачи.
Радиоприемное устройство состоит из аналогового и цифрового трактов. Аналоговый тракт состоит из трех частей:
- малошумящего усилителя (МШУ);,
- высокочастотного тракта;
- тракта промежуточной частоты.
МШУ предназначен для фильтрации помех и компенсации потерь сигнала в коаксиальной линии связи. Конструктивно он расположен в антенне. В состав МШУ входят: полосовые радиочастотные фильтры, ограничитель больших сигналов, усилители радиочастоты с низким уровнем шумов.
Высокочастотный тракт предназначен для:
а) фильтрации помех на радиочастоте;
б) усиления сигналов на радиочастоте до смесителя;
в) переноса спектра рабочих частот приема в диапазон промежуточных частот;
г) фильтрации помех на промежуточной частоте;
д) усиления сигналов на промежуточной частоте. Высокочастотный тракт расположен в блоке ВЧ.
Тракт промежуточной частоты предназначен для:
а) фильтрового разделения спектров принимаемых сигналов СНС ГЛОНАСС и GPS;
б) переноса спектра сигналов СНС ГЛОНАСС в диапазон частот от 5 до 18 МГц;
в) формирования широкополосных сигналов СНС ГЛОНАСС в диапазоне частот от 5 до 18 МГц и GPS на частоте 20, 42 МГц с трехуровневым квантованием сигналов на выходе;
г) синтезирования опорных и гетеродинных сигналов.
Тракт промежуточной частоты собран на плате синтезатора.
Цифровой тракт РПрУ предназначен для:
а) преобразования широкополосных сигналов на промежуточных частотах (5 – 23) МГц в сигналы с "нулевой" несущей;
б) корреляционной свертки широкополосных сигналов;
в) поиска и обнаружения принимаемых сигналов на фоне шумов и помех;
г) помехоустойчивого узкополосного слежения по фазе дальномерного кода и по фазе несущей частоты;
д) помехоустойчивого выделения эфемеридной информации;
е) получения отсчетов псевдодальности, доплеровского смещения несущей частоты и эфемеридной информации;
ж) формирования сетки частот, синхронизирующих работу составных частей цифрового тракта.
Цифровой тракт собран на плате ЦОС. Дополнительно плата ЦОС предназначена для формирования имитационных сигналов спутников систем ГЛОНАСС и GPS. Имитационные сигналы по отдельному высокочастотному кабелю поступают в антенну и далее по основному приёмному тракту в БПВ.
Модуль навигационного процессора реализован на плате навигационного процессора и предназначен для:
а) обработки данных от РПУ с целью получения текущих координат места или вычисления дифференциальных поправок к псевдодальностям для всех "видимых" НКА;
б) прогноза сеансов связи с НКА;
в) управления режимами работы РПрУ, оценки стабильности частоты ОГ;
г) выполнения обмена информацией через последовательный интерфейс;
д) контроля работоспособности и диагностики ОС.

Рис.5.11. Внешний вид задней панели блока ОС Дооба.
Контроллер. Контроллер предназначен для организации обмена информацией между функциональными узлами БПВ, а также КС и ОС. Конструкция контроллера обеспечивает:
- установку и коммутацию "разъем в разъем" платы процессора датчика GNSS,
- установку и коммутацию "разъем в разъем" платы КВУ-386,
- разводку питания от ВИП ко всем узлам и блокам БПВ.
Функциональная схема информационных связей контроллера приведена на рис.5.12.

Рис.5.12. Функциональная схема контроллера ОС Дооба.
1. Порт СОМ1 КВУ-386, через разъем Х8 БПВ "УПРАВЛЕНИЕ", обеспечивает прием команд от КС и выдачу в КС состояния ОС. Двунаправленная связь с КС осуществляется по протоколу RSIM, (скорость обмена 9600 бит/с).
2. Порт СОМ1 датчика GNSS, через разъем Х6 БПВ "РЕГИСТРАЦИЯ" обеспечивает передачу данных в КС для архивирования и управления режимами работы датчика GNSS. Двунаправленная связь КС с датчиком GNSS осуществляется по протоколу BINR (RSIM), (скорость обмена 19200 бит/с).
3. Порт СОМ3 КВУ-386, через разъем Х7 БПВ "ОБРАТНАЯ СВЯЗЬ", обеспечивает выдачу информации в СИК. Передача осуществляется по протоколу RSIM, скорость обмена 9600 бит/с).
4. Порт СОМ4 КВУ-386, через разъем Х9 БПВ "RTCM КАНАЛ1", обеспечивает выдачу диффпоправок в MSK-модулятор. Выдача осуществляется по протоколу RTСM, (скорость обмена 9600 бит/с), а также установка режимов работы модулятора и чтение установленных параметров. Двунаправленная связь с MSK-модулятором осуществляется по протоколу RSIM.
5. Обмен информацией с блоком передней панели осуществляется через плату управления контроллера.
Блок передней панели ОС.
БПП предназначен для:
- вывода и отображения 80 алфавитноцифровых, точечноматричных символов (знакомест) информации на ЖКИ БПВ;
- формирования кодов клавиш при работе потребителя с клавиатурой;
- подачи звуковой сигнализации.
БПП состоит из узла звуковой сигнализации, платы передней панели и модуля ЖКИ. Структурная схема БПП приведена на рис.5.13.

Рис.5.13. Структурная схема блока передней панели ОС.
На плате передней панели размещены 10 цифровых и 13 функциональных клавиш, схема управления контрастностью индикатора модуля ЖКИ, схема управления подсветкой индикатора модуля ЖКИ.
MSK-модулятор
MSK-модулятор преобразует полученные через контроллер с 28-канального датчика сообщения в формате RTCM в MSK-сигналы для передачи в РМк.
Управление MSK-модулятором осуществляется по протоколу RSIM.
Блок питания аппаратуры ОС.
БП предназначен для преобразования входного напряжения в напряжение, необходимое для питания всех узлов ОС. Блок питания состоит из двух блоков: сетевого адаптера ПКАН.436617.012 и платы ВИП ПКАН.4366634.018. При отказе сети переменного тока СА осуществляет автоматическое переключение на резервный источник постоянного тока. Функциональная схема БП приведена на рис.5.14.

Рис.5.14. Функциональная схема БП аппаратуры ОС.
БП сохраняет работоспособность при напряжении на входе:
- переменного тока от 99 до 242 В;
- постоянного тока от 21 до 33 В,
обеспечивая при этом параметры выходных напряжений согласно таблице 5.4.
Таблица 5.4. Параметры блока питания
|
Выходное напряжение, В |
Выходной ток, А |
Пределы изменения выходного напряжения, В. |
Уровень пульсаций, мВ |
|
+15 |
0.2 |
+3/-2 |
300 |
|
+12 |
0.65 |
+/-0.6 |
15 |
|
+5 |
4.0 |
+/-0.2 |
40 |
Узел коммутации ОС. Узел коммутации состоит из разъемов, тумблеров, предохранителей и клемм заземления, через которые на блок приёмо-вычислителя (БПВ) поступает электропитание, а также интерфейсных и высокочастотных разъемов, через которые БПВ связан с ОС, КС и антенной. Переключатель “СЕТЬ 220 В“ предназначен для подачи переменного напряжения. Положение “1” – питание включено, положение “0” – питание выключено. Переключатель “27 В“ предназначен для подачи постоянного напряжения.
Предохранители FU1, FU2 – (вставка плавкая ВП2Б-1В) защищают БПВ от перегрузки в сети переменного напряжения. Предохранитель FU3 (вставка плавкая ВП2Б-1 В) защищает БПВ от перегрузки в сети напряжения постоянного тока. Разъем “Х1“ предназначен для подключения к электропитанию 220 В. Разъем “Х2” предназначен для подключению к электропитанию +27 В. Нумерация контактов и названия цепей в разъемах Х1, Х2 приведены в таблице 5.5.
Разъем “Х3” (розетка TNC R143324)– "АНТЕННА ИМИТ." предназначен для подключения ВЧ кабеля антенны имитатора (вход ”И” антенны). Разъем “Х4” (розетка–TNC R143324)- "АНТЕННА GNSS" предназначен для подключения ВЧ кабеля антенны GNSS (вход ”А” антенны).
Таблица 5.5. Нумерация контактов и названия цепей разъемов БПВ в ОС.
|
Разъем ”Х1” Вилка РН3-ВМ |
Разъем ”Х2” Вилка 2РМГ14Б4Ш1Е2 | ||
|
Контакт |
Цепь |
Контакт |
Цепь |
|
1 |
220 В |
1 |
КОРПУС |
|
2 |
220 В |
2 |
GND |
|
3 |
КОРПУС |
3 |
27 В |
Разъем “Х5”: (переход CР-50-75 ФВ) РМК предназначен для подключения кабеля радиомаяка. Через разъем “Х7”– "ОБРАТНАЯ СВЯЗЬ", БПВ принимает информацию от СИК. Через разъемы “Х6”, “Х8”– "РЕГИСТРАЦИЯ", "УПРАВЛЕНИЕ", происходит обмен информацией БПВ с КС. Через разъемы “Х9”, “Х10”– "RTCM КАНАЛ1", "RTCM КАНАЛ2" происходит двунаправленный обмен информацией контроллера БПВ с MSK-модулятором. Нумерация контактов и названия цепей разъемов ”Х6”,”Х7”, ”Х8”, ”Х9”, ”Х10” указаны в таблице 5.6.
Таблица 5.6. Нумерация контактов и названия цепей разъемов БПВ в ОС.
|
Разъем ”Х6” Розетка DB-9F |
Разъем ”Х7” Розетка DB-9F |
Разъем ”Х8” Розетка DB-9F |
Разъем ”Х9” Розетка DB-9F |
Разъем ”Х10” Розетка DB-9F | |||||||
|
Контакт |
Цепь |
Кон- такт |
Цепь |
Кон- такт |
Кон- такт |
Контакт |
Цепь |
Кон- такт |
Цепь | ||
|
1 |
- |
|
|
1 |
1 |
1 |
- |
1 |
- | ||
|
2 |
RX0B |
2 |
RX0 |
2 |
2 |
2 |
RXD4 |
2 |
RX5 | ||
|
3 |
TXOB |
3 |
TX0 |
3 |
3 |
3 |
TXD4 |
3 |
TX5 | ||
|
4 |
DTROB |
|
|
4 |
4 |
4 |
DTR4 |
4 |
DTR5 | ||
|
5 |
GND |
5 |
GND |
5 |
5 |
5 |
GND |
5 |
GND | ||
|
6 |
DSROB |
|
|
6 |
6 |
6 |
DSR4 |
6 |
DSR5 | ||
|
7 |
RTSOB |
|
|
7 |
7 |
7 |
RTS4 |
7 |
RTS5 | ||
|
8 |
CTSOB |
|
|
8 |
8 |
8 |
CTS4 |
8 |
CTS5 | ||
|
9 |
RIOB |
|
|
9 |
9 |
9 |
RI4 |
9 |
- | ||
Антенна GNSS в ОС. Антенна предназначена для приёма сигналов НКА ГЛОНАСС и GPS в диапазоне от 1570 до 1610 МГц, их усиления, фильтрации и передачи сигналов в БПВ по высокочастотному кабелю ПКАН.468543.100. Для калибровки радиоприемного устройства в диапазоне рабочих частот приема предусмотрен имитационный сигнал. Имитационный сигнал поступает на входной разъем Х2”И” антенны от БПВ по высокочастотному кабелю ПКАН.468543.100-01. Антенна представляет собой законченную конструкцию, состоящую из излучателя антенного, распределительно-фазового устройства, аттенюатора имитационного сигнала, малошумящего усилителя. Внешний вид антенны приведен на рисунке 5.11.

Рис.5.15. Внешний вид антенны GNSS в ОС
Излучатель антенный – спиральный вибратор, имеющий круговую диаграмму направленности в верхней полусфере. Для подавления эффекта многолучевости внизу антенны установлен ригель, предназначенный для подавления отраженных сигналов НКА с направлений ниже горизонтальной плоскости. Для защиты от воздействия атмосферных осадков антенна закрыта конусообразным радиопрозрачным колпаком. Технические характеристики антенны приведены в таблице 5.7.
Таблица 5.7. Технические характеристики антенны спутниковой станции
|
Параметр |
Значение |
|
Диапазон рабочих частот, МГц |
1570-1610 |
|
КСВН выхода, не более |
2 |
|
Выходное сопротивление, Ом |
50 |
|
Коэффициент усиления антенны, дБ |
(30,52,5) |
|
Коэффициент шума, дБ – не более |
3,5 |
|
Напряжение питания, В |
(11,50,6) |
|
Ток потребления, мА – не более |
36 |
|
Масса, г, не более |
3900 |
|
Диапазон рабочих температур, С |
От –40 до +65 |
|
Предельные температуры: С - пониженная - повышенная |
-40 +75 |
|
Влажность, % при температуре, С |
100 25 |
|
Вибрация: – диапазон частот, Гц - виброускорение, g |
1 – 80 5 |
|
Положение фазового центра |
По центральной оси антенны на расстоянии 75 мм от нижнего среза корпуса |
Комплект кабелей к антеннам ОС. Кабель ВЧ ПКАН.468543.100 (см. рис.5.16.) предназначен для передачи сигналов НКА от антенны GNSS к БПВ.

Рис.5.16. Схема коаксиальных кабелей ПКАН.468543.100 и ПКАН.468543.100-01с оконечными вилками к антеннам ОС.
Кабель ВЧ ПКАН.468543.100-01 предназначен для передачи в антенну GNSS имитационного сигнала для калибровки радиоприемного устройства БПВ. Параметры кабеля ВЧ ПКАН.468543.100-01 идентичны параметрам предыдущего кабеля ВЧ ПКАН.468543.100.
Кабель ПКАН.685623.096 (см. рис.5.17.) предназначен для связи MSK-модулятора с контроллером.
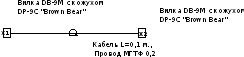
Рис.5.17. Схема коаксиального кабеля ПКАН.685623.096 с оконечными вилками (в системе антенн ОС).
Кабель * ПКАН.685623.098 (см. рис.5.18.) предназначен для связи БПВ с РМк. При установке оборудования на расстоянии от 50 м до 100 м, вместо этого кабеля необходимо использовать кабель РК 50-4-11, а от 100 м до 200 м – кабель РК 50-7-11, которые имеют меньшие погонные потери. Поставка позиций, обозначенных знаком *, оговаривается при заказе.

Рис.5.18. Схема коаксиального кабеля ПКАН.685623.098 с оконечными вилками (от РМк к БПВ ОС).
Для подачи электропитания используется сетевой шнур (см. рис.5.19.), предназначенный для подключения к сети 220 В 50 Гц.

Рис.5.19. Схема сетевого электрического кабеля с оконечными вилкой и розеткой.
Состав передаваемых RTCM сообщений от ККС.
|
N |
Название |
Формирование |
|
1 |
Дифференциальные поправки GPS |
Сообшение содержит дифференциальные попраки псевдоскорости и псевдодальности для всех НКА, находящихся в зоне радиовидимости ОС. Сообщение должно передаваться настолько часто, насколько это возможно. |
|
9 |
Частотные поправки GPS |
Служит для тех же целей, что и сообщение 1, передается не для всех НКА, а для 1-3. Используется при невысокой скорости передачи канала связи и больших радиопомехах в зоне приема. |
|
31 |
Дифференциальные поправки ГЛОНАСС |
То же, что и сообщение 1 для GPS |
|
34 |
Частные поправки ГЛОНАСС |
То же, что и сообщение 9 для GPS |
|
3 |
Параметры ОС GPS |
Содержит координаты X, Y, Z ОС в системе WGS-84. |
|
32 |
Параметры ОС ГЛОНАСС |
То же, что и сообщение 3 для GPS, опорным эллипсоидом является SGS-90 (ПЗ-90) |
|
5 |
Техническое состояние НКА GPS |
Сообщение содержит информацию о состоянии одного или более НКА GPS. Необходимость передачи определяется СИК (обычно при обнаружении неисправности какого-либо спутника). |
|
33 |
Техническое состояние НКА ГЛОНАСС |
То же, что сообщение 5 для GPS |
|
7 |
Альманах радиомаяков GPS |
Обеспечивает данные о местоположении, частотах, дальности действия и состояния сети морских радиомаяков, оборудованных средствами передачи поправок GPS. Формируется в среднем один раз в 10 минут либо при обнару- жении неисправности какого-либо радиомаяка.
|
|
35 |
Альманах радиомаяков ГЛОНАСС |
То же, что и сообщение 7 для GPS |
|
16 |
Специальное сообщение GPS |
Специальное сообщение в текстовом формате длиной до 90 символов. Применяется при необходимости передать пользователям текстовую информацию о радиомаяке GPS, например, о предстоящих регламентных работах
|
|
36 |
Специальное сообщение ГЛОНАСС |
То же, что и сообщение 16 для GPS |
|
37 |
Сдвиг системного времени GNSS |
Сообщает пользователям информацию о сдвиге между системным временем GPS и ГЛОНАСС для совместного использования поправок к этим НКА. Частота передачи определяется скоростью изменения этого сдвига. |
Станция интегрального контроля СН3502 Дооба. Назначение. Станция интегрального контроля (СИК) предназначена для непрерывного контроля рабочих параметров ОС и РМк. СИК принимает радиосигналы РМк и НКА и проводит оценку контролируемых параметров. При выходе значений контролируемых параметров за допустимые пределы вырабатывается сигналы тревог. СИК обеспечивает решение следующих задач (обращаем внимание на соответствие основных характеристик с ОС):
- прием радиосигналов РМк и оценка состояния канала передачи КИ;
- оценка качества КИ, сформированной ОС;
- обмен информационно-управляющими RSIM – сообщениями с ОС и КС;
- автоматический контроль функционирования;
- ввод и редактирование исходных данных с клавиатуры;
- отображение необходимой информации на дисплее;
- выдача данных о результатах работы для архивирования;
- контроль целостности (достоверности навигационных определений на требуемом уровне) СНС;
- автоматическая привязка приемных антенн в системах координат ПЗ-90 и WGS-84 по серии наблюдений с СКП не хуже 1 м по каждой из трех координат.
Технические характеристики и рабочие условия. Точность измерения дифференциальных поправок:
|
- |
СКП измерения псевдодальности до НКА, не хуже |
0,3 м; |
|
- |
СКП измерения псевдоскорости, не хуже |
0,04 м/с. |
|
- |
время готовности к работе |
|
|
|
(первое определение после включения): |
не более 2 мин. (при прогретом ОГ) |
|
- |
время выработки сигнала тревоги при превышении порога по разности псевдодальностей, погрешности плановых координат и величине HDOP: не более |
0,25 с. |
|
- |
количество каналов приемника ГЛОНАСС/GPS: |
28 |
|
- |
тип принимаемого сигнала СНС: |
ГЛОНАСС: ПТ, F1; |
|
- |
|
GPS: С/А, L1; |
|
- |
интерфейсы: тип портов RS-232; количество портов |
4; |
- типы принимаемых и передаваемых сообщений в соответствии со: а) стандартом RTCM для функционирования GNSS в дифференциальном режиме, версия 2.2; б) стандартом RTCM для ОС и СИК (RSIM), версия 1.1.
Внешние воздействия:
- диапазон ра6очих температур:
для БПВ от 0 °С до 50 °С;
для антенны от минус 40 °С до 65 °С;
- предельные температуры:
для БПВ: повышенная плюс 60 °С;
пониженная минус 20 °С;
для антенны: повышенная плюс 75 °С;
пониженная минус 40 °С;
предельная относительная влажность при температуре 25°С 95 %;
- антенна герметичная;
- синусоидальная вибрация:
диапазон частот от 10 до 100 Гц;
амплитудное ускорение 9,8 м/с2 (1 g);
- напряжение питания:
от сети переменного тока (220 +22/-33) В, (50±2,5) Гц;
от сети постоянного тока (27±6) В;
- потребляемая мощность: не более 30 Вт;
- габаритные размеры и масса БПВ:
габариты 428,6462130;
масса не более 7 кг.
Характеристики встроенного MSK-приемника:
- диапазон частот 283.5 – 325 кГц;
- прием сигнала с силой электрического поля от 1 до 24 В/м 1,25 B;
- вероятность ошибочного приема информации 10 –3.
Электромагнитная совместимость. СИК контроля сохраняет работоспособность при наличии гармонических помех на входе приемника с уровнями мощности не более указанных в таблице 5.8. СИК сохраняет работоспособность при наличии импульсных помех на входе приемника с уровнем пиковой мощности минус 30 дБВт в основной полосе приемника по уровню минус 3 дБ, длительностью 100 мкс и скважностью 10.
Таблица 5.8. Уровни мощности гармонической помехи в полосе частот 1 МГц
|
Контрольная частота, МГц |
Мощность помех, дБ/Вт |
|
от 321,2 до 1445,4 |
-23 |
|
от 1445,4 до 1525,7 |
От -23 до –74 |
|
от 1525,7 до 1565,42 |
от –74 до –135* |
|
от 1565,42 до 1610 |
-135 |
|
от 1610 до 1615 |
от –135 до –75* |
|
от 1615 до 1660,5 |
От –75 до –23 |
|
от 1660,5 до 1686,3 |
–23* |
|
от 1686,3 до 1766,6 |
-23 |
|
от 1766,6 до 4818 |
-23 |
|
Примечание: * – значения линейно изменяются в указанном диапазоне | |
Примечание: Указанные значения основаны на предположении, что СИК располагается на расстоянии 100 м от источника гармонических помех и на расстоянии 1000 м от источников импульсных помех.
Значения уровня мощности помех, при которых СИК остается работоспособной, зависят от расстояния до источника помех и могут быть определены по формуле:
Р1=Р-20 lg(D2/D1),
где Р1, дБ/Вт – новые значения мощности помех в 1 МГц на входе приемника; Р, дБВт – значение мощности помех в 1 МГц на входе приемника в соответствии с таблицей 1; D1, м – принятое типовое расстояние до источника помех (100 м для источника гармонических помех или 1000 м для источника импульсных помех); D2, м – требуемое расстояние.
Уровни мощности помех, создаваемых СИК в цепях электропитания, управления и коммутации в полосе частот от 0,01 до 100 МГц, не превышают значений, рассчитанных по формулам:
U (0,01 – 0,15) = 80 – 28,9 lg(f/0,01);
U (0,15 – 0,5) = 66 – 22,97 lg(f/0,15);
U (0,5 – 6) = 54 – 12,97 lg(f/0,5);
U (6 – 100) = 80,
где f – частота, МГц.
СИК обеспечивает работоспособность после воздействия на входные цепи помехи мощностью до 1 Вт в полосе пропускания радиоприемного устройства.
Комплект поставки СИК. Комплект поставки СИК приведен в таблице 5.9.
Таблица 5.9. Комплект поставки СИК
|
Блок приемо-вычислителя |
ПКАН.467855.033 |
1 шт. |
|
Антенна |
ПКАН.464651.004 |
1 шт. |
|
Антенна MSK |
АК-1 |
1 шт. |
|
Комплект кабелей |
ПКАН.461951.053-01 |
1 комп. |
|
Руководство по эксплуатации |
ТДЦК.461513.032 РЭ |
1 шт. |
|
Паспорт |
ТДЦК.461513.032 ПС |
1 шт. |
|
Упаковка |
ПКАН.461956.044-01 |
1 шт. |
Описание СИК. Принцип работы. СИК устанавливается в месте с известными координатами в непосредственной близости с ОС. В процессе работы СИК осуществляет определение координат по сигналам НКА СНС ГЛОНАСС и GPS, находящимся в зоне радиовидимости СИК, с учетом принимаемых дифпоправок. Оценив уровень точности КИ и другие параметры, СИК передает результаты оценки в ОС и КС для подтверждения работоспособности или неработоспособности ОС и РМк, а также выдает сигналы тревоги в аномальных случаях.
Контролируемые параметры:
- характеристики MSK-сигнала;
- сообщения RTCM;
- точности корректируемых псевдодальностей и скоростей их изменения;
- результирующие координаты, полученные с использованием скорректированных псевдодальностей;
- возраст поправок.
Структурная схема СИК приведена на рисунке 5.20.

Рис.5.20. Структурная схема СИК.
Блок приемо-вычислителя. БПВ обеспечивает решение следующих задач:
непрерывное слежение за сигналами НКА ГЛОНАСС и GPS и контролируемого РМка. Определение текущих координат с учетом диффпоправок. Анализ расхождения текущих значений координат, уровня и отношения сигнал/шум MSK-сигнала, количества отслеживаемых НКА ГЛОНАСС и GPS с пороговыми значениями и выдача сигналов тревог в ОС и КС в аномальных случаях.
Антенна GNSS
Антенна обеспечивает приём сигналов НКА СНС ГЛОНАСС и GPS в диапазоне от 1570 до 1610 МГц, их усиление и фильтрацию. Для калибровки радиоприемного устройства в диапазоне рабочих частот приема предусмотрен имитационный сигнал. Имитационный сигнал поступает на входной разъем Х2“И” антенны с БПВ по второму высокочастотному кабелю. Антенна MSK обеспечивает прием радиосигналов РМк. Она укомплектована кабелями. Комплект кабелей обеспечивает подключение к питающей сети и соединение БПВ с антеннами и ОС.
Описание составных частей СИК. Блок приемо‑вычислителя (БПВ) состоит из:
- 28-канального датчика GNSS;
- контроллера;
- MSK-демодулятора;
- блока передней панели;
- блока питания;
- узла коммутации.
Функциональная схема БПВ приведена на рис.5.21, а внешний вид БПВ приведен на рис.5.22. Электропитание БПВ:
- напряжение питания (220 +22/-33) В;
- напряжение резервного питания (27±6) В;
- потребляемая мощность 30 Вт.
28-канальный датчик GNSS (далее датчик) предназначен для приема, обработки сигналов, поступающих с антенны, и вычисления координат. Его 24 приёмных канала используются для приема информации от спутников, 4 канала – резервные и могут стать основными при сбое основных каналов. Функционально датчик состоит из радиоприемного устройства и навигационного процессора. РПУ выполняет функции приема и первичной цифровой обработки сигналов, а также формирования имитационных сигналов СНС и выдачи их в антенну для калибровки РПУ.
Модуль навигационного процессора выполняет функции обработки данных от РПУ и решения навигационной задачи. Радиоприемное устройство состоит из аналогового и цифрового трактов.
Аналоговый тракт состоит из трех частей:
- малошумящего усилителя (МШУ);
- высокочастотного тракта;
- тракта промежуточной частоты.
МШУ предназначен для фильтрации помех и компенсации потерь сигнала в коаксиальной линии связи. МШУ конструктивно расположен в антенне. В состав МШУ входят: полосовые радиочастотные фильтры, ограничитель больших сигналов, усилители радиочастоты с низким уровнем шумов.
Высокочастотный тракт предназначен для:
а) фильтрации помех на радиочастоте;
б) усиления сигналов на радиочастоте до смесителя;
в) переноса спектра рабочих частот приема в диапазон промежуточных частот;
г) фильтрации помех на промежуточной частоте;
д) усиления сигналов на промежуточной частоте.
Высокочастотный тракт расположен в блоке ВЧ.
Тракт промежуточной частоты предназначен для:
а) фильтрового разделения спектров принимаемых сигналов СНС ГЛОНАСС и GPS;
б) переноса спектра сигналов СНС ГЛОНАСС в диапазон частот от 5 до 18 МГц;
в) формирования широкополосных сигналов СНС ГЛОНАСС в диапазоне частот от 5 до 18 МГц и GPS на частоте 20,42 МГц с трехуровневым квантованием сигналов на выходе;
г) синтезирования опорных и гетеродинных сигналов.
Тракт промежуточной частоты собран на плате синтезатора.
Цифровой тракт РПУ предназначен для:
а) преобразования широкополосных сигналов на промежуточных частотах (5–23) МГц в сигналы с "нулевой" несущей;
б) корреляционной свертки широкополосных сигналов;
в) поиска и обнаружения принимаемых сигналов на фоне шумов и помех;
г) помехоустойчивого узкополосного слежения по фазе дальномерного кода и по фазе несущей частоты;
д) помехоустойчивого выделения эфемеридной информации;
е) получения отсчетов псевдодальности, доплеровского смещения несущей частоты и эфемеридной информации;
ж) формирования сетки частот, синхронизирующих работу составных частей цифрового тракта.
Цифровой тракт собран на плате ЦОС. Дополнительно плата ЦОС предназначена для формирования имитационных сигналов спутников систем ГЛОНАСС и GPS. Имитационные сигналы по отдельному высокочастотному кабелю поступают в антенну и далее по основному приёмному тракту в БПВ.
Модуль навигационного процессора реализован на плате навигационного процессора и предназначен для:
а) обработки данных от РПУ с целью получения текущих координат места с учетом дифференциальных поправок к псевдодальностям для всех "видимых" НКА;
б) прогноза сеансов связи с НКА;
в) управления режимами работы РПУ, оценки стабильности частоты ОГ;
г) выполнения обмена информацией через последовательный интерфейс;
д) контроля работоспособности и диагностики ОС.

Рис.5.22. Внешний вид задней панели блока СИК.
Контроллер предназначен для организации обмена информацией между функциональными узлами БПВ, а также КС и ОС. Конструкция контроллера обеспечивает:
- установку и коммутацию "разъем в разъем" платы процессора датчика GNSS,
- установку и коммутацию "разъем в разъем" платы КВУ-386,
- разводку питания от ВИП ко всем узлам и блокам БПВ.
Функциональная схема информационных связей контроллера приведена на рис.5.23. В ней:
1. Порт СОМ1 КВУ-386, через разъем Х8 БПВ "УПРАВЛЕНИЕ", обеспечивает прием команд от КС и выдачу в КС состояния СИК. Двунаправленная связь с КС осуществляется по протоколу RSIM, (скорость обмена 9600 бит/с).

Рис.5.23. Функциональная схема контроллера СИК.
2. Порт СОМ1 датчика GNSS, через разъем Х6 БПВ "РЕГИСТРАЦИЯ" обеспечивает передачу данных в КС для архивирования и управления режимами работы датчика GNSS. Двунаправленная связь КС с датчиком GNSS осуществляется по протоколу BINR (RSIM), (скорость обмена 19200 бит/с).
3. Порт СОМ3 КВУ-386, через разъем Х7 БПВ "ОБРАТНАЯ СВЯЗЬ", обеспечивает выдачу информации в ОС. Передача осуществляется по протоколу RSIM, скорость обмена 9600 бит/с).
4. Порт СОМ4 КВУ-386, через разъем Х9 БПВ "RTCM КАНАЛ1", обеспечивает прием диффпоправок от MSK-демодулятора (прием осуществляется по протоколу RTСM скорость обмена 9600 бит/с), установку режимов работы MSK-демодулятора и прием информации о состоянии канала радиоприема (двунаправленная связь с MSK-демодулятором осуществляется по протоколу NMEA).
5. Обмен информацией с блоком передней панели осуществляется через плату управления контроллера.
Блок передней панели (БПП) предназначен для:
- вывода и отображения 80 алфавитноцифровых, точечноматричных символов (знакомест) информации на ЖКИ БПВ;
- формирования кодов клавиш при работе потребителя с клавиатурой;
- подачи звуковой сигнализации.
БПП состоит из узла звуковой сигнализации, платы передней панели и модуля ЖКИ. Структурная схема БПП приведена на рис.5.24.

Рис.5.24. Структурная схема блока передней панели СИК
На ППП размещены 10 цифровых и 13 функциональных клавиш, схема управления контрастностью индикатора модуля ЖКИ и схема управления подсветкой индикатора модуля ЖКИ.
MSK-демодулятор. MSK-демодулятор производит демодуляцию сигналов, принимаемых с РМк, и передачу их через контроллер в БПВ.
Технические характеристики MSK-демодулятора.
|
Диапазон частот |
283,5-325,0 |
|
Дискрет перестройки по частоте |
0,5 кГц |
|
Тип приемника |
Супергетеродинный приемник |
|
Промежуточная частота |
455 кГц |
|
Чувствительность на входе |
6 дБ/мкВ (при 10-3 ошибочных бит при скорости передачи 100 Бод) |
|
Модуляция |
MSK |
|
Скорость передачи данных |
25, 50, 100, 200 Бод (устанавливается автоматически или вручную) |
Интерфейс MSK-демодулятора.
|
Протокол данных |
RTCM SC104 |
|
Протокол опроса состояния |
NMEA 0183 |
|
Протокол управления |
NMEA 0183 |
|
Уровни сигналов |
RS-422 или RS-232С |
|
Скорость обмена |
300, 600, 1200, 2400, 9600, 14400, 19200 Бод (выбирается) |
Контроллер обеспечивает прием дифференциальных поправок от MSK-демодулятора в формате RTCM, а также управление режимами работы демодулятора и получение данных о состоянии канала радиопередачи в формате NMEA. Разделение предложений NMEA и сообщений RTCM производится по установленному восьмому биту всех символов NMEA предложения, включая <CR><LF>. RTCM-данные содержат старшие два бита (01 и 10). Состав предложений NMEA приведен в таблице 5.10.
Таблица 5.10. Предложения NMEA для управления MSK-приемником
|
Предложение NMEA |
Назначение |
|
$GPMSK |
Установка интервала посылки информации о соотношении сигнал/шум и уровне сигнала с MSK-приемника, установка скорости и частоты передачи данных радиомаяком. Контроллер СИК посылает на MSK-приемник |
|
$BRMSS |
Информация о силе сигнала радиомаяка и соотношении сигнал/шум. Передается MSK-приемником контроллеру СИК |
|
$BRMSK |
Информация о настройке MSK-приемника. Передается приемником контроллеру СИК по запросу |
|
$GPBRQ,MSK |
Контроллер СИК запрашивает у MSK-приемника информацию о настройке |
|
$GPBRQ,MSS |
Контроллер СИК запрашивает у MSK-приемника информацию о параметрах принимаемого сигнала |
Блок питания. БП предназначен для преобразования входного напряжения в напряжение, необходимое для питания всех узлов СИК. Блок питания состоит из двух блоков:
- сетевого адаптера ПКАН.436617.012;
- платы ВИП ПКАН.4366634.018.
При отказе сети переменного тока СА осуществляет автоматическое переключение на резервный источник постоянного тока. Функциональная схема БП приведена на рисунке 5.25.
Рис.5.25.
Функциональная схема БП СИК.
БП сохраняет работоспособность при напряжении на входе:
- переменного тока от 99 до 242 В;
- постоянного тока от 21 до 33 В.
При этом он обеспечивает параметры выходных напряжений в соответствии с таблицей 5.11.
Таблица 5.11. Параметры БП
|
Выходное напряжение, В |
Выходной ток, А |
Пределы изменения выходного напряжения, В. |
Уровень пульсаций, мВ |
|
+15 |
0.2 |
+3/-2 |
300 |
|
+12 |
0.65 |
+/-0.6 |
15 |
|
+5 |
4.0 |
+/-0.2 |
40 |
Узел коммутации. Узел коммутации состоит из разъемов, тумблеров, предохранителей и клемм заземления, через которые на БПВ поступает электропитание, а также интерфейсных и высокочастотных разъемов, через которые БПВ связан с ОС, КС и антенной. Переключатель “СЕТЬ 220 В“ предназначен для подачи переменного напряжения. Положение “1” – питание включено, положение “0” – питание выключено. Переключатель “27 В“ предназначен для подачи постоянного напряжения.
Предохранители FU1, FU2 – (вставка плавкая ВП2Б-1В) защищают БПВ от перегрузки в сети переменного напряжения. Предохранитель FU3 (вставка плавкая ВП2Б-1В) защищает БПВ от перегрузки в сети напряжения постоянного тока. Разъем “Х1“ предназначен для подключения к электропитанию 220 В. Разъем “Х2” предназначен для подключения к электропитанию +27 В. Нумерация контактов и названия цепей в разъемах Х1, Х2 приведены в таблице 5.12.
Таблица 5.12. Нумерация контактов и названия цепей разъемов БПВ в СИК
|
Разъем ”Х1” Вилка РН3-ВМ |
Разъем ”Х2” Вилка 2РМГ14Б4Ш1Е2 | ||
|
Контакт |
Цепь |
Контакт |
Цепь |
|
1 |
220 В |
1 |
КОРПУС |
|
2 |
220 В |
2 |
GND |
|
3 |
КОРПУС |
3 |
27 В |
Разъем “Х3” (розетка TNC R143324) – "АНТЕННА ИМИТ." предназначен для подключения ВЧ-кабеля антенны имитатора (вход ”И” антенны).
Разъем “Х4” (розетка–TNC R143324) – "АНТЕННА GNSS" предназначен для подключения ВЧ-кабеля антенны GNSS (вход ”А” антенны). Разъем “Х5” (розетка–TNC R143008) – "АНТЕННА MSK" предназначен для подключения кабеля антенны MSK-демодулятора. Через разъем “Х7”– "ОБРАТНАЯ СВЯЗЬ", БПВ выдает информацию на ОС. Через разъемы “Х6”, “Х8”– "РЕГИСТРАЦИЯ", "УПРАВЛЕНИЕ", происходит обмен информацией БПВ с КС. Через разъемы “Х9”, “Х10” – "RTCM КАНАЛ1", "RTCM КАНАЛ2" происходит двунаправленный обмен информацией контроллера БПВ с MSK-демодулятором. Нумерация контактов и названия цепей разъемов ”Х6”,”Х7”, ”Х8”, ”Х9”, ”Х10” указаны в таблице 5.13.
Таблица 5.13. Нумерация контактов и названия цепей разъемов БПВ в СИК.
|
Разъем ”Х6” Розетка DB-9F |
Разъем ”Х7” Розетка DB-9F |
Разъем ”Х8” Розетка DB-9F |
Разъем ”Х9” Розетка DB-9F |
Разъем "Х10" РозеткаDB-9F | |||||||
|
Кон- такт |
Цепь |
Кон- такт |
Цепь |
Кон- такт |
Цепь |
Кон- такт |
Цепь |
Кон- такт |
Цепь | ||
|
1 |
- |
|
|
1 |
- |
1 |
- |
1 |
- | ||
|
2 |
RX0B |
2 |
RX0 |
2 |
RXD3 |
2 |
RXD4 |
2 |
RX5 | ||
|
3 |
TXOB |
3 |
TX0 |
3 |
TXD3 |
3 |
TXD4 |
3 |
TX5 | ||
|
4 |
DTROB |
|
|
4 |
DTR3 |
4 |
DTR4 |
4 |
DTR5 | ||
|
5 |
GND |
5 |
GND |
5 |
GND |
5 |
GND |
5 |
GND | ||
|
6 |
DSROB |
|
|
6 |
DSR3 |
6 |
DSR4 |
6 |
DSR5 | ||
|
7 |
RTSOB |
|
|
7 |
RTS3 |
7 |
RTS4 |
7 |
RTS5 | ||
|
8 |
CTSOB |
|
|
8 |
CTS3 |
8 |
CTS4 |
8 |
CTS5 | ||
|
9 |
RIOB |
|
|
9 |
RI3 |
9 |
RI4 |
9 |
- | ||
Антенна GNSS в СИК
Антенна предназначена для приёма сигналов НКА ГЛОНАСС и GPS в частотном диапазоне от 1570 МГц до 1610 МГц, их усиления, фильтрации и передачи сигналов в БПВ, по высокочастотному кабелю ПКАН.468543.100.
Для калибровки радиоприемного устройства в диапазоне рабочих частот приема предусмотрен имитационный сигнал. Имитационный сигнал поступает на входной разъем Х2”И” антенны от БПВ по высокочастотному кабелю ПКАН.468543.100-01.
Антенна представляет собой законченную конструкцию, состоящую из излучателя антенного, распределительно-фазового устройства, аттенюатора имитационного сигнала, малошумящего усилителя. Внешний вид антенны приведен на рисунке 5.27.
Излучатель антенный – спиральный вибратор, имеющий круговую диаграмму направленности в верхней полусфере.
Для подавления эффекта многолучевости внизу антенны установлен ригель, предназначенный для подавления отраженных сигналов НКА с направлений ниже горизонтальной плоскости. Для защиты от воздействия атмосферных осадков антенна закрыта конусообразным радиопрозрачным колпаком.
Технические характеристики антенны приведены в таблице 5.13.
Таблица 5.13. Технические характеристики антенны
|
Параметр |
Значение |
|
Диапазон рабочих частот, МГц |
1570-1610 |
|
КСВН выхода, не более |
2 |
|
Выходное сопротивление, Ом |
50 |
|
Коэффициент усиления антенны, дБ |
(30,52,5) |
|
Коэффициент шума, дБ не более |
3,5 |
|
Напряжение питания, В |
( 11,50,6) |
|
Ток потребления, мА не более |
36 |
|
Масса, г, не более |
3900 |
|
Диапазон рабочих температур, С |
От –40 до +65 |
|
Предельные температуры: С - пониженная - повышенная |
- 40 + 75 |
|
Влажность, % при температуре, С |
100 25 |
|
Вибрация: - диапазон частот, Гц - виброускорение, г |
1 – 80 5 |
|
Положение фазового центра |
По центральной оси антенны на расстоянии 75 мм от нижнего среза корпуса |
Антенна MSK-демодулятора. Антенна MSK-демодулятора предназначена для приема радиосигналов РМк. Эскиз этой антенны и её габариты (в мм) представлены на рис.5.23. Она представляет собой неразъёмный герметичный блок активной СВЧ-вибраторной антенны с широкой диаграммой направленности в сторону "верхней" полусферы над заострённой её вершиной.
Кабель к ней типа ВЧ ПКАН.468543.100 (см. рис.5.26.) предназначен для передачи сигналов НКА от блока GNSS на БПВ.
ВилкаTNC R143018
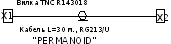
Рис.5.26.
Рис.5.27. Внешний вид антенны СИК.
Второй кабель типа ВЧ ПКАН.468543.100-01 предназначен для передачи в антенну GNSS имитационного сигнала калибровки радиоприемного устройства БПВ. Параметры кабеля ВЧ ПКАН.468543.100-01 идентичны параметрам кабеля ВЧ ПКАН.468543.100. Кабель ПКАН.685623.096 (см. рис.5.28.) предназначен для связи MSK-демодулятора с контроллером.

Рис.5.28.
Шнур сетевой (см. рис.5.29.) предназначен для подключения к сети 220В 50Гц.

Рис.5.29.
Станция удаленного контроля (СУК) в Темрюке. Назначение и состав. Станция удаленного контроля дифференциальной подсистемы ГЛОНАСС/GPS предназначена для контроля за работой дифференциальной подсистемы ГЛОНАСС/GPS в удаленных точках рабочей зоны ее действия.
Антенна приемника ГЛОНАСС/GPS (СН 3101), устанавливаемая в точке с известными (эталонными) координатами, осуществляет прием сигналов всех видимых космических аппаратов (КА) космических навигационных систем (КНС) ГЛОНАСС (Россия) и GPS (США). Вычисление координат места производится с учетом принимаемых дифференциальных поправок. Прием дифференциальных поправок осуществляется с помощью приемника диффпоправок (GR 80), настроенного на частоту соответствующего передатчика диффпоправок. Информация о работе приемника ГЛОНАСС/GPS поступает в персональный компьютер, где производится ее обработка: сравнение вычисляемых координат места с эталонными, наличие дифференциальных поправок, вычисление процента принятых ошибочных сообщений и т.д. На основании проведенного анализа принимается автоматическое решение о соответствии параметров дифференциальной подсистемы ГЛОНАСС/GPS заданным значениям.
В состав станции удаленного контроля дифференциальной подсистемы ГЛОНАСС/GPS входит следующее оборудование: приемник ГЛОНАСС/GPS “СН 3101” (блок антенный с высокочастотным кабелем, блок приемо-вычислителя, сетевой адаптер со шнурами питания, комплект интерфейсных кабелей, комплект ЭД); приемник диффпоправок “GR-80” (блок антенный с высокочастотным кабелем, блок приемника, сетевой адаптер со шнурами питания, комплект интерфейсных кабелей, руководство оператора); персональный компьютер (системный блок, монитор, клавиатура, мышь, кабели питания); техническое описание, правила установки, использования и технического обслуживания приемника ГЛОНАСС/GPS “СН 3101” и приемника диффпоправок “GR 80” приведены в соответствующих комплектах эксплуатационных документов.
Краткое описание программы “Satellite Monitor”. Программа “Satellite Monitor” (далее программа) предназначена для работы в составе станции удаленного контроля дифференциальной подсистемы ГЛОНАСС/GPS (далее станция). Программа обеспечивает прием и обработку данных от оборудования станции, а также автоматический и визуальный контроль параметров работы дифференциальной подсистемы ГЛОНАСС/GPS.
В программе используются данные, вводимые по протоколу NMEA 0183, которые поступают из приемника ГЛОНАСС/GPS “СН 3101” в следующем виде:
- GGA (время, широта, долгота, показатель качества обсервации, число используемых КА, горизонтальный геометрический фактор, высота антенны над уровнем моря, высота геоида, время устаревания диффпоправок, идентификатор опорной станции);
- GSV (общее число используемых КА, высота, азимут и отношение сигнал/шум для каждого номера КА);
- GSA (ручное/автоматическое управление, режим определения координат, номера КА используемых в решении навигационной задачи, общий, горизонтальный и вертикальный геометрические факторы);
- ZDA (текущее время, день, месяц, год, поправка поясного времени).
Из приемника диффпоправок “GR 80” поступают предложения:
- MSS (уровень сигнала, отношение сигнал/шум);
- MSK (частота сигнала, скорость передачи) – одновременно используется для установки.
Кроме этого, в программу вводятся значения следующих величин:
- эталонные координаты места (широта, долгота, высота);
- параметры мишени (размер по широте и долготе, признак автоматического увеличения размера, масштаб линейной сетки, признаки вывода на экран среднеквадратической погрешности, средних координат места и т.д.);
- признаки и пороги тревог (номер опорной станции, количество КА в зоне радиовидимости, количество используемых КА, погрешность определения двух координат, погрешность определения трех координат, процент принятых ошибочных RTCM сообщений, уровень MSK сигнала, отношение MSK сигнал/шум, возраст диффпоправок, возраст MSS предложения, режим определения координат – дифференциальный/стандартный/нет определения);
- параметры приемника диффпоправок (частота MSK сигнала, скорость передачи, интервал передачи MSS предложения, пороговое время ожидания MSS предложения).
На основе принимаемой информации программа производит сравнение с установленными значениями порогов, анализирует результаты сравнения и принимает решение о нормальной работе, кратковременных сбоях или отказе дифференциальной подсистемы ГЛОНАСС/GPS, что сопровождается звуковой и цветовой сигнализацией.
Одновременно с текущей обработкой информации программа осуществляет запись и хранение всей поступающей информации, установленных пороговых значений и результатов анализа. Информация записывается на “жесткий” диск и хранится в течение не менее 30 суток, в дальнейшем она заменяется более свежей. При необходимости программа позволяет производить повторную визуализацию ранее записанной информации.
------------------------------