

-
Скоростная девиация гирокомпасов и способы ее устранения.
Ввиду
закономерности
 ,
естественно, возникает следующий вопрос:
не могут ли в процессе использования
гирокомпаса сложиться такие условия,
при которых в плоскости горизонта, кроме
упомянутой горизонтальной составляющей
,
естественно, возникает следующий вопрос:
не могут ли в процессе использования
гирокомпаса сложиться такие условия,
при которых в плоскости горизонта, кроме
упомянутой горизонтальной составляющей
 появятся какие-то дополнительные векторы
угловой скорости, в результате чего
произойдет смещение положения равновесия
главной оси чувствительного элемента
в сторону от плоскости истинного
меридиана? Нетрудно прийти к заключению,
что источником таких дополнительных
угловых скоростей может быть движение
основания гирокомпаса по сферической
поверхности Земли. По этой причине
необходимо выявить совокупность угловых
скоростей, которые будут восприниматься
чувствительным элементом гирокомпаса,
установленного на судне, движущемся с
постоянной скоростью и на постоянном
курсе.
появятся какие-то дополнительные векторы
угловой скорости, в результате чего
произойдет смещение положения равновесия
главной оси чувствительного элемента
в сторону от плоскости истинного
меридиана? Нетрудно прийти к заключению,
что источником таких дополнительных
угловых скоростей может быть движение
основания гирокомпаса по сферической
поверхности Земли. По этой причине
необходимо выявить совокупность угловых
скоростей, которые будут восприниматься
чувствительным элементом гирокомпаса,
установленного на судне, движущемся с
постоянной скоростью и на постоянном
курсе.
Движение судна считается однозначно заданным, если известны его скорость V и истинный курс ИК (рис.2.20). Другим вариантом определения движения является задание составляющих скоростей: VN — вдоль меридиана и VE— вдоль параллели (см. рис.2.20).

Связь между двумя вариантами устанавливается следующими соотношениями:
VN = К cos ИК; VE = V sin ИК. (2.43)
Поскольку движение судна происходит по земной сфере, существование линейных скоростей неизбежно вызовет появление некоторых угловых движений. Для определения существующих угловых скоростей обратимся к рис.2.21, на котором положение судна на земной сфере задано координатами 𝝋 и 𝝀, а его движение — составляющими VN и VE скорости. Отчетливо видно, что движение с линейной скоростью VN по дуге большого круга, имеющего радиус, равный R0, приводит к возникновению угловой скорости, вектор которой равен отношению VN/R0 и направлен по линии EW к W.
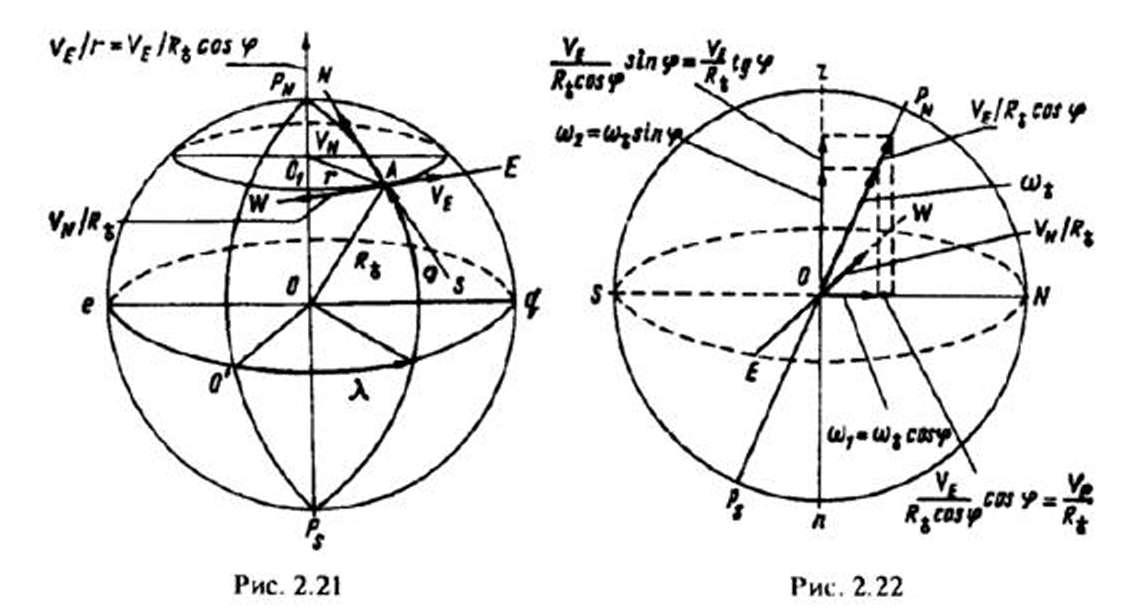
Соответственно движение с линейной скоростью VE, происходящее по дуге параллели радиусом r = R0cos𝝋 приводит к появлению угловой скорости, вектор которой равен отношению VE/R0cos𝝋.
Пользуясь тем свойством, что вектор угловой скорости является свободным вектором, т.е. его можно переносить параллельно самому себе в любую точку, нанесем этот вектор на ось вращения Земли, т.е. на ось PNPS по направлению к PN.
Теперь
установлена совокупность угловых
скоростей (поле угловых скоростей),
которые воспринимаются чувствительным
элементом гирокомпаса, установленного
на движущемся судне. Указанное поле
угловых скоростей включает в себя
составляющие и
 угловой
скорости
суточного вращения Земли (переносные
угловые скорости) и составляющие VN/R0
и VE/R0cos𝝋
угловой скорости вращения судна
относительно
Земли. Все перечисленные составляющие
показаны на рис.2.22, там же отчетливо
видно, каким образом они разложены по
осям горизонтной системы координат
ONЕn.
угловой
скорости
суточного вращения Земли (переносные
угловые скорости) и составляющие VN/R0
и VE/R0cos𝝋
угловой скорости вращения судна
относительно
Земли. Все перечисленные составляющие
показаны на рис.2.22, там же отчетливо
видно, каким образом они разложены по
осям горизонтной системы координат
ONЕn.
В итоге поле угловых скоростей однозначно характеризуется следующими тремя составляющими: а) по оси N-S по направлению к N; б) по оси E-W по направлению к E;
в) по оси Z-n по направлению к n, т.е. соответственно:

С
позиций, изложенных в начале данного
параграфа, главный интерес представляет
тот факт, что в плоскости истинного
горизонта оказались вместо единственной
составляющей ( ,
как это имело место в случае неподвижного
основания,
три составляющие, в том числе
VN/R0
—
ортогональная к
,
как это имело место в случае неподвижного
основания,
три составляющие, в том числе
VN/R0
—
ортогональная к
 .
.
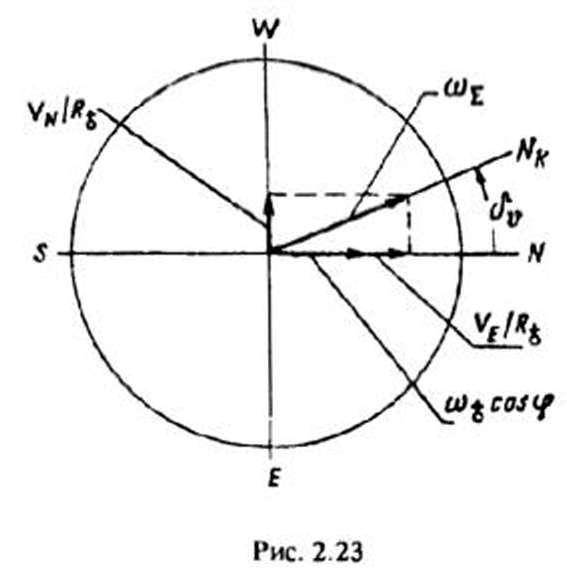
На
рис.2.23 показана плоскость истинного
горизонта (вид с зенита)
и расположенные в этой плоскости
составляющие
 и
и
 ,
данные в развернутом виде. Равнодействующая
всех составляющих угловых скоростей,
лежащих в плоскости горизонта,
определяется:
,
данные в развернутом виде. Равнодействующая
всех составляющих угловых скоростей,
лежащих в плоскости горизонта,
определяется:

И по направлению – углом δV, тангенс которого находят по формуле:

(знак «минус» означает, что при заданных исходных условиях угол δV имеет западное наименование). Поскольку положение равновесия главной оси ОХ чувствительного элемента гирокомпаса теперь располагается в вертикальной плоскости, содержащей вектор равнодействующей указанная плоскость получает название плоскость компасного меридиана, а ее угловое отклонение от плоскости истинного меридиана получает название скоростная девиация гирокомпаса.
Формула (2.46), совершенно точная с математической точки зрения, противоречива с практической точки зрения, поскольку для определения погрешности курса — угла δV необходимо знать истинное значение последнего. Для устранения этого недостатка преобразуем формулу (2.46) с помощью известного общего соотношения
ИК = КК+ δV. (2.47)
Используя уравнение (2.47), представим выражение (2.46) в виде:

что тождественно равно следующему выражению:
 или
или
 ,
откуда
,
откуда

Основные закономерности скоростной девиации, вытекающие из анализа формулы (2.48), состоят в следующем:
-
Возникновение скоростной девиации обусловливается наличием у судна северной составляющей скорости движения.
-
Девиация линейно зависит от скорости судна.
-
Девиация имеет пол у круговой характер зависимости от компасного курса (максимальные по абсолютному значению девиации достигаются на курсах 0° и 180°, нулевые — на курсах 90° и 270°).
-
Зависимость девиации от широты определяется функцией l/cos𝝋 = sec𝝋, поэтому особенно резкое увеличение его численного значения происходит в широтах выше 70°.
При скоростях, нс превышающих 25 уз, и широтах плавания не выше 80° скоростная девиация имеет значение, не превышающее 10°. В указанных условиях допустимо вместо формулы (2.48) использовать более удобную формулу

Ошибка
от замены sin
 самим углом
самим углом
 в
оговоренных численных пределах составляет
примерно 1% что допустимо.
в
оговоренных численных пределах составляет
примерно 1% что допустимо.
Остановимся на некоторых вопросах, связанных с особенностями использования корректора скоростной девиации в специфических условиях плавания.
Введем понятия фактических широт 𝝋ф и скорости Vф плавания судна и соответственно аналогичные установочные параметры 𝝋у и Vy.
В соответствии с формулой (2.48) запишем два выражения для скоростной девиации:

Потребуем,
чтобы
 =
=
 .
Для выполнения этого условия необходимо
обеспечить следующее равенство:
.
Для выполнения этого условия необходимо
обеспечить следующее равенство:


2. При плавании в условиях действия течения скоростная девиация гирокомпаса вследствие очевидной зависимости от действительной скорости и направления движения по отношению к Земле должна определяться по формуле:

где Va — абсолютная скорость судна (по отношению к грунту);
ПУ —путевой угол (угол, составленный линией пути судна с плоскостью истинного меридиана).
Имея на борту абсолютный лаг или зная абсолютную скорость судна на основании надежных обсерваций, можно было бы ввести в корректор соответствующее значение скорости. Однако ввести ПУ в корректор существующей конструкции не представляется возможным. По этой причине, используя принцип суперпозиции (независимости действий), рекомендуется ввести раздельное исключение составных частей скоростной девиации. Первая часть девиации — от движения судна по отношению к воде — исключается с помощью корректора в соответствии с формулой, по которой он вычисляет девиацию:

где
 — скорость судна по относительному
лагу.
— скорость судна по относительному
лагу.
Вторая часть девиации — от движения судна под действием течения — учитывается аналитически путем введения дополнительной (к уже, возможно, имеющейся) поправки гирокомпаса ΔГК = δV", причем δV" рассчитывается по формуле

где VT — скорость течения; КT — истинный курс течения.
Параметры течения VT и КT определяют методами, известными из
навигации, при наличии надежных обсерваций достаточной точности. Девиация δV"при сильных течениях, близких по направлению к меридиану, может достигать значения до 1°.
Вести учет δV" следует только при плавании в океане, когда имеются соответствующая информация и экономическая целесообразность.
При плавании же на приливо-отливных течениях даже большой силы подобный учет вести не рекомендуется, так как штурманский состав главное внимание должен уделять навигационному учету течения и тщательному контролю места судна всеми доступными способами.