

Билет 14
Вопрос 1
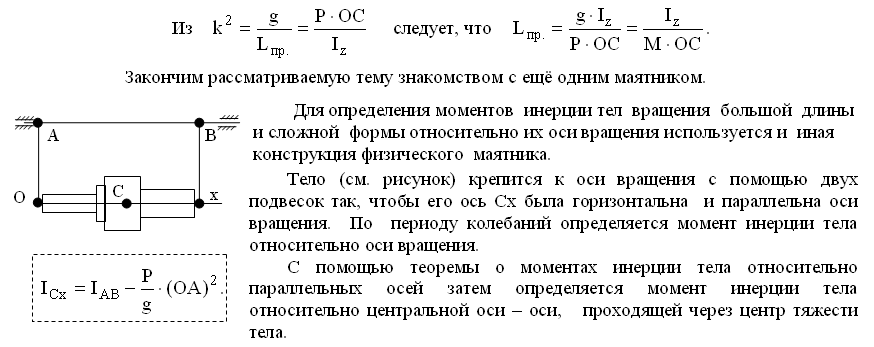
Под физическим маятником можно понимать любое тело, совершающее малые колебания относительно неподвижной горизонтальной оси под действием силы тяжести.

Как опытным путем определить положение центра тяжести тела сложной формы относительно оси (расстояние ОС ), рассматривалось в разделе “Статика”. По измеренному периоду колебаний этого тела можно определить его момент инерции относительно оси Oz, проходящей через точку О,
и относительно горизонтальной оси, проходящей через центр масс тела.
Интересно знать ещё и следующее. У колеблющихся физических тел на продолжении линии, проходящей через ось вращения и центр тяжести тела, существует точка, которую называют центром качаний.
Если тело заставить колебаться относительно оси, проходящей через центр качаний, то период колебаний этого тела будет точно таким же, как и при колебаниях относительно оси, проходящей через точку О.
Находится центр качаний (т. D на рисунке) на продолжении линии ОС ниже центра тяжести тела на расстоянии, которое принято называть приведенной длиной физического маятника.
Дадим этому понятию следующее определение.
Под приведенной длиной физического маятника понимается длина математического
маятника, период колебаний которого равен периоду колебаний физического маятника.
Приведенную длину маятника легко определить, приравняв выражения, из которых
определяются циклическая частота колебаний в каждом из случаев.
Вопрос 2
Кинетический момент точки и системы относительно центра и оси
Рассмотрим систему материальных точек с массами m1m2....mn, имеющих в данный момент скорости v1v2.....vn относительно инерциальной системы отсчета. Выберем произвольный центр О (Рис.1). Кинетическим моментом точки mj относительно центра О называется вектор момента ее количества движения относительно этого центра.
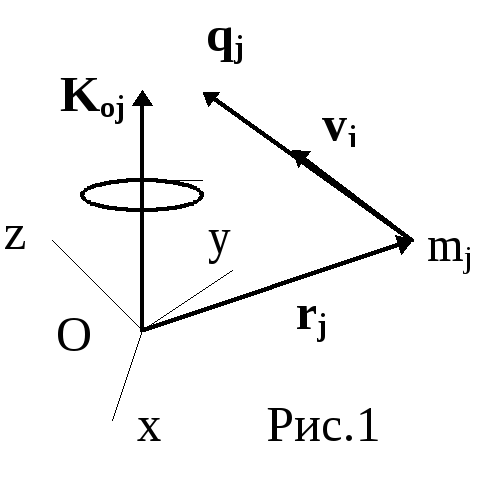
Koj=mo(qj)=rjmjvj (j=1,2...n) (1)
Известно, что векторное умножение можно записать через присоединенную матрицу первого сомножителя радиуса вектора r.
Опуская индекс j, запишем матричное выражение в осях xyz c началом в О:
Ko=mRv (2)
где R- кососимметричная присоединенная матрица столбца r
![]() =m
=m
![]() =m
=m (3)
(3)
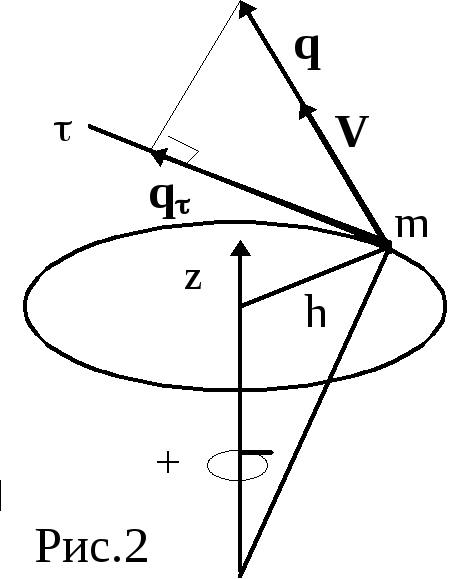
Проекция кинетического момента на ось называются кинетическим моментом точки относительно оси. Он вычисляется либо аналитически по формулам (3), либо как момент силы относительно оси. Момент дает только касательная составляющая вектора q (Рис.2).
KZ= +qth (4)
Момент обращается в ноль, если вектор количества движения (скорость точки) лежит в одной плоскости с осью (параллелен или пересекает ось)
Кинетическим моментом системы относительно центра О называется главный момент количеств движений точек системы относительно этого центра.
Ko=Koj=mjrjvj (5)
Аналогично с формулой (3) проекции вектора (4) образуют столбец кинетических моментов относительно осей координат
![]() =mj
=mj (6)
(6)
Кинетическим
моментом механической системы относительно
полюса (оси) называют векторную
(алгебраическую) сумму моментов количеств
движения всех точек системы относительно
этого же полюса О (той
же оси)
![]() (
( ![]() )
. (3.22)
Кинетический момент механической
системы часто называют главным моментом
количества движения системы соответственно
относительно полюса или оси.
Если
спроектировать кинетический момент
)
. (3.22)
Кинетический момент механической
системы часто называют главным моментом
количества движения системы соответственно
относительно полюса или оси.
Если
спроектировать кинетический момент ![]() из
(3.22) на прямоугольные декартовы оси
координат, то получим проекции
кинетического момента на эти оси или
кинетические моменты относительно осей
координат
Если система
материальных точек движется поступательно,
то
из
(3.22) на прямоугольные декартовы оси
координат, то получим проекции
кинетического момента на эти оси или
кинетические моменты относительно осей
координат
Если система
материальных точек движется поступательно,
то ![]() и,
следовательно,
и,
следовательно, ![]() .
Мы
воспользовались свойством сочетательности
векторного произведения относительно
скалярного множителя и формулой для
определения радиуса - вектора центра
масс (2.4).
Таким образом, кинетический
момент системы относительно полюса при
поступательном движении равен моменту
количества движения системы относительно
этого полюса, при условии, что количество
движения системы приложено в центре
масс.
^ Кинетический
момент твердого тела относительно оси
вращения
.
Мы
воспользовались свойством сочетательности
векторного произведения относительно
скалярного множителя и формулой для
определения радиуса - вектора центра
масс (2.4).
Таким образом, кинетический
момент системы относительно полюса при
поступательном движении равен моменту
количества движения системы относительно
этого полюса, при условии, что количество
движения системы приложено в центре
масс.
^ Кинетический
момент твердого тела относительно оси
вращения
 Рис.
18
Пусть твердое тело вращается
вокруг неподвижной оси
Рис.
18
Пусть твердое тело вращается
вокруг неподвижной оси ![]() с
угловой скоростью
с
угловой скоростью ![]() (рис.
18). Выберем произвольную точку
(рис.
18). Выберем произвольную точку ![]() в
твердом теле и вычислим кинетический
момент этого тела относительно оси
вращения. По определению кинетического
момента системы относительно оси
имеем
в
твердом теле и вычислим кинетический
момент этого тела относительно оси
вращения. По определению кинетического
момента системы относительно оси
имеем
![]() .
Но
при вращении тела вокруг оси
.
Но
при вращении тела вокруг оси ![]() ,
,
причём количество
движения точки ![]() -
- ![]() перпендикулярно
отрезку
перпендикулярно
отрезку ![]() и
находится в плоскости, перпендикулярной
оси вращения
и
находится в плоскости, перпендикулярной
оси вращения ![]() .
Следовательно, момент количества
движения относительно оси
.
Следовательно, момент количества
движения относительно оси ![]() для
точки
для
точки ![]()
![]() .
Для
всего тела
.
Для
всего тела ![]() ,
то
есть
,
то
есть ![]() .
(3.24)
Кинетический момент вращающегося
тела относительно оси вращения равен
произведению угловой скорости тела на
его момент инерции относительно оси
вращения.
.
(3.24)
Кинетический момент вращающегося
тела относительно оси вращения равен
произведению угловой скорости тела на
его момент инерции относительно оси
вращения.
Билет 15