

Вопрос 2
Если голономная
механическая
система описывается лагранжианом ![]() (
(![]() — обобщённые
координаты, t — время,
точкой обозначено дифференцирование по
времени) и в системе действуют
только потенциальные
силы,
то уравнения Лагранжа второго рода
имеют вид
— обобщённые
координаты, t — время,
точкой обозначено дифференцирование по
времени) и в системе действуют
только потенциальные
силы,
то уравнения Лагранжа второго рода
имеют вид

где i = 1, 2, … n (n — число степеней свободы механической системы). Лагранжиан представляет собой разность кинетической и потенциальной энергий системы.
Если в системе действуют непотенциальные силы (например, силы трения), уравнения Лагранжа второго рода имеют вид

где ![]() — кинетическая
энергия системы,
— кинетическая
энергия системы, ![]() — обобщённая
сила.
— обобщённая
сила.
По сравнению с ур-ниями в декартовых координатах (см., напр., ур-ния Лагранжа 1-го рода) ур-ния (3) обладают тем важным преимуществом, что число их равно числу степеней свободы системы и не зависит от кол-ва входящих в систему материальных частиц или тел; кроме того, при идеальных связях из ур-ний (3) автоматически исключаются все наперёд неизвестные реакции связей. Л. у. 2-го рода, дающими весьма общий и притом достаточно простой метод решения задач, широко пользуются для изучения движения разл. механич. систем, в частности в динамике механизмов и машин, в теории гироскопа ,в теории колебаний и др.
Билет 22
Вопрос 1
Приближенная теория гироскопа.


Основные понятия и допущения.

Теорема Резаля (особенности движения осей гировскопа):
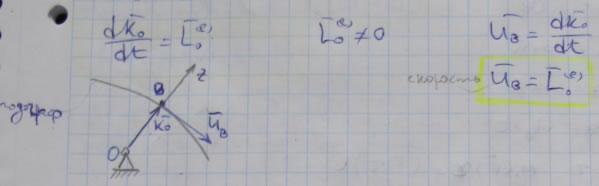
Правило прецессии: Если к вращающемуся вокруг собственной оси гироскопу приложить внешнии силы создающие момент, относительно неподвижной точки, то та часть оси гироскопа по которой направлен кинетический момент Ko, начнет прецессировать в направлении векторного момента внешних сил Loe.
Вопрос 2
Дифференциальные уравнения поступательного движения твердого тела.

Поступательное движение можно рассматривать, как движение точки.
(Возможно нужно еще добавить:
dQ/dt=Re
Q= Σmkvk = M*vc >>> dQ/dt=M*ac
ma=F
Q, v, a, F - вектора)