

3.2. Совершенствование конструкции и расчет шнекового конвейера
Перейдем от системы управления шнековым транспортером к его проектированию.
Для реализации задачи разработки и усовершенствования конструкции представляем шнековый конвейер с частотно-токовым регулированием скорости привода (рис.19).
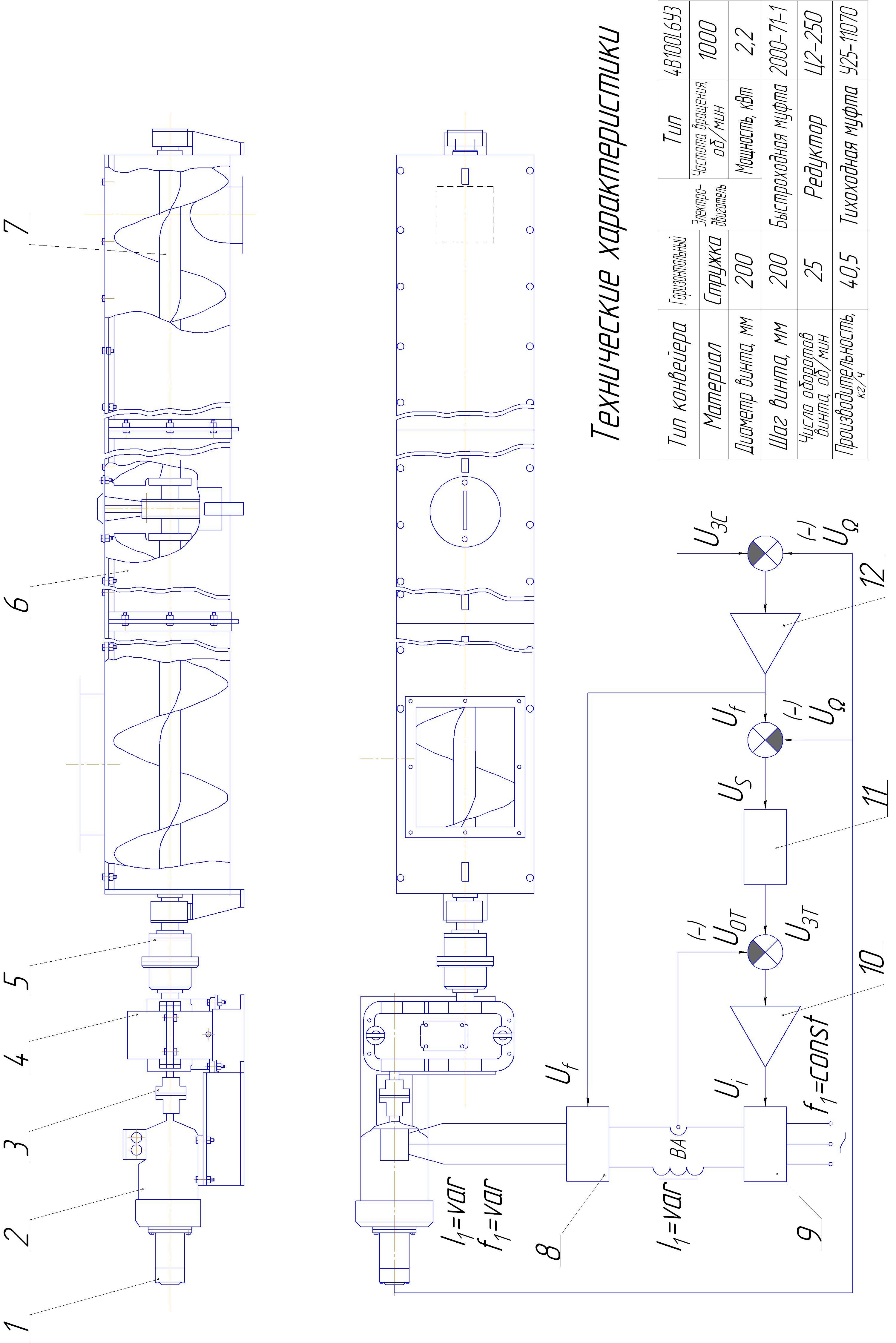
Рис. 19. Шнековый транспортер.
Как и в приводе постоянного тока, в асинхронном регулируемом электроприводе образована двухконтурная система управления с внутренним контуром тока и внешним контуром скорости. Каждый контур имеет свой регулятор. Сигнал задания в контуре скорости UЗС сравнивается с сигналом обратной связи по скорости U, пропорциональным реальной скорости асинхронного электродвигателя. На основании разницы UЗС - U регулятор скорости 12 формирует сигнал Uf управления автономным инвертором тока 8, задающий частоту тока статора f1 и, следовательно, скорость магнитного поля 0. Таким образом, происходит регулирование по первому каналу электропривода – частотному.
В контуре тока выходной сигнал регулятора скорости 12 Uf, пропорциональной частоте тока статора складывается с сигналом отрицательной обратной связи по скорости U, формируя сигналы пропорциональный абсолютному скольжению s электродвигателя:
![]() ,
,
где ![]() - коэффициенты преобразования.
- коэффициенты преобразования.
Функциональный преобразователь 11 на основе сигнала о скольжении электродвигателя формирует сигнал задания тока статора UЗТ, который поступает на регулятор тока 10 и сравнивается с сигналом обратной связи по току UОТ, пропорциональным реальному току статора. Выходной сигнал 10 поступает на управляемый выпрямитель 9 и формирует закон изменения тока статора. Таким образом, происходит регулирование по второму каналу электропривода – токовому.
Далее проведем расчет уже спроектированного шнекового конвейера, для определения основных производственных характеристик.
Выберем исходные параметры:
диаметр винта: D=0,2м;
длина конвейера: L=3,7м;
Рассчитаем минимальный и максимальный объем металлической стружки по формуле:
![]() ;
;
![]()
где s – подача при точении;
t – глубина резания;
v – скорость резания.
Параметры s, t, v приняли из главы 2.
Расчет основных параметров винтового конвейера.
Определим максимальную и минимальную производительность винтового конвейера, которая рассчитывается по формуле:
![]() (1)
(1)
где D – диаметр винта, м;
t – шаг винта, м; п – частота вращения винта, об/мин; ρ – плотность транспортируемого материала, т/м3; С – поправочный коэффициент, зависящий от угла наклона конвейера β, при β= 0º принимаем С = 1 [1, стр. 354] ψ – коэффициент наполнения поперечного сечения винта, для абразивных материалов ψ = 0,125 [1, стр. 354].
В нормальных условиях работы рекомендуется шаг винта t принимать равным диаметру винта D [1, стр. 354]. Плотность стружки выбираем таблицы 5 [3, стр. 21] ρ = 1,5 т/м3. Рекомендуемое число оборотов винта выбираем по ГОСТ 2037-65 п = 25 об/мин.
![]()
![]()
Определим максимальную и минимальную мощность на валу винта.
Мощность на валу винта определяют по формуле [1, стр. 355]:
![]() (2)
(2)
где L – горизонтальная проекция длины конвейера, м; W – опытный коэффициент сопротивления при движении груза по желобу [1, стр. 354, табл. 12.1], W = 4; k – коэффициент, учитывающий характер перемещения винта, k = 0,2; qК – погонная масса вращающихся частей конвейера, кг/м; v – осевая скорость движения груза, м/с; В – коэффициент сопротивления движению вращающихся частей конвейера, при подшипниках качения В = 0,08.
Максимальную частоту вращения винта можно определить по формуле:
![]() (3)
(3)
где А– расчетный коэффициент, для абразивного материала, А = 30 [1,стр.354]
![]()
Далее определим осевую скорость движения груза:
 (4)
(4)
Затем найдем погонную массу вращающихся частей конвейера:
![]() (5)
(5)
![]()
Зная все необходимые значения, находим мощность на валу винта:
![]()
![]()
Определение мощности и выбор электродвигателя.
Минимальную и максимальную мощность двигателя определяется с учетом КПД механизма:
![]() (6)
(6)
![]() -
механический КПД привода, [4, стр. 19];
-
механический КПД привода, [4, стр. 19];
где
![]() (7)
(7)
где ![]() –
кпд муфт,
–
кпд муфт, ![]() =0,98;
=0,98;
![]() – кпд
двухступенчатого редуктора,
– кпд
двухступенчатого редуктора, ![]() =
0,96.
=
0,96.
![]()
Теперь найдем мощности электродвигателя:
По ГОСТ 19523-81 выбираем асинхронный электродвигатель типа: 4А160М8У3 с номинальной мощностью 11 кВт и асинхронной частотой вращения nдв.ном.= 750 мин-1.
![]() Рис.20.
Кинематическая схема привода винтового
конвейера.
Рис.20.
Кинематическая схема привода винтового
конвейера.
Кинематический расчет привода. Определим общее передаточное число привода по формуле:
![]() (8)
(8)
![]()
Принимаем Uобщ. =30. По ГОСТ 20373-94 выбираем цилиндрический двухступенчатый редуктор типа Ц2-250 и с передаточным отношением U=30; Номинальный крутящий момент на тихоходном валу 825 Нм; КПД=0,96.
Определим фактическую частоту вращения винта.
![]() ,
(9)
,
(9)
![]()
Определение силовых параметров на валу винта
Момент на валу винта определяем по формуле:
![]() ,
(10)
,
(10)
где – механический КПД привода.
![]()
Определим наибольшую действующую продольную силу:
![]() (11)
(11)
где – угол трения материала о поверхность винта; – угол подъема винтовой линии; k – коэффициент, учитывающий радиус действия силы (k=0,7…0,8).
Угол подъема винтовой линии определим по формуле:
![]() (12)
(12)
![]()
Угол трения материала о поверхность винта:
![]() (13)
(13)
где f1 – коэффициент трения частиц груза о поверхность винта, для элементной стружки выбираем по таблице 24 [3, стр. 300] f1 = 0,84.
![]()
![]()
Определим максимальную и минимальную массу груза, передвигающегося по конвейеру:
![]() (14)
(14)
где – скорость груза, м/с.
Определим силу, действующую на один виток:
![]() (15)
(15)
где q' – вес, передвигающийся по конвейеру, Н/м.
![]() (16)
(16)
![]()
![]()
Подбор муфт для привода конвейера. Подберем муфты для соединения вала электродвигателя и быстроходного вала редуктора.
Определим крутящий момент в этом соединении:
![]()
По ГОСТ 21424-93 выбираем упругую втулочно-пальцевую муфту с максимальным крутящим моментом 250 Нм.
Подбор муфты для соединения выходного вала редуктора и вала винта Типоразмер муфты выбираем по диаметру валов и по величине расчетного крутящего момента:
![]()
По ГОСТ 21424-75 выбираем упругую втулочно-пальцевую муфту с максимальным крутящим моментом 8000 Нм.
После проведенных расчетов можно сказать об энергопотреблении и энергозатратах при эксплуатации шнекового конвейера. Из таблицы 2 [40] следует, что применение плавного регулирования скорости транспортера, с помощью частотно-регулируемого электропривода, позволяет снизить электропотребление на 26…38% по сравнению с нерегулируемым электроприводом. Экономия энергии при применении регулируемого привода тем выше, чем ниже загрузка конвейера.
Таблица 2
Потребление энергии конвейерами в зависимости от типа электропривода и нагрузки
|
Тип электропривода конвейера |
Потребление энергии при загрузке конвейера, отн. ед. | |
|
низкой |
высокой | |
|
Нерегулируемый асинхронный Частотно-регулируемый асинхронный |
1,0 0,62 |
1,0 0,74 |
Таким образом, применение частотно-регулируемого электропривода конвейера, обеспечивающего плавное регулирование скорости, позволяет получить максимальную экономию электроэнергии транспортирования стружки при переменном грузопотоке. Немаловажное значение имеет и плавный пуск транспортера.
После проектирования конвейера и необходимого расчета с выбором основных параметров и основного оборудования, требуется произвести привязку транспортера к производственным условиям, то есть, непосредственно к станку.