

Практическая работа № 3
Тема: Мостовой кран.
Задание: Изучение конструкции и принципа работы мостового крана.
Мостовой кран - кран с грузозахватным устройством, подвешенным к грузовой тележке или тали, которые перемещаются по подвижной стальной конструкции (мосту).
Мост крана состоит из двух пролётных балок, соединённых с концевыми. Балки коробчатого сечения выполнены из двух вертикальных стенок, верхнего и нижнего горизонтального поясов. На верхнем поясе пролётной балки закреплён подтележечный рельс, на концах которого установлены упоры для ограничения крайних положений тележки. Для обеспечения прямоугольной формы сечения и устойчивости вертикальных стенок внутри пролётной балки привариваются большие диафрагмы. Кроме того, имеются малые диафрагмы для более равномерной передачи нагрузки от подтележечного рельса на вертикальные стенки. На боковых стенках пролётных балок предусмотрены площадки с перилами для обслуживания грузовой тележки и механизмов передвижения крана, а также для размещения жёстких троллей (стойки с уголковым прокатом).
Механизмы передвижения с цилиндрическими колёсами выполнены по различным схемам: с центральным приводом от одного двигателя, с тормозом и редуктором на два колеса, с раздельным приводом на каждое колесо, а также с фланцевым двигателем и навесным редуктором. Наряду с цилиндрическими колёсами, применяются колёса конической формы. Приводные конические колёса механизмов при центральном приводе установлены вершиной конуса в наружную сторону. У механизмов с раздельным приводом конические колёса устанавливают вершиной конуса в наружную сторону, а неприводные — во внутреннюю. Такая схема называется «обратным конусом». Такая установка колёс центрирует кран на рельсовых путях и не вызывает его перекосов при прохождении искривлённых участков рельсовых путей.
Грузовая тележка состоит из рамы, на которой из унифицированных узлов собраны механизмы подъёма груза и передвижения тележки. Рама выполнена из опирающихся на ходовые колёса двух продольных балок, соединённых поперечными балками и покрытых сверху листом настила. На тележке предусмотрены ограничители высоты подъёма крюковой обоймы, линейка для выключателей её крайних положений на мосту крана, буфера и перила ограждения.
Мостовой электрический кран
1- кабина, 2 – подкрановый путь, 3 – ходовые колеса, 4 – концевые балки, 5 – питающий гибкий кабель, 6 – барабан механизма вспомогательного подъема, 7 – барабан механизма главного подъема, 8 – крановая тележка, 9 – трос, 10 – кабина для осмотра главных троллей, 11 – мост крана, 12 – механизм передвижения тележки, 13 – механизм передвижения крана.

Вывод: я изучила принцип работы и схему мостового крана.
Практическая работа № 4
Цель: ознакомиться с принципом действия манипуляторов.
Задание: изучить конструкцию принципа действия манипуляторов.
Манипуляторы предназначены для установки изделий в удобное для сварки положение путем поворота их вокруг двух осей (наклона и вращения), а также для вращения их со сварочной скоростью при автоматической и полуавтоматической сварке, наплавке и металлизации.
Манипуляторы разделяют по назначению, количеству движений, конструкции приводов для вращения и наклона изделий, предельному углу наклона и грузоподъемности. Манипуляторы с маршевой и сварочной скоростями обеспечивают, кроме установки изделии к удобное для сварки положение, вращение их в этом положении с маршевой и сварочной скоростями. Манипуляторы, не имеющие сварочной скорости, обеспечивают только установку изделий в удобное для сварки положение. Эти манипуляторы называют позиционерами.
Манипуляторы со сварочной скоростью применяют для сварки круговых швов на цилиндрических и рамных изделиях, манипуляторы без сварочной скорости применяют для сварки рамных, корпусных и других изделий. По количеству движений манипуляторы различают на обеспечивающие только поворот изделия вокруг двух осей (наклон и вращение) и обеспечивающие, кроме этого, еще и подъем изделия.
Привод вращения большинства манипуляторов электрический. Современные манипуляторы имеют, как правило, плавную (бесступенчатую) регулировку скорости вращения, осуществляемую изменением частоты вращения электродвигателя постоянного тока. Возможно применение для этой цели механических вариаторов.
Первые модели манипуляторов имели привод механизма вращения! со сменными шестернями, обеспечивающий ступенчатое изменение чисел оборотов.
Привод механизма наклона манипуляторов - электрический или гидравлический. Модели небольшой грузоподъемности могут
иметь ручной привод наклона. Предельный угол наклона планшайбы составляет 45—360° и зависит от конструкции манипулятора, а также от его грузоподъемности.
Большинство существующих моделей представляет собой манипуляторы с зубчатым сектором, в которых механизмы расположены внутри общего корпуса. На этом же корпусе находится планшайба для крепления изделия; таким образом, изделие в исходном положении размещается над корпусом, что обеспечивает компактность всей установки.
На рис. 72 изображен
манипулятор М-1 грузоподъемностью 1 т с
зубчатым сектором и электроприводом.
Манипулятор состоит из сварно-литого
корпуса 3,
установленного
на опорные лапы 4,
поворотного
стола 2
с планшайбой
/ и механизмом вращения. Внутри корпуса
находится механизм наклона. Электроаппаратура
расположена в отдельно стоящем шкафу.
Механизм вращения состоит из электродвигателя постоянного тока 1 (рис. 73, а) и черничных редукторов 4 и 5. Электродвигатель соединен с редуктором 4 эластичной муфтой б. Червячная шестерня редуктора 5 закреплена на шпинделе стола, на конусе которого укреплена планшайба. Тиристорная схема управления обеспечивает плавное изменение чисел оборотов электродвигателя. Регулировки осуществляется с помощью резистора, расположенного на боковой стенке шкафа. Стабильность заданной скорости сварки обеспечивается системой обратной связи с тахогенератором 5, соединенным с электродвигателем набором промежуточных шестерен 2.
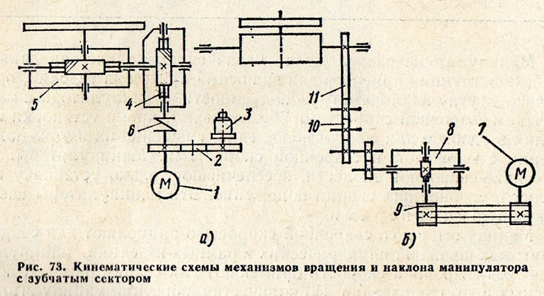
Механизм наклона (рис. 73,6) состоит из асинхронного электродвигателя 7, клиноременной передачи 9, глобоидного редуктора 8, набора шестерен 10 и зубчатого сектора 11, закрепленного на столе манипулятора. Для предотвращения аварии при наклоне стола на угол, больший предельного, в крайних положениях (0 и 135° к горизонту) механизм наклона автоматически выключается двумя конечными выключателями. Кроме того, предусмотрены аварийные упоры. Управление манипулятором - кнопочное и может осуществляться с переносного пульта или с пульта автосварки, в котором сблокировано управление манипулятором совместно со сварочным автоматом. Угол наклона планшайбы контролируется по указателю, расположенному на цапфах стола. На манипуляторе имеется номограмма для определения необходимого числа оборотов стола по заданной скорости сварки и диаметру свариваемого шва.
Исходное положение
— ось шпинделя вертикальна, планшайба
расположена горизонтально (рис. 74, а). В
этом положении изделие устанавливают
и закрепляют па манипуляторе.
Штрих-пунктиром показано положение для
сварки «в лодочку» нижних швов, при этом
планшайба наклонена под углом 450.
Для сварки «в лодочку» швов, которые в
исходном положении являются потолочными,
планшайба должна быть наклонена
под углом 135° (рис. 74, б). Для сварки н
нижнем положении вертикальных швов
планшайбу наклоняют на 90° (рис. 74, б,
штрихпунктирная линия). 
Для сварки крупногабаритных изделий манипулятор устанавливают на специальной подставке — тумбе, лапы манипулятора снимают. Иногда (в зависимости от размеров изделия) приходится делать приямок.
Вывод: я ознакомилась с принципом действия манипуляторов, изучила конструкцию принципа действия манипуляторов.