

Filimonov_KONSPEKT_TMM
.pdf
|
11 |
Универсальная структурная формула механизмов: |
(1.3) |
W = 6 n −(5 p5 +4 p4 +3 p3 +2 p2 + p1 ) , |
|
здесь n - число подвижных звеньев механизма, n = m −1. |
|
1 |
|
2
3
4
5
Рис. 1.3.
Для однозначного и закономерного движения звеньев необходимо чтобы число степеней W соответствовало бы числу одноподвижных приводов, дающих входное движение в механизме. При этом входные движения от приводов должны быть взаимно согласованы. Если этого не будет, то механизм вероятнее всего через некоторое время самозаблокируется. То же самое произойдет в том случае, если число одноподвижных приводов больше числа степеней подвижности. Если число приводов меньше степени подвижности, то звенья такого механизма движутся не закономерно, не предсказуемо.
Для упрощения конструкции, а, следовательно, и анализа механизма, необходимо минимизировать число W до единицы.
1.4.ВИДЫ ЗВЕНЬЕВ МЕХАНИЗМА
-Стойка – неподвижное звено. Стойка всегда одна, представляет собой корпус машины.
-Входные звенья - звенья, которым задают входное внешнее движение, либо сообщают обобщенную координату. Все остальные звенья – выходные.
-Ведущие звенья – звенья, которые соединены с внешним приводом или на которые действует внешняя движущая сила. Все остальные звенья являются ведомыми. Среди них выделим отдельно:
-рабочие звенья – звенья, на которые действует рабочая технологическая нагрузка, т.е. которые непосредственно выполняют цели функционального назначения.
Чаще всего входные и ведущие звенья совпадают. В качестве входного движения задается вращательное движение, описать которое легче всего.
12
Вращательное движение: угол поворота может изменяться до бесконечности, а координаты положений остальных звеньев имеют периодическую закономерность.
1.5. СЕМЕЙСТВА МЕХАНИЗМОВ
Очень часто кинематические пары механизмов имеют общие условия связей, например все звенья механизма не могут перемещаться вдоль оси z или не могут поворачиваться вокруг оси y. В зависимости от числа общих условий связей механизмы разделяют на семейства.
Номер семейства механизма равен числу условий связей. 0-е семейство – нет общих условий связей
W = 6 n −(5 p5 + 4 p4 +3 p3 + 2 p2 + p1 ). |
|
|
1-е семейство – одно условие связи |
|
|
W = 5 n −(4 p5 +3 p4 + 2 p3 + p2 ). |
|
|
2-е семейство – два условия связи |
|
|
W = 4 n −(3 p5 + 2 p4 + p3 ). |
(1.4) |
|
3-е семейство – три условия связи |
||
|
||
W = 3 n −(2 p5 + p4 ). |
|
|
4-е семейство – четыре условия связи |
|
|
W = 2 n − p5 . |
|
|
5-е семейство – пять условий связи |
|
|
W = n. |
|
1.6. ПРИМЕРЫ МЕХАНИЗМОВ РАЗЛИЧНЫХ СЕМЕЙСТВ
5-е семейство.
Механизм электродвигателя, в котором одно подвижное звено движется относительно стартера электродвигателя.
4-е семейство.
Механизм клинового зажима (рис. 1.4.).
 Q A
Q A
 y
y
1
А
x
z 
Рис. 1.4. Q – рабочая (технологическая) нагрузка.
Определим степень подвижности механизма:
W = 2 n − p5 = 2 2 −3 =1.
W =1 - означает, что в механизме одно независимое входное движение, следовательно, необходим один одноподвижный привод.

13
При выборе ведущего звена следует выбирать такое, которое в данном механизме дает наибольший КПД механизма.
3-е семейство.
Все плоские механизмы относятся к механизмам третьего семейства. Кривошипно-ползунный механизм (рис. 1. 5.).
|
у |
|
2 |
1 |
|
j1 |
х |
z |
3 |
|
Рис. 1.5.
Степень подвижности механизма:
W = 3n − 2 pн − pв = 3 3 − 2 4 −0 =1.
W =1 - означает, что в механизме одно независимое входное движение, следовательно, необходим один одноподвижный привод.
2-е семейство.
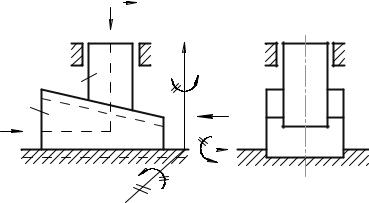
Механизм винтового домкрата (рис. 1.6.).
|
|
7 |
|
2 |
8 |
6 |
5 |
|
|
1
3 |
лев |
пр |
4 |
y |
|
х
z 
Рис. 1.6.
Степень подвижности механизма:
W = 4 n −(3 p5 + 2 p4 + p3 ) = 4 8 −3 10 = 2.
W = 2 означает, что механизм имеет два независимых входных движения, следовательно, требуется два одноподвижных привода, но в данном случае можно обойтись и одним вращающимся приводом.
Данный механизм относиться к симметричным механизмам. Входные движения в таких механизмах или абсолютно одинаковые или симметричны.

14
1-е семейство.
Пространственный ползунный механизм (рис. 1.7.). 1- кривошип, 2- шатун, 3- ползун.
Степень подвижности механизма:
W = 5 n − 4 p5 −3 p4 − 2 p3 − p2 = 5 3 − 4 2 −3 0 − 2 2 = 3.
z |
1 |
x
2
|| y
3
Рис. 1.7.
W = 3 - означает, что механизму необходимо три входных движения, но в данном случае достаточно одного входного движения, связанного с внешним приводом, т.к. в данном механизме возникают «избыточные» степени подвижности, которые привнесены здесь сферическими шарнирами, каждый из этих шарниров дает по одной избыточной W. Если поставить сферический шарнир с пальцем, при этом канавка должна обеспечить требуемый закон перемещения звеньев, то получим пару четвертого класса с W=1.
0-е семейство.
Используется очень редко, как исключение.
Все перечисленные механизмы могут быть пространственными, но чаще исполняются как плоские.
1.7. ПЛОСКИЕ МЕХАНИЗМЫ
Плоские механизмы – механизмы, звенья которых движутся в одной или нескольких параллельных плоскостях (к ним относятся механизмы, передающие движение в ортогональных плоскостях).
Основные виды плоских механизмов:
-рычажные,
-зубчатые,
-кулачковые,
-зубчатые рычажные,

15
- механизмы с вынужденной остановкой рабочего звена (с периодической остановкой). Чаще всего к ним относятся мальтийские механизмы (рис. 1.8.). Вращающийся рычаг 1, зацепляясь роликом с пазом звена 2, обеспечивает поворот этого звена.
2
1
Рис. 1.8.
Плоские рычажные механизмы – механизмы, звенья которых имеют стержневую, рычажную конфигурацию или структуру. Исполняются как механизмы технологических машин, транспортных устройств и как механизмы приборов.
z
y |
|
Механизм третьего семейства |
||
|
(рис. 1.9.): |
|
||
|| |
|
|
||
|
W = 3 n − 2 p5 − p4 = 3 n − 2 pн − pв |
|||
1 |
2 |
n = 3 |
|
W = 3 3 − 2 4 =1. |
p5 = p4 |
|
|||
j1 |
|
= 4 |
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
|
x |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
Рис. 1.9. |
|
|
|
Все плоские механизмы относятся к механизмам третьего семейства.
Для того чтобы создавать и синтезировать плоские рычажные механизмы, необходимо знать из каких первичных структур они состоят. Таких структур установлено две:
1. механизмы первого класса - представляют собой звено и стойку, входящие в КП пятого класса.
Приводом является электродвигатель, ДВС, гидроили пневмомотор, позволяющие получить полный оборот подвижного звена.
При неполном повороте подвижного звена используются шиберные гидроили пневмодвигатели (рис. 1.10.).

16
|
1 |
р нагне- |
р слива |
тания |
Рис. 1.10.
Для обеспечения вращения на несколько оборотов используются гидравлические или пневматические цилиндры, где сам цилиндр будет
неподвижным, а двигаться будет поршень со штоком (рис. 1.11.):
1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p нагне- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р слива |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
тания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а). |
|
|
|
|
|
|
|
|
б). |
|||||||||||||||||||
Рис. 1.11.
2. группы Ассура.
1.8. ГРУППЫ АССУРА
Группа Ассура - плоская незамкнутая кинематическая цепь, состоящая из КП пятого класса, которая при присоединении крайними свободными элементами к стойке обладает нулевой степенью подвижности.
W = 3 n − 2 p5 = 0.
n 2 4 …
p5 3 6 …
Группа, состоящая из двух звеньев – группа Ассура второго класса – диада. Подавляющее большинство существующих рычажных механизмов состоит только из диад, оставшаяся часть механизмов включает в себя группы третьего класса. Группы четвертого класса в принципе не используются в механизмах, причина такого неравномерного распределения в резко возрастающей
структурной сложности механизма при переходе от класса к классу.
В настоящее время при синтезе механизмов используют пять видов диад. Рассмотрим эти виды:
1). Диада первого вида - тип ВВВ (рис. 1.12.).

17
(1) |
(2) |
Рис. 1.12.
Группы Ассура вне механизма имеют три кинематических пары, из них две будут кажущимися (виртуальными). Они станут реальными при соединении этой группы к другой структуре.
2). Диада второго вида - тип ВВП (рис. 1.13.).
(1) (2)
Рис. 1.13.
Порядок обозначения в типе группы представляет собой последовательность передачи движения от входного движения (от одной КП к другой).
Частным случаем диады второго вида является тип ПВВ, который встречается реже.
3). Диада третьего вида - тип ВПВ (рис.1.14.).
(1) |
(2) |
(1) |
(2) |
|
|
а). |
б). |
Рис. 1.14. |
|
4). Диада четвертого вида - тип ПВП (Рис. 1.15.). |
|
(1) |
|
(2) |
|
|
|
(2) |
(1) |
|
а). |
Рис. 1.15. |
б). |
5). Диада пятого вида. |
|
||
|
|
||
Тип ВПП (рис. 1.16.). |
|
|
|
(1) |
(2) |
(1) |
(2) |
|
|
||
|
а). |
Рис. 1.16. |
б). |
|
|
|
|

18
1.9.ПРИНЦИП СИНТЕЗА ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Плоские рычажные механизмы образуются путем присоединения к механизму первого класса одной или нескольких групп Ассура, при этом одной потенциальной КП группа должна быть присоединена к стойке. Порядок присоединения групп друг другу может быть произвольным, с тем лишь условием, чтобы сохранялась возможность передачи движения, желательно с максимально возможным КПД.
1). Кривошипно-коромысловый механизм (рис. 1.17.). Образуется путем присоединения к механизму первого класса группы Ассура ВВВ. Кроме нумерации звеньев в группе введем нумерацию звеньев в механизме.
2 (1)
1 |
3 |
|
(2)
0 0
Рис. 1.17.
2). Кривошипно-ползунный механизм (рис. 1.18.). Образуется путем присоединения к механизму первого класса группы Ассура ВВП.
(2) 3
(1) 2
1
Рис. 1.18.
3). Кривошипно-кулисный механизм (рис. 1.19.). Образуется путем присоединения к механизму первого класса группы Ассура ВПВ.

19
(2) |
3 |
|
(1) 2 |
|
2 |
|
|
(1) |
1 |
1 |
3 |
|
(2)
а). |
б). |
|
Рис. 1.19. |
Шарниры, связанные с ползунами целесообразно устанавливать на самом ползуне, причем так, чтобы ось этого шарнира проходила через центр масс ползуна на направляющей. При этом возрастает суммарное давление между звеньями, а значит и сила трения. Часто эта дополнительная сила трения становиться такой, что передача движения становиться невозможной, при любой движущей силе. Невозможность передачи движения называется самозаклиниванием, самоторможением (КПД=0).
4). Механизм первого класса + гр. ПВП (рис. 1.20.).
3
(2)
1 2
(1)
Рис. 1.20. 5). Тангенсный механизм (рис. 1.21.).
y |
3 |
|
|
2 |
H |
|
1 |
|
w |
А |
|
1 |
f |
|
О |
1 |
х |
|
||
|
|
|
|
Рис. 1.21. |
|

20
yM = y0 +OAsinϕ1 .
Особенность тангенсного механизма в том, что входное звено 1 не может совершать более одного поворота и −900 <ϕ1 < +900 - никогда не принимает таких значений.
ϕ1 → 900 - приближенное условие передачи движения стремительно ухудшается.
6). Синусный механизм (рис. 1.22.).
y 
А
Н
|
1 |
2 |
3 |
О
х
Рис. 1.22.
0 <ϕ1 < 3600 .
yM = y0 + rOA sinϕ1 .
7). Поступательный механизм (рис. 1.23.). Образуется путем присоединения к механизму первого класса группы Ассура ПВВ.
y 
А
Н
3 |
2 |
1 |
О
х
Рис. 1.23.
Этот механизм хуже его антипода.
8). Поступательный механизм первого класса + гр. ВВВ (рис. 1.24.).
1 |
2 |
3 |