

Filimonov_KONSPEKT_TMM
.pdf51
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
4.1. ЗАДАЧИ СИЛОВОГО АНАЛИЗА
Задачи силового анализа:
-определение сил, действующих на звенья машины;
-определение факторов инерции звеньев;
-определение сил взаимодействия звеньев.
Первая задача:
1. Определение весов звеньев. Рассмотрим рычажное звено (рис. 4.1.)
li
Bi
Si
 Gi
Gi
Ai
Рис. 4.1.
S – центр масс.
На этапе проектного расчета, когда форма звеньев не определена, веса звеньев определяем ориентировочно.
g – вес единицы длины, g[H м]. |
|
Gi = g li |
(4.1) |
Gmax = k Gшатуна ,
k = 2,0 ÷20 .
После проработки конструкции веса звеньев уточняются:
G = ρ V g |
(4.2) |
2. Технологические или рабочие нагрузки –приложены на рабочее звено |
|
машины, те нагрузки, для преодоления которых создаются |
машины (пр: для |
преодоления усилия точения создается токарный станок). Технические нагрузки можно определить двумя способами:
1)они определяются с помощью специальных курсов;
2)экспериментальное определение - с помощью эксперимента, с помощью тензодатчиков.
Тензодатчик – оценивает величину деформации технологического звена, при этом величина деформации пропорциональна нагрузки.
Тарируя тензодатчик (тарировка – установление коэффициента) определяем величину нагрузки.

52
Достоверное определение нагрузок – длительная, дорогостоящая задача. Результатом является график или формула:
Q = Q(ϕ1 ) |
|
|
|
|
(4.3) |
Q = Q(SВЫХ ) |
||
Q = Q(t) |
|
|
Наложив график на перемещение выходного звена, получим величину усилия в каждом положении механизма (рис. 4.2.).
|
y |
f |
|
1 |
|
w |
x |
1 |
|
A
Q
B
Р.Х.
Q |
Sвых |
Рис. 4.2.
Рабочая нагрузка, график изменения которой показан на рис. 4.2., направлена со стороны преобразуемого материала на рабочее звено (и направлена в большинстве случаев против скорости выходного звена).
Рабочую нагрузку принято задавать в виде силы, если рабочее звено движется поступательно, или в виде момента силы, если поворачивается или вращается.
Вторая задача: факторы инерции
Если звено движется не равномерно, то в нем возникает ускорение, которое приводит к появлению сил. Для учета этих массовых сил в силовом расчете их заменяют равнодействующей, приложенной в центре масс, эта равнодействующая называется силой инерции. Кроме сил инерции на звене возникает момент сил инерции. Для оценки обоих факторов инерции рассмотрим четыре разных вида движения звена.
53
1. Звено движется поступательно – ускорение всех точек звена одинаковое по величине и направлению.
|
|
|
(4.4) |
Фm = −mi aSi |
|||
2. Вращательное движение вокруг оси, проходящей через центр масс (рис. 4.3.).
МФ – момент сил инерции направленный против углового ускорения.
MФi
 wi
wi
Si  O
O
ei
Рис. 4.3.
Момент силы инерции:
|
|
Фi = −ISi εi . |
(4.5) |
|
М |
Isi – физический момент инерции относительно оси, проходящий через центр масс - Si.
Isi – мера инертности при вращательном движении [кг м2 ].
3. Вращательное движение вокруг оси, не проходящей через центр масс
(рис. 4.4.).
|
MФi |
|
w |
|
i |
aSi |
O |
|
Si |
|
Фi |
|
|
|
|
|
|
|
e |
|
|||||
|
|
|
i |
|
||
|
|
|
Рис. 4.4. |
|
||
В этом случае инерция сводится к двум силовым факторам, которые |
||||||
действуют одновременно и независимо друг от друга. |
|
|||||
|
|
|
|
|
|
|
Фm = −mi aSi , |
(4.6) |
|||||
|
|
|
|
|
||
МФi = −ISi εi |
||||||
|
||||||
54
4. Плоско-параллельное движение звена - равно сумме двух движений: поступательного вместе с центром масс и поворотного вокруг центра масс. Действуют оба силовых фактора.
Третья задача:
Поскольку звенья между собой взаимодействуют в местах их подвижного соединения, то эта задача сводится к определению реакций в К.П.
Для решения этой задачи используется принцип Даламбера:
Механическую систему можно рассмотреть в состоянии равновесия, если наряду с активными силами к ней приложить факторы инерции.
Для системы, находящейся в равновесии, можно составить систему уравнений равновесия. Для однозначного решения такой системы необходимо, чтобы число уравнений было равно числу неизвестных, а это возможно для статически определимой механической системы.
В плоских рычажных механизмах статически определимыми являются группа Ассура и отдельное рычажное звено.
Для плоской системы записывают три уравнения равновесия.
Под равновесием механической системы понимают не неподвижное ее состояние, а лишь равновесие в данный момент времени.
Для того чтобы воспользоваться принципом Даламбера реактивных сил, необходимо представить реакцию как активную силу. Для этого достаточно при рассмотрении звена группы Ассура мысленно отбросить остальную часть механизма, но действие отброшенной части заменить силой, которая в такой постановке будет внешней или активной для данного звена. Эта сила и будет реакцией опоры.
Реакция как сила характеризуется тремя параметрами:
1.величиной модуля;
2.направлением в пространстве;
3.точкой приложения.
При определении реакции во вращательной КП пятого класса необходимо определить модуль и направление, точкой приложения считается центр шарнира.
Для поступательной пары при определении реакции достаточно определить только величину (модуль), направление перпендикулярно направляющей, а точка приложения условно по середине узла ползуна.
Для профильной КП четвертого класса достаточно определить модуль реакции, направление по нормали к точке контакта, а точка приложения - точка контакта звеньев.
Задача силового расчета заключается в последующем определении реакции на каждом звене или каждой группы Ассура (начиная с конца механизма, с конца КЦ).
55
4.2.МЕТОДЫ РЕШЕНИЯ ЗАДАЧ СИЛОВОГО АНАЛИЗА
1.Аналитический – составляется система уравнений равновесия, которая является линейной и решается методами математического анализа.
Используется вычислительный подход (можно не получать аналитические выражения, а а вычислять неизвестные величины в стандартных программах).
С помощью вычислительного подхода можно определить реакции за весь кинематический и рабочий циклы.
2.Графический (метод планов и сил) – составляются уравнение равновесия
ввекторном виде, строится в виде плана сил, при этом замыкающие вектора плана и есть неизвестные реакции.
Метод позволяет увидеть характер передачи и распределение сил по механизму.
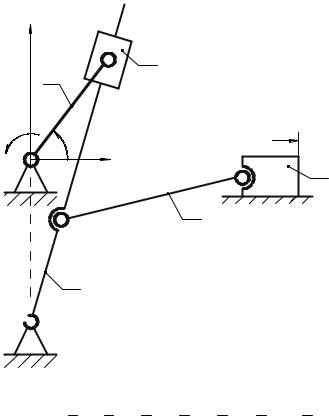
4.2.1.АНАЛИТИЧЕСКИЙ МЕТОД
Рассмотрим на примере кривошипно-кулисного механизма с ползунной частью (рис. 4.5.).
y
А 2
1
w
1
О
B 
j |
|
Q |
1 |
|
|
х |
D |
5 |
|
||
|
4 |
|
C |
|
|
3 |
|
|
Рис. 4.5.
Определим реакции в КП: R0 ; RA ; RB ; RC ; RD ; R5−0 ; R2−3 .
Для того, чтобы решить эту задачу должны быть известны все размеры в механизме, положения центров масс (локальные координаты) на звене, веса звеньев и физические моменты инерции; должна быть решена задача по определению скоростей и ускорений масс – это даст возможность определить факторы инерции; должна быть известна технологическая нагрузка, лучше всего в виде перемещения выходного звена, и закон движения входного звена.
56
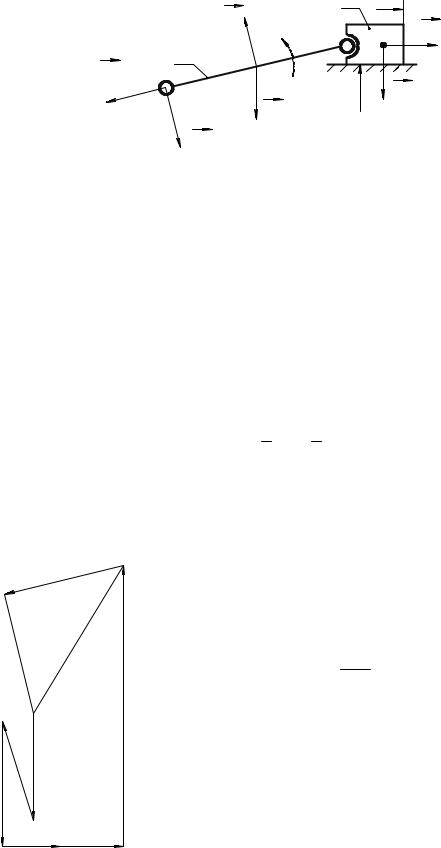
Разобьем механизм на группы Ассура, начиная с конца, и приложим к группе все действующие силовые факторы (рис. 4.6.).
|
Ф4 |
5 |
Q |
|
D |
Ф5 |
|
|
|
||
4 |
S4 |
MФ4 |
S5 |
R n |
|
|
|
4- 3 |
C |
G5 |
|
||
|
G4 |
|
|
|
R4t- 3
Рис. 4.6.
Для решения этой задачи необходимо составить три уравнения равновесия. Рассмотрим звено 4:
∑МD (Pi ; M i ) = 0 , |
|
Rτ4−3 lCD + M D (Ф4 ) − M D4 = 0 |
(4.7) |
Из (4.7) найдем Rτ4−3 =...(н) , если число |
положительно, то выбранное |
направление неошибочно.
Рассмотрим группу звеньев 4-5 и составим векторную группу сил:
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∑ |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рi = 0 |
|
|||||||||||||||||||
i=1 |
|
|
4n−3 + |
|
4τ−3 + |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.8) |
||
|
|
|
|
R |
R |
G4 + |
Ф4 +G5 +Ф5 +Q + R5−0 = 0 . |
|||||||||||||
В этом уравнении неизвестны силы R4τ−3 и R5−0 .
Одно векторное уравнение при известных направлениях сил заменяет систему из двух скалярных векторов.
Для определения неизвестных реакций построим план сил (рис. 4.7.).
lR4t- 3
lR5- 0
lR4n- 3 lR4- 3
 lФ4
lФ4 
lG |
lG |
|
4 |
|
|
5 |
|
|
|
|
|
lФ |
lQ |
Рис. 4.7. |
5 |
|
K P = |
|
|
Q |
|
|
н |
, |
|
|
|
|
|
= ... |
|
|
||
|
|
|
|
|
||||
|
lQ |
|
|
|||||
|
|
|
|
мм |
|
|||
коэффициент показывает, сколько ньютонов сил содержится в одном мм вектора сил.
lτR4−3 = Rτ4−3 = ...(мм),
KP
lG |
= |
G4 |
= ...(мм), |
|
|||
|
4 |
K P |
|
|
|
|
|
...................

57
Графич. означ. замкн. многоуг-к, если сумма равна нулю.
RC = R4−3 = lR4−3 KP = ...(н),
R5−0 = lR5−0 KP = ...(н).
Реакция в шарнире должна быть соизмерима максимальной нагрузке.
Для определения реакции в шарнире D рассмотрим равновесие четвертого либо пятого звена.
n
Звено 4: ∑Рi = 0 ,
i=1
|
|
4−3 + |
|
|
|
|
|
|
(4.9) |
|
R |
G4 + |
Ф4 + R4−5 = 0 . |
||||||
В данном выражении неизвестна сила R4−5 по величине и направлению.
RD = R4−5 = lR4−5 KP =...(н) .
Если цент масс ползуна не лежит на оси шарнира, соединяющего шатун и ползун, то на ползуне возникает эффект переноса от действующего изгибающего момента Мизг.
Мизг. = МS 5 (Q) + МS 5 (R5−4 ) = M D (G5 ) + M D (Ф5 ) + M D (Q) . |
(4.10) |
PM |
|
Q |
|
|
|
K1 |
S5 |
K2 |
|
||
|
|
|
|
Mизг |
PM |
|
lполз |
|
Рис. 4.8.
РМ = Мl изг полз
За счет зазора поступательной КП происходит небольшой поворот ползуна в направляющих в направлении и под действием изгибающих моментов.
К1 и К2 – точки контакта.
Мизг = РМ lполз .
РМ – дополнительная реакция от действия изгибающего момента.
(4.11)
R |
•) K1 |
= R |
+ R |
|
|
|
5−0( |
5−0 |
|
M |
(4.12) |
||
R5−0(•) K |
2 |
|
|
|
||
|
|
|
|
|||
|
= R5−0 − RM |
|
||||
R5−0 - номинальная реакция опоры,
R5−0(•) - действительная реакция.
Часто RM сопоставима с R5-0 или даже ее превышает.
При проектировании ползунного механизма необходимо, если не удается получить изгибающий момент равный нулю, минимизировать РМ или увеличить длину ползуна (см. (4.11)).
Определение реакций в кривошипно-кулисном механизме

58
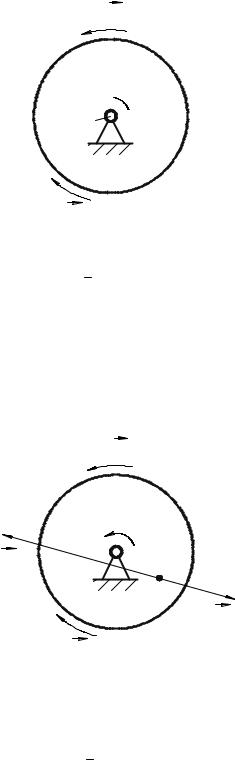
4.3. СИЛОВОЙ АНАЛИЗ ВХОДНОГО ЗВЕНА (КРИВОШИПА)
Входное звено – это звено основного технологического механизма. Часто от этого звена идет движение и на другие вспомогательные механизмы, а от куда приходит движение на кривошип?
Движение приходит от двигателя. Если двигатель гидромотор или пневмомотор, то выходной вал жестко и посредственно связан с кривошипом. Если двигатель электрический или ДВС, то между ними (в большинстве случаев стоит передаточный механизм).
Сам кривошип (чаще всего) - коленчатый вал. С учетом сказанного
изобразим блок схему машинного агрегата. |
|
|
|
1-е исполнение |
2-е исполнение |
||
A |
R1- 2 |
A |
R1- 2 |
|
|
||
|
|
|
w |
|
|
|
|
|
1 |
|
|
O |
|
|
O |
колесо |
|
G1 |
|
|
G1 |
|
|
|
|
|
|
|
|
Рис. 4.9. |
|
|
|
|
|
Кривошип связан с муфтой. |
|
O |
вал |
|
|
Кривошип – центр масс на оси |
|
|
|
|
|
вращения. |
|
|
|
|
|
|
|
|
|
Рис. 4.10. |
|
|
|
|
Кривошип |
жестко |
связан с |
|
|
зубчатым |
колесом, |
которое |
|
|
|
зацепляется шестерней, |
находящейся |
||
|
|
на входном |
валу передаточного |
||
Звено 1: ∑PGi = 0 , |
|
механизма. |
|
|
|
|
|
|
|
|
|
RG |
+ G + R |
|
= 0 |
|
(4.16) |
1−2 |
1 1−0 |
|
|
|
|
Первое исполнение:
R1−0 - реакция на коренных подшипниках.
Построим уравнение (4.16) в масштабе K P (рис. 4.11.).
R1- 2
R1- 0
 G1
G1
Рис. 4.11.
59
R01 = ROП = |
R1−0 |
. |
|
2 |
|
||
|
|
|
|
Второе исполнение: |
(4.17) |
||
|
|
Fn rb кол = R1−2 hR1−2 |
|
M 0 (R1−2 ) = −M 0 (Fn )
rb кол - радиус основной окружности зубчатого колеса. hR1−2 - плечо данной силы до шарнира О.
Fn = hr R1−2 R1−2 .
b кол
Составим уравнение сил для второго исполнения:
∑Pi = 0 , |
|
|
|
|
|
|||
RG1−2 + G1 + Fn + R1−2 = 0 |
(4.18) |
|||||||
Построим уравнение (4.18) (рис.4.12.). |
|
|
|
|
|
|||
R1- 2 |
R |
|||||||
|
|
|
|
1- 0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
G |
|
|
Fn |
|||||
|
||||||||
1 |
Рис. 4.12. |
|
|
|
|
|
||
|
|
|
|
|
|
|||
Сравнивая оба плана сил для двух исполнений кривошипа видим, что второй вариант дает существенно большую реакцию на коренных подшипниках.
Нужно ли создавать такую конструкцию? Продолжим анализ входного звена.
A R1- 2
Mкр.
 Mп.д.
Mп.д. 
w
1 MC
O
 G1
G1
Рис. 4.13.
МC = R1−2 hR1−2 .
Этот момент назовем общим моментом сил R от технологических и вспомогательных моментов.
Этот момент является суммарной нагрузкой со стороны исполняющих механизмов.
Этот момент предшествует вращению кривошипа и по направление точки всегда противоположно вращению кривошипа.
M пд - приведенный к валу кривошипа момент движущих сил. Это
суммарная обобщенная нагрузка привода (движущей силы) на кривошип. Направление этого момента почти всегда совпадает с вращением
(генераторный режим двигателя, когда против вращения, явление вредное, от него нужно избавляться).

60
M пд = Мд ωωд |
ηд−1 |
(4.19) |
1 |
|
|
M д - движущий момент на валу двигателя.
iд−1 = ωд - передаточное отношение.
ω1
ηд−1 - коэффициент полезного действия от двигателя к кривошипу.
ηд−1 =ηΙ - КПД первой группы звеньев.
В эту группу входят: ротор двигателя, звенья передаточного механизма.
Из (4.19) M пд > M д , Nд > N1 , η± = Ni .
МG |
Nд |
С + Мпд + МФΙ = 0 |
МФΙ - момент сил инерции первой группы звеньев.
МGФΙ = −Jn εG1
J n - приведенный момент инерции звеньев первый группы.
n |
|
|
|
2 |
|
ωi |
2 |
|
|
VSi |
|
|
|
||||
JnΙ = ∑ mi |
|
|
|
+ J Si |
|
|
|
|
ω |
|
ω |
||||||
i=1 |
|
|
i |
|
1 |
|
|
|
(4.20)
(4.21)
(4.22)
Чаще всего в передаточном механизме VSi = 0 .
Уравнение (4.20) есть моментное уравнение на кривошипе. Уравновешивающей силы нет.
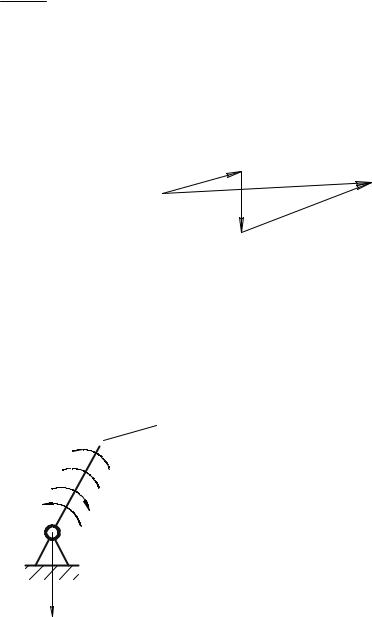
4.4. ГОДОГРАФ
Годограф – траектория конца вектора исходящего из одной точки и имеющего последовательность различных направлений. В результате получим спектр нагрузки за кинематический цикл. Такой спектр нагрузки легче всего выразить с помощью годографа.
Построим годограф реакций в шарнире О (рис. 4.13.).
Ry
R7
R1
R6
Rx
R5
R4 R3 R2
Рис. 4.13.