


Методические указания к решению задачи № 7
Метод, в котором за основные неизвестные принимаются угловые и линейные перемещения узлов системы и который позволяет их найти, называется методом перемещений.
Общее число неизвестных метода перемещений называют степенью кинематической неопределимости, она определяется как сумма неизвестных углов поворота nу и неизвестных независимых линейных перемещений nл:
n = nу + nл. |
(18) |
nу равно числу жестких узлов (узел, в котором жестко соединено не менее двух стержней), nл определяется по шарнирной схеме, которую получают путем введения шарниров в жесткие узлы и жесткие заделки по формуле:
nл = 2У −С −С0 , |
(19) |
где У – число шарнирных узлов рамы, включая опорные, С – число стержней рамы, С0 – число опорных стержней.
Например, на рис. 57, а представлена статически неопределимая рама. Число жестких узлов nу = 2 (узлы С и D). Шарнирная схема рамы показана на
рис. 57, б. Число независимых линейных перемещений nл = 2 6 −5 −5 = 2. Таким образом, степень кинематической неопределимости рамы составит
n = nу + nл = 2 + 2 = 4.
Для того, чтобы предотвратить угловые перемещения рамы, в узлы С и D вводим дополнительные жесткие заделки, а для предотвращения линейных перемещений вводим дополнительные опорные стержни (рис. 57, в). Таким образом получаем основную систему метода перемещений.
В дополнительных закреплениях возникают реакции (Z1, Z2, Z3, Z4), которые и являются основными неизвестными метода перемещений.
а) |
|
|
б) |
|
в) |
Z1 |
|
B |
C |
D |
B |
C |
D Z |
Z2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
B |
C |
D |
A |
F |
E |
A |
F |
E |
|
|
|
|
E Z4 |
|||||
|
|
|
|
|
A |
F |
Рис. 57. Статически неопределимая рама
65
Если заданная система n раз кинематически неопределима, то после наложения на нее n дополнительных связей, устраняющих возможные перемещения ее узлов и приложения к ним неизвестных перемещений Z1, Z2, Z3,…, Zn, система канонических уравнений метода перемещений для определения неизвестных будет представлена в виде:
r11Z1 + r12 Z2 +... + r1n Zn + R1P = 0; |
|
|
r21Z1 + r22 Z2 +... + r2n Zn + R2P = 0; |
(20) |
|
..................................................... |
||
|
||
rn1Z1 + rn2 Z2 +... + rnn Zn + RnP = 0 |
|
где rii (r11, r22, …, rnn) – реакция, возникающая в дополнительной связи i, где имеется перемещение Zi, от смещения этой же связи на единицу, rik (r12, r21, …, rn2) – реакция, возникающая в дополнительной связи i, где имеется перемещение Zi, от смещения связи k на единицу, RiP – реакция, возникающая в связи i от действия на основную систему нагрузки.
Основная система метода перемещений представляет собой совокупность независимых однопролетных статически неопределимых балок. Эти балки уже заранее рассчитаны на все виды воздействия (кинематическое, силовое и температурное).
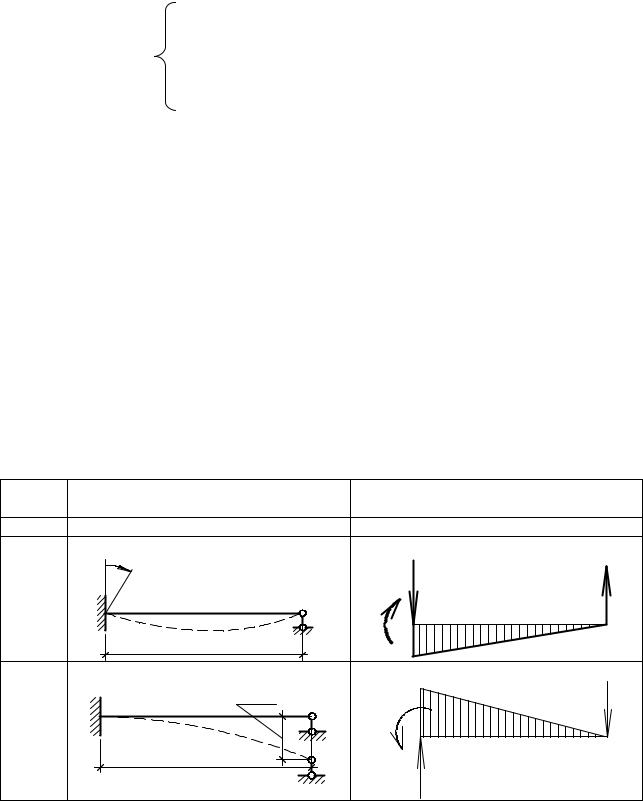
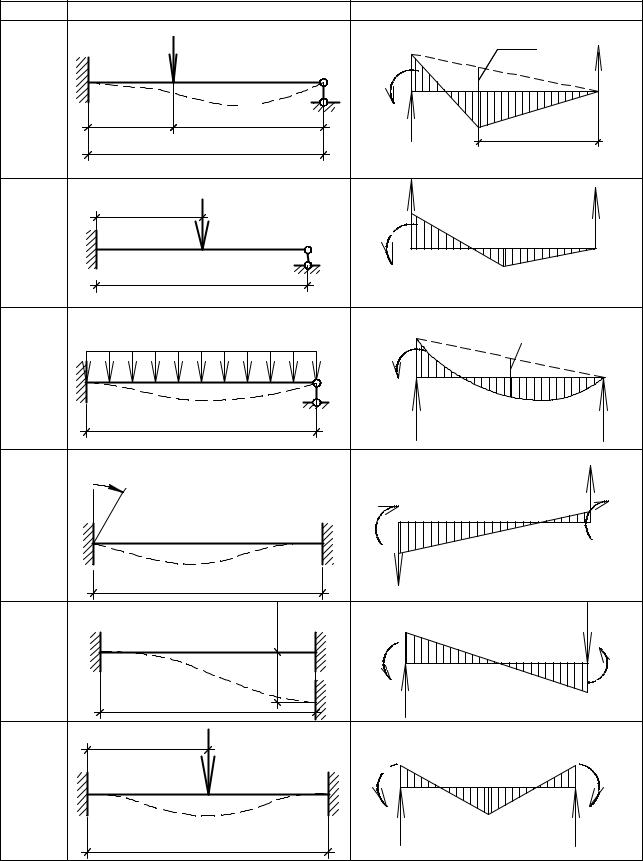
Опорные реакции и моменты в статически неопределимых балках, используемых в контрольной работе для расчета рам методом перемещений приведены в табл. 12 (только от силового и кинематического воздействия).
Таблица 12
Реакции и моменты в статически неопределимых балках для расчета рам методом перемещений
Номер |
Схема |
|
балки |
||
|
||
1 |
2 |
ϕ |
= |
A |
|
|
1 |
1
B
A |
l |
|
|
|
|
A |
∆=1 |
B |
2 |
|
|
|
l |
|
Эпюра моментов и опорные реакции
3
|
R =R = |
3EJ |
M = 3EJ |
||
|
|
l 2 |
A |
l |
|
|
A B |
|
|
||
MA |
R |
|
|
|
R |
|
A |
|
|
|
B |
A |
|
|
|
|
B |
|
|
|
|
|
|
|
R = R = 3EJ |
R |
|||
MA |
|
A |
B |
l 3 |
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
A |
|
M = |
3EJ |
B |
|
|
|
|
||
|
RA |
|
A |
l 2 |
|
|
|
|
|
||
66
|
|
|
|
|
|
|
Продолжение табл. 12 |
||||||
1 |
|
2 |
|
MA =Plv(1-v 2)/2 |
3 |
|
|
|
|
|
|||
|
|
|
|
|
vuPl |
|
|
|
|
||||
A |
P |
|
B |
MA |
|
|
|
|
|
|
|
|
RB |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ul |
vl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RA |
|
|
|
|
vl |
|
|
|
|||
|
|
l |
|
|
|
|
|
|
|
|
|||
|
|
|
RA =Pv(3-v 2)/2 |
|
|
R =Pu 2(3-u)/2 |
|||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
l/2 |
P |
|
RA |
MA = 3Pl |
RA = |
11P |
|
RB = |
5P |
RB |
||
|
|
MA |
|
16 |
|
|
16 |
|
|
16 |
|
||
4 |
|
|
B |
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
A |
l |
|
A |
|
|
|
5Pl |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
q |
|
MA |
MA |
= ql 2 |
|
|
ql 2 |
|
|
|
|
|
|
|
|
|
8 |
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
5 |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|||
A |
|
l |
|
|
|
|
|
|
R = 3ql |
|
|||
|
|
|
R = 5ql |
|
|
|
|
|
|||||
|
|
|
|
|
A |
8 |
|
|
|
|
B |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ϕ |
|
|
|
|
R =R = 6EJ |
|
|
|
RB |
|
|||
A =1 |
|
|
MA |
|
|
|
|
||||||
|
|
|
|
A |
B |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
||
6 |
|
|
|
A |
|
|
|
|
|
|
|
|
MB |
|
|
|
|
|
|
|
|
|
|
|
B |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
RA |
M = 4EJ |
|
|
MB = 2EJ |
|
||||
|
|
l |
|
A |
l |
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
∆=1 |
|
MA |
|
|
RA =RB = 12EJ |
RB |
|||||
|
|
|
|
|
|
|
|
|
l 3 |
B |
|
||
7 |
A |
|
B |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
l |
|
RA |
MA =MB = |
6EJ |
|
|
|
|
MB |
||
|
|
|
|
|
l |
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l/2 |
P |
|
R =R = P |
M =M = Pl |
|
|
||||||
|
|
|
|
A |
B |
2 |
|
A |
B |
8 |
|
|
|
|
|
|
|
MA |
|
|
|
|
|
MB |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
B |
A |
|
|
|
|
|
|
B |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|||
|
l |
RA |
|
Pl |
|
|
|
RB |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
8 |
|
|
|
|
|
||||
|
|
|
67 |
|
|
|
|
|
|
|
|
|
|