

1.Введение в микропроцессорную технику.
1.1. Принцип программного управления объектом.
Цифровые устройства могут быть реализованы на принципе жесткой логической структуры и на принципе программного управления объекта. Система с жесткой логической структурой обеспечивают реализацию наперед заданной функцией. Изменение ф-ии ведет к аппаратной переделке системы. Системы созданные на принципе программного управления объектом умеют запоминающие ус-ва для программ которые задают их функциональный переход к выполнению других фу-ий может быть осуществлен аппаратной переделкой, но и иземенением программы. Что может быть осуществлено пользователем. Достоинства и недостатки второго подхода. Достоинства: 1. универсальность (нет необходимости малосирийных сложных БИС) 2. Возможность реализации фу-ией как аппаратными так и программными средствами. Недост: меньшее быстродествие.
1.2. Структура микропроцессорной системы.
Общие сведения. Микропроцессорная система (МПС) состоит минимум из 3-х обязат частей: микропроцессора, памяти и ус-в ввода вывода. МПС характеризуется архитектурой (структурно-логическая организация). Архитектура включает: 1. структурно-логическую схему; 2. способы обращения ко всем доступным для пользователя Эл-ов; 3. способы представления и формат данных; 4. набор команд или операций; 5. назначение и характеристики используемых управляющих и информационных сигналов. За типов архитектуры различают МПС Фоннеймановской и гарварской архитектурой.
Фоннейманвская архитектура
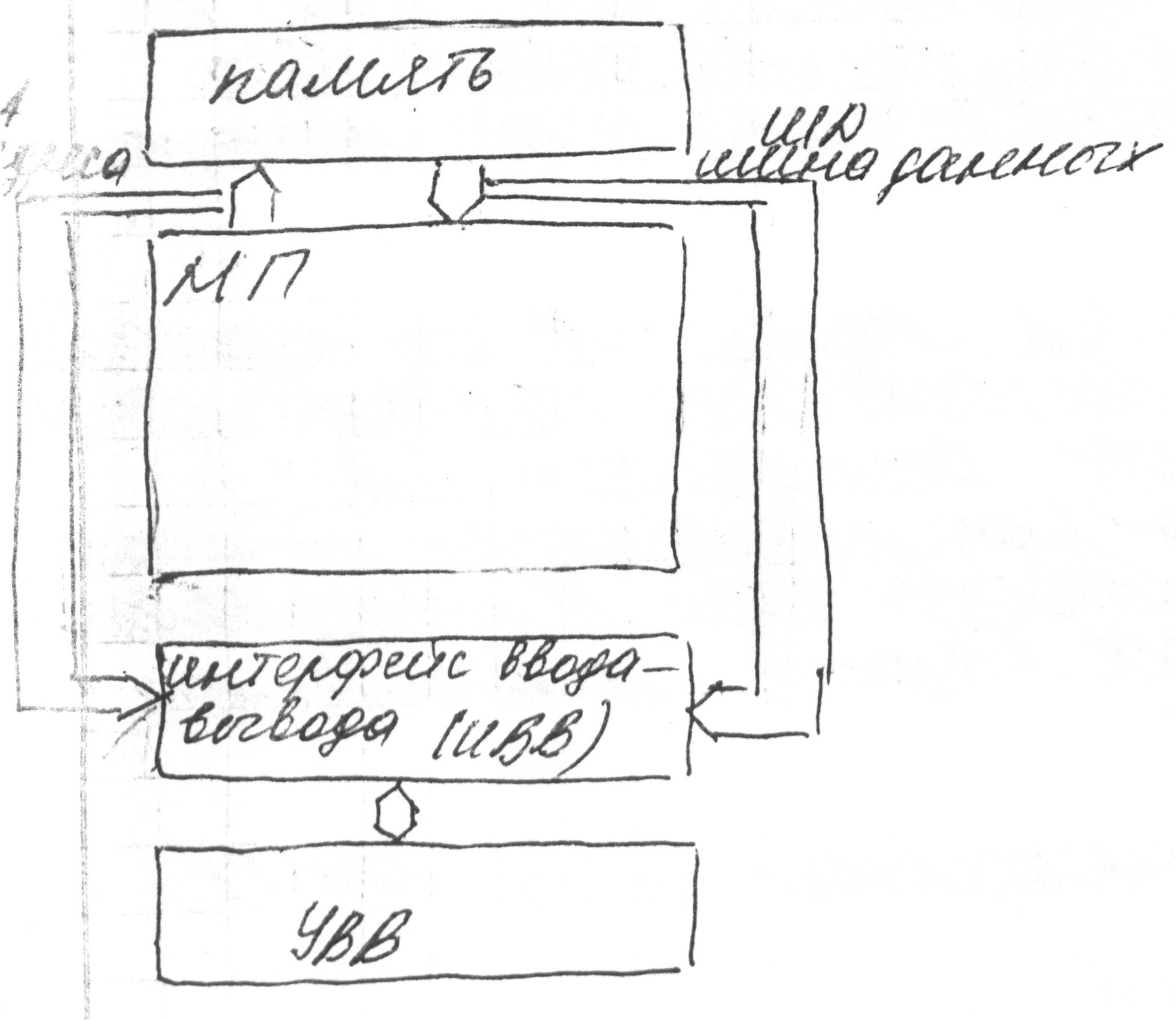
Особеннойсть: эта архитектра имеет общую память в кот содержутся и программы и данные. Доступ к памяти осуществл по одной шине.
Гарварская архитектура.

Особенность: для данной архитектуры память программ и память данных разделены, они имеют отдельные шины.
Краткие сведения об осн частях МПС
Память. Запоминающее ус-во произвольного доступа,т.е. время выборки данных из любой ячейки ЗУ занимает одно и тоже время. Различают: 1. оперативное запоминающее ус-ва (ОЗУ (RAM)) 2. Пост запом ус-во (ПЗУ (ROM)) Упрощенное представление памяти
Интерфейсные ус-ва ввода выдода. Представляют собой спец регистры кот наз портами, эти регистры управляемы. Микропроцессор. Микропроцессор – это программно управляемое ус-во осуществляющее процесс цифр обработки и-ии и управление им, построенное как правило на одной или нескольких БИС.
1.3. Шинная организая МПС. Адресная система
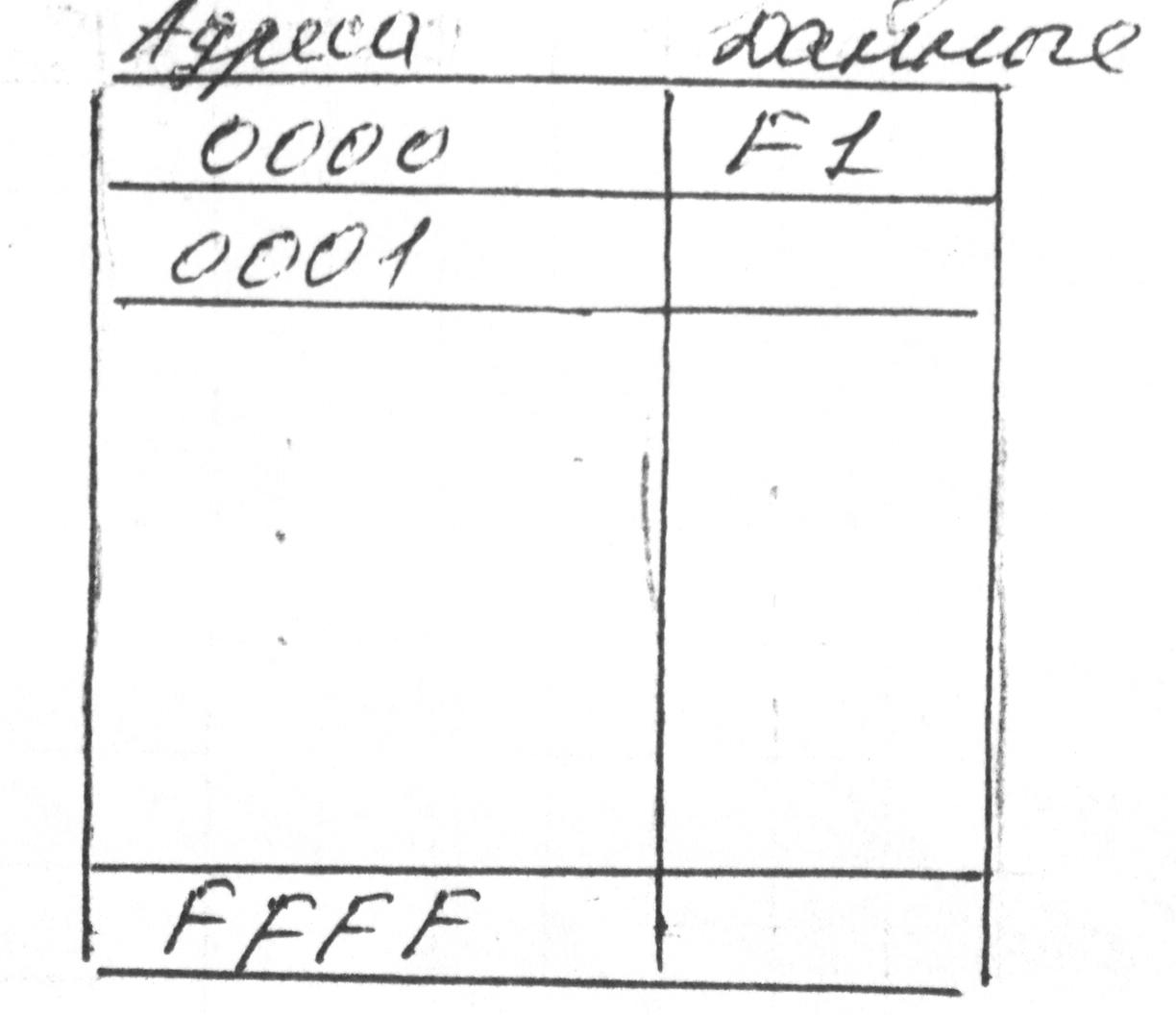
И-ия в МПС передается минимум по трем шинам: Шина адреса (ША, МА, А) Шина данных (ШД, МД, Д) Шина управления (ШУ, МУ, С) Шина адреса – минимальная 16 разрядов, однонаправленная. ШД от 8 и выше, двунаправленная. ШУ от 5 и выше, дву и однонаправленная в целом двунаправленная. С помощью ША организуется адресная система МП. Простейшие из них имеют вид
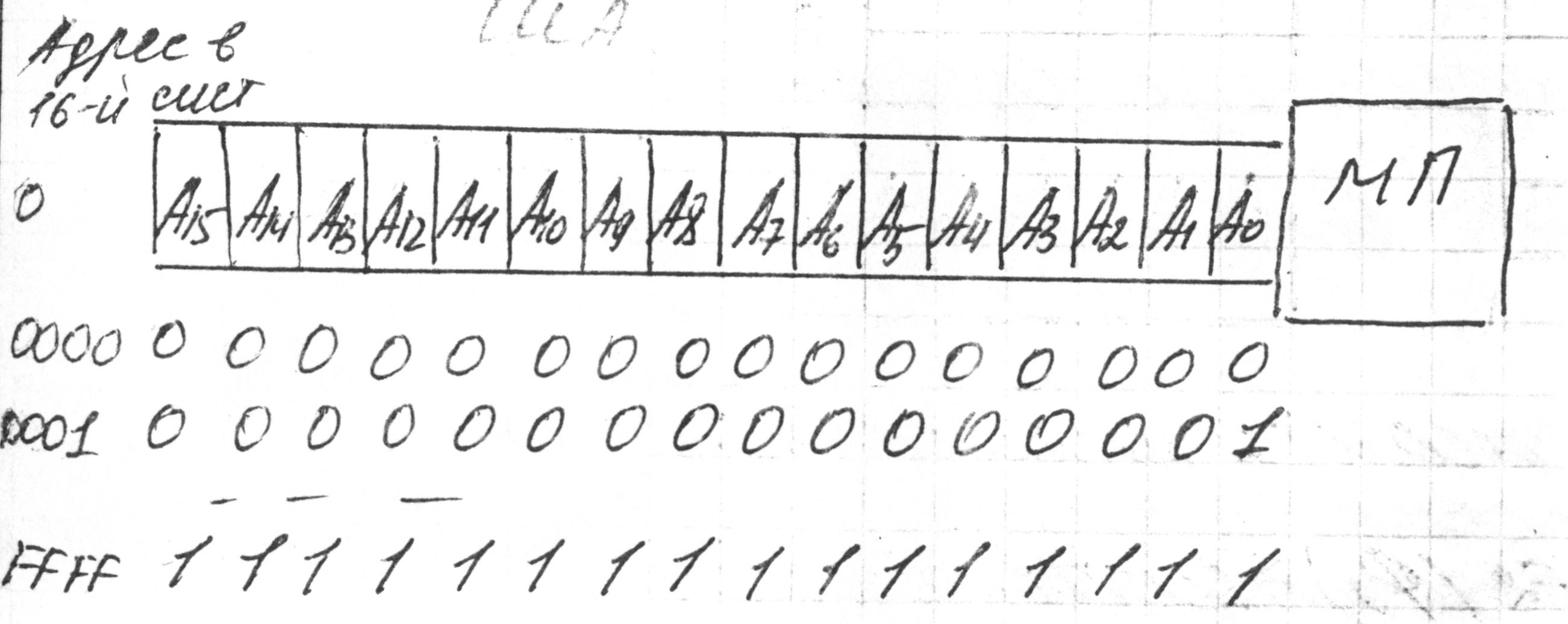
Макс число 216=65536=64К; К=1024
Режимы работы МПС: 1. Режим выполнения программ 2. режим выполнения подпрограмм 3. режим выполнения прерывания. 4. режим прямого доступа к памяти.
1.4. Основные ф-ии микропроцессоров
1. извлечение
Декодирование
Выполнение команд
2. передача данных между EDD и памятью 3. ответы на внешнее прерывание 4. установка сигналов управления и синхронизации всей МП системы.
Общая струткура МП.
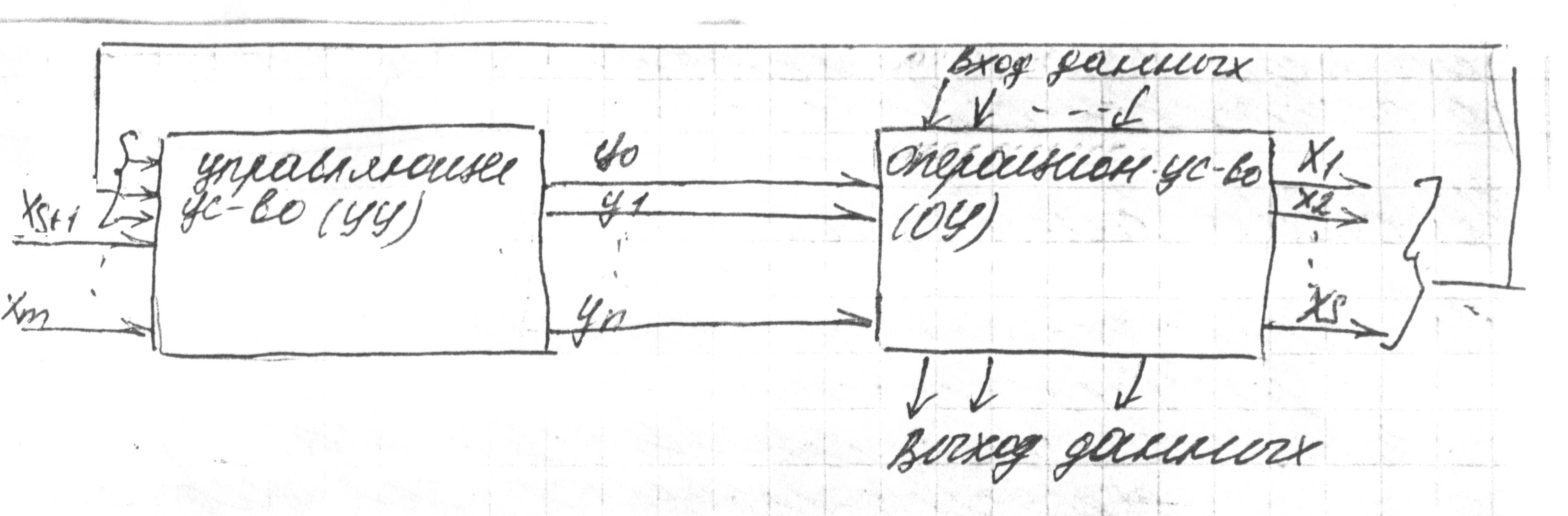
y0, y1, … yn – управляющие сигналы
ОУ выполняет все цифр операции в соответствии с заданной программой. УУ – координирует действие узлов ОУ ( вырабатывает управляющие сигналы для узлов ОУ). Процесс функц-ния ОУ распадается на последовательность элементарных действий в его узлах (напр установка регистра в некот сост R<<0). Каждое такое элементарное действие выполняемое в одном из узлов ОУ наз микрооперацией. В опреден тактовые периоды может одновременно выполнятся несколько микроопераций в разных узлах ОУ, это наз микрокомандой. Весь набор микрокоманд предназнач для решения задачи наз Микропрограммой. На рис y0, y1, … yn – это управляющие сигналы, каждый из кот выполняет микрооперации, все вместе выполняют микрокоманды. Сигналы х1…хs определяют сост узлов ОУ. Сигналы хs+1…xm явл внешними. Кот позволяют учитывать сост внешних по отношению к МП ус-в.