

сопроматчасть1
.pdfПри малых углах поворота сечений Θ tgΘ ≈ Θ ≈ ddυz = υ′ , а изогнутая
ось балки или упругая линия балки может быть представлена приближенным дифференциальным уравнением
EI X υ′′ = M , |
|
|
(6.1) |
′′ |
d 2 |
υ |
− производная второго порядка от |
|
|
||
где EIx − жесткость балки; υ = |
dz |
2 |
|
|
|
прогиба υ; М – изгибающий момент на участке.
Интегрируя (6.1) дважды можно получить выражения углов поворота
и прогибов
EIxυ′ = EIxΘ = ò Mdz + C1, EIxυ = òdzò Mdz + C1z + C2 ,
которые после определения постоянных интегрирования C1 и C2 из условий закрепления балки, могут быть использованы для определения υ и Θ .
6.2. Метод начальных параметров
Очевидно, что для балки с n участками необходимо определить 2n постоянных интегрирования и их вычисление становиться громоздким.
Однако путем искусственных приемов составления и интегрирования дифференциального уравнения упругой линии балки можно добиться равенства постоянных на всех участках и свести число постоянных к двум.
К таким приемам относятся:
1.Начало координат необходимо выбирать в крайней левой точке балки и делать его общим для всех участков.
2.Выражение для изгибающего момента M(z) составлять, вычисляя моменты сил, расположенных слева от рассматриваемого сечения.
3.При включении в уравнение внешнего сосредоточенного момента
Мего нужно умножить на множитель (z−a)0 равный единице. Здесь a – абсцисса точки, где приложен момент М.
4.В случае обрыва распределенной нагрузки (например, в сечении
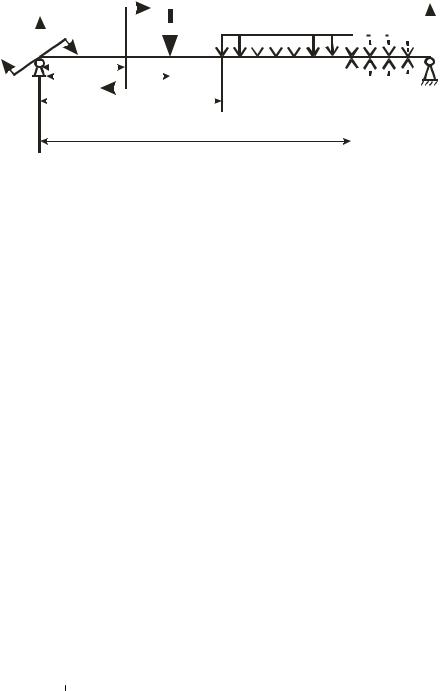
z = d, (рис. 6.2)) ее продлевают до конца балки, а для восстановления действительных грузовых условий вводят «компенсирующую» нагрузку обратного направления. «Продленную» и «компенсирующую» нагрузки принято показывать штриховыми линиями.
5. Интегрировать уравнение на всех участках следует, не раскрывая скобки.
131
R1=P0 |
|
|
|
|
|
M |
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R 2 |
|||||||||
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
M |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
a |
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.2.
На рис. 6.2 изображена балка, загруженная произвольной нагрузкой. Запишем для нее дифференциальное уравнение, используя перечисленные приемы.
EIxυ′′ = M0 + P0 z |
|
| + M (z − a)О | − P(z − b) | |
− q |
(z − c)2 |
| |
+ q |
(z − d )2 |
| |
(6.2) |
|||
|
||||||||||||
|
||||||||||||
2 |
2 |
|||||||||||
|
|
I |
II |
III |
|
IV |
|
V |
|
|||
Вертикальные линии с цифрами I, II, III, IV, V ограничивают моменты на первом, втором, третьем, четвертом и пятом участках балки.
Моменты от каждого вида нагрузки записывают в порядке их расположения на балке.
Интегрируя уравнение (6.2) получим уравнение углов поворота:
EIxυ′ = EIхΘ = EIхΘ0 + M0 z + P0 |
z2 |
|+ M (z − a) | |
− P |
(z − b)2 |
| |
− q |
(z − c)3 |
| |
+ q |
(z − d )3 |
| |
(6.3) |
||
2 |
2 |
6 |
6 |
|||||||||||
|
I |
II |
|
III |
|
IV |
|
V |
|
|||||
где Θ0 – постоянная интегрирования, физический смысл которой – угол поворота в начале координат, т.е. при z=0.
Интегрируя уравнение (6.3) получим уравнение прогибов, называемое универсальным уравнением упругой линии балки.
EIxυ =EIxυ0 +EIxΘ0z+M0 |
z2 |
+P0 |
z3 |
|+M |
(z−a)2 |
| |
−P |
(z−b)3 |
| |
−q |
(z−c)4 |
| |
+q |
(z−d)4 |
| |
(6.4) |
2 |
|
2 |
|
24 |
24 |
|||||||||||
|
|
6 I |
II |
6 |
III |
|
IV |
|
V |
|||||||
,
где υ0 – постоянная интегрирования, физической смысл которой – прогиб в начале координат.
υ0, Θ0, M0, P0 называются начальными параметрами. υ0 и Θ0 определяют из условий закрепления балки, M0 и P0 – момент и сила в
начале координат.
132

6.3. Интеграл Мора
На практике использовать аппарат дифференциальных уравнений для произвольной стержневой системы довольно громоздко. Кроме того, в
большинстве случаев требуется вычислить только перемещения в конкретных точках конструкции по фиксированным направлениям. Эту задачу успешно решает метод немецкого ученого Мора.
Линейное или угловое перемещение сечения стержневой системы подверженной изгибу согласно этому методу может быть определено следующим интегралом:
|
|
|
|
|
|
n |
M xi × M xi |
|
|
||
D = åò |
dz , |
(6.5) |
|||
|
|||||
i=1 l |
EJxi |
|
|||
i |
|
|
|
|
|
где n – число участков упругой системы; Mxi-изгибающий момент на i-м участке от внешней нагрузки; M xi -изгибающий момент на i-м участке от
силы равной безразмерной единице, приложенной в точку определения линейного перемещения или от момента равного единице, приложенного в точку определения углового перемещения; li – длина i-го участка; Е- модуль продольной упругости; Jxi-осевой момент инерции сечения на i-м участке.
Для определения перемещения методом Мора необходимо проделать следующее:
1.Определить реакции опор от внешней нагрузки.
2.Разбить систему на участки. При разбиении системы на участки следует помнить, что точка определения перемещения рассматривается как граница участка.
3.На каждом участке определить выражения изгибающих моментов от внешней нагрузки Mxi.
4.Составить схему единичного нагружения, освободив систему от
внешней нагрузки а в точку определения перемещения приложив единичную силу, если вычисляется линейное перемещение или единичный момент, если вычисляется угловое перемещение, и для тех же участков, что и для Mxi определить выражения изгибающих моментов от единичной
нагрузки M xi . Составить интеграл Мора и вычислить искомое
перемещение. Знак плюс полученного результата указывает на совпадение направления единичного усилия и перемещения, знак минус
свидетельствует о противоположном направлении единичного усилия и перемещения.
133

6.4. Способ Верещагина
А.Н. Верещагин показал, что интеграл Мора, имеющий вид
J = òM i M i dz
где M i − выражение грузового силового фактора, представленное линейной или параболической функцией, а Mi − выражение единичного силового
фактора, представленное линейной функцией, проще вычислять графоаналитическим способом. В этом случае
J = òM i M i dz = ωi M ci ,
где ωi − площадь эпюры грузового силового фактора, M ci − значение
единичного силового фактора под центром тяжести ωi .
Тогда в упругих системах, подверженных изгибу
перемещение определяется по формуле
n |
ω |
|
|
|
M |
|
(6.6) |
||
= å |
i |
ci |
||
i =1 |
EIxi |
|
||
где n – число площадей, на которые разбита эпюра моментов от нагрузки; ωi − площади, на которые разбита грузовая эпюра; M ci − значение единичного момента под центром тяжести ωi.
6.5. Пример определения перемещений в балке
Для заданной балки, схема которой с указанными на ней численными значениями нагрузок и размеров приведена на рис. 6.3, а,
подобрать стандартный двутавр из условия прочности по нормальным напряжениям и, определив углы поворота и прогибы на конце консоли в середине пролета различными методами, провести проверку на жесткость. Если условие жесткости не удовлетворяется, то подобрать новое сечение из условия жесткости.
134

Решение:
Определяем реакции связей:
åМ А = P × 6 - R2 × 4 - q × 4 × 2 + M 0 = 0,
R2 |
= |
6P + M 0 |
- q ×8 |
= |
120 +16 |
- 80 |
|
=14кН; |
||||
4 |
|
|
4 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
åM B = P × 2 + q × 4 × 2 + M0 - R1 × 4 = 0, |
||||||||||||
R = |
P ¸ 2 + q ×8 + M 0 |
|
= |
40 + 80 +16 |
= 34кН. |
|||||||
|
|
|||||||||||
1 |
|
|
4 |
|
|
|
4 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
Проверка реакций:
åPiy = R1 - q × 4 - R2 + P = 34 - 40 -14 + 20 = 0 .
|
R 1=34 кН |
|
q =10 |
кН/м |
z2 |
|||||||||||
|
|
|
|
|||||||||||||
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
M 0=z161 |
кН/мD |
|
|
|
|
BR =14 кН |
|
|
P=20 кН |
||||||
|
|
|
|
|
|
|||||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
4м |
|
|
|
|
|
2 м |
|
|
|
||||
QН =34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
Qн |
|
|
|
|
C |
|
|
|
|
|
|
|
|
||
|
=3,4 м |
6 |
|
|
|
|
Q, кН |
|||||||||
|
z с = q |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
16
в M, кНм
M, кНм
32  40
40
41,8
Рис. 6.3.
Строим эпюры поперечных сил и изгибающих моментов (см. рис. 6.3, б, в):
135
1-й участок 0 < Z1 < 4
Q1 = R1 - qz1; Q1 (0) = R1 = 34 кН; Q1(4)= R1 - q × 4 = 34 - 40 = -6 кН ;
М |
|
= -М |
|
+ R × z - q |
z2 |
; М |
|
(0)= −М |
|
= −16 кНм ; |
||||||||||
1 |
0 |
|
1 |
1 |
0 |
|||||||||||||||
|
|
|||||||||||||||||||
|
|
1 |
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
||
|
|
M1(4) = -16 + 34 × 4 -10 |
|
= 40 кНм; |
||||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
Qн |
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
zс = |
= |
|
34 |
= 3,4 м; |
|
|
||||||||||
|
|
|
|
|
10 |
|
|
|||||||||||||
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
||
М1(zc )= M1 (3,4)= -16 + 34×3,4 -10 |
3,42 |
= 41,8кНм |
||||||||||||||||||
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2 |
|
|
||
|
|
М1(2)= -16 + 34 × 2 -10 |
= 3 кНм; |
|||||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
2-й участок 0 < z2 < 2 |
|
|
||||||||||||||
|
|
|
|
|
Q2 = −P = −20кН; |
|
|
|||||||||||||
|
|
М 2 = Pz2 ; |
М2 (0)= 0; М 2 (2)= 40 кНм. |
|||||||||||||||||
Подбираем двутавровое сечение из условия прочности по нормальным напряжениям:
|
σ |
max |
|
= |
|
|
M |
|
max |
£ R , |
|
M |
|
max |
= 41,8 кНм, R = 210 МПа |
|
|
|
|
||||||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Wx |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
для стали Ст. 3.
Wx ³ |
|
|
M |
|
max |
= |
41,8 ×103 |
= 0,199×10−3 м3 =199 см3. |
|
|
|||||||
|
|
R |
210 ×106 |
|||||
|
|
|
|
|
||||
Из сортамента ГОСТ 8239-89 ближайший номер двутавра с Wx=203
см3. №20а и Ix=2030 см4.
Определяем углы поворота и прогибы на конце консоли и в середине пролета методом начальных параметров (рис. 6.4).
136

R1 =34 кН=P0
|
|
|
z |
|
|
|
q =10 кН/м |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M 0 |
=16 кН |
D |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P=20 кН |
|||
|
|
|
|
|
|
4 м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 м |
|
|
|
|
|
|
|
|
|
|
|
q |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R 2 =14 кН
z
Рис. 6.4
Записываем дифференциальное уравнение упругой линии балки, соблюдая условия, при которых постоянных интегрирования будет только
две и по смыслу они будут равны углу поворота и прогибу в начале балки (начало координаты z).
|
EIxυ′′ = −M 0 + R1z − q |
z2 |
|
|− R2 (z − 4)+ q (z − 4)2 |
| |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
2 |
|
I |
|
|
|
|
|
2 |
|
II |
|
|
|
||||
Интегрируем уравнение дважды |
|
|
|
|
|
|
|
|
|
||||||||||||||
EIxυ′ = EIxΘ = EIxΘ0 − M0 z + R1 |
z2 |
|
+ q |
z3 |
| − R2 |
(z − 4)2 |
+ q |
(z − 4)3 |
| |
|
(6.7) |
||||||||||||
|
|
|
|
|
|
2 |
|
|
|||||||||||||||
|
2 |
|
|
|
|
6 |
|
I |
|
|
|
|
6 |
II |
|
|
|||||||
EIxυ = EIxυ0 |
+ EIxΘ0 z − M0 |
z2 |
+ R1 |
|
z3 |
− q |
z4 |
|− R2 |
(z − 4)3 |
+ q (z − 4)4 |
| |
(6.8) |
|||||||||||
|
|
6 |
|
|
6 |
|
|||||||||||||||||
|
2 |
|
|
|
|
|
|
|
24 I |
|
|
|
|
24 |
|
II |
|
||||||
Определяем EIxQ0 и EIxυ0 из условий закрепления балки:
при z = 0 |
EIxυ(0) = 0 = EIxυ0 |
; |
|
|
|
|
|
|
|
|
|
|
|
при z = 4 м |
EI xυ(4) = EIxQ0 ×4 - M 0 |
4 |
2 + R1 |
43 - q |
44 |
= 0 , |
|||||||
|
24 |
||||||||||||
откуда |
|
|
|
|
2 |
|
|
6 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EIxQ0 × 4 =16 |
16 |
- 34 |
64 |
+10 |
256 |
|
= -128. |
|||||
|
|
6 |
|
||||||||||
|
2 |
|
|
|
|
|
2 |
|
|
|
|||
|
EIxQ0 = - |
128 |
= -32 |
кНм2. |
|
||||||||
|
|
|
|||||||||||
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
137
Таким образом, уравнение углов поворота окончательно запишется
так:
EIxQ = -32 -16× z +17× z2 -1,67× z3 | - 7×(z - 4)2 +1,67 |
×(z - 4)3 | |
|
(6.9) |
|
I |
|
II |
|
|
Уравнение прогибов: |
|
|
|
|
EI xυ = -32 × z - 8× z2 + 5,67 × z3 - 0,417 × z4 | - 2,33×(z - 4)3 + 0,417 ×(z - 4)4 |
| |
(6.10) |
||
I |
|
|
II |
|
Далее будем определять ЕIxv и |
ЕIxΘ , |
называя их для краткости |
||
соответственно прогиб и угол поворота. Вычисляем угол поворота в середине пролета при z = 2 м (точка D), используя только часть уравнения для первого участка, т.е. до вертикальной линии I.
EIxQD (2) = -32 -16 × 2 +172 -1,67 × 23 = 9,36 кНм2.
Угол поворота на конце консоли, т.е. при z = 6 м (точка Е), определим, используя всё уравнение (6.9):
EIxQЕ = -32 -16 × 6 +17 × 62 -1,67 × 63 - 7 × 22 + 1,67 × 23 = - 32 - 96 + 612 - 360,72 - 28 +13,36 =108,64 кНм2.
Вычисляем прогиб в точке D:
EIxυD =-32×2-8×22 +5,67×23 -0,417×24 -64-32+45,36-6,672=-57,3
|
|
кНм3, |
|
|
|
|
υD = |
- 57,312 ×103 |
- 57,3 ×10 |
3 |
= 0,0141 м. |
||
= |
|
|
|
|||
2 ×1011 × |
2030 ×10−8 |
|||||
|
EI x |
|
||||
Вычисляем прогиб в точке Е при z = 6 м:
EI xυЕ = -32 × 6 - 8 × 62 + 5,67 × 63 - 0,417 × 64 - 2,33 × 23 + 0,417 × 24 = - 192 - 288 + 1224,72 - 540,432 - 18,64 + 6,672 = 192,32 кНм 3 ,
υE = |
|
192,32 ×103 |
= 0,0474 м . |
|
×1011 × 2030×10−8 |
||
2 |
|
||
138

Проверяем жесткость балки на консоли и в средине пролета. Условие жесткости на консоли балки записывается так:
υE ≤ [f ]к = 400lк ,
где [fк ] допустимый прогиб на консоли; lк – длина консоли, м.
0,0474 м > [f ]к = 4002 = 0,005 м .
Условие жесткости не удовлетворяется, поэтому подбираем сечение
из условия жесткости
|
υE |
= |
192,32 ×103 |
£ 0,005м, |
|
|
2 ×1011 Ix |
||||
|
|
|
|
||
Ix ³ |
192,32×103 |
=19232×10−8 м4 =19232см4 |
|||
|
|||||
|
2×1011 ×0,005 |
|
|||
Этому моменту |
|
инерции |
соответствует двутавр № 45 с |
||
Ix = 27696м4.
Проверяем жесткость балки в середине пролета:
υD ≤ [f ]пр ,
где [f ]пр − допускаемый прогиб в полете,
[f ]пр = 300lпр = 3004 = 0,0133 м,
прогиб в пролете для двутавра № 45
uD = |
57,312 ×103 |
= |
57,312 ×103 |
= 0,001м. |
|
2 ×10¢¢× 27696 ×10−8 |
|||
|
EIx |
|
||
υD < [f ]пр − условие жесткости в пролете удовлетворяется.
139

Определение прогибов и углов поворота методом Мора
1. Определяем угол поворота сечения в точке D.
а) Разбиваем балку на участки с учетом того, что точка определения перемещения является границей участков (рис. 6.5, а): 0 ≤ z1 ≤ 2 м;
0 ≤ z2 ≤ 2 м; 0 ≤ z3 ≤ 2 м.
б) Записываем выражения моментов на каждом участке от нагрузки, приводя их к простому виду.
М |
|
= R z - M |
|
- q |
z2 |
= -16 +34z -5z2 |
|
|
|
|
|
|
|
|
|||||||
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
1 |
1 |
|
|
2 |
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M |
2 |
= P(2 + z |
2 |
)- R × z |
2 |
- q |
z22 |
= 40 + 20z |
2 |
-14z |
2 |
-10 |
z22 |
= 40 + 6z |
2 |
-5z2 |
|||||
|
|
||||||||||||||||||||
|
|
|
|
|
2 |
2 |
|
|
|
2 |
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M3 = Pz3 = 20z3
в) В точку D приложим момент равный единице, определим реакции связей (рис. 6.5, б) и для тех же участков запишем выражения моментов.
|
|
= |
|
× z = |
1 |
z ; |
|
|
= - |
|
z |
|
= - |
1 |
z |
|
|
|
= 0 |
М |
|
R |
M |
|
R |
|
|
M |
3 |
||||||||||
|
4 |
|
|
4 |
|
||||||||||||||
|
1 |
1 |
1 |
1 |
|
2 |
2 |
|
2 |
|
|
2 |
|
|
|||||
Рис. 6.5.
140