

2.4. Пример решения задачи т2
Ползун
D
механизма, показанного на рис. 33,
совершает возвратно-поступательное
движение и нагружен на рабочем ходу
постоянной силой Fc
полезного сопротивления. На холостом
ходу полезное сопротивление
отсутствует, но продолжают действовать
вредные. Учитывая действие трения в
кинематических парах, по коэффициенту
полезного действия
![]() механизма произвести определение
параметров, согласно требований задачи
Т2.
механизма произвести определение
параметров, согласно требований задачи
Т2.
Исходные данные:
Fc=10
кН,
![]() =60
рад/с,
=60
рад/с,![]() =0,7.
Размеры звеньев, м:ОА=0,1;
АВ=0,2;
ВО1=0,15;
СD=0,25;
OO1=0,18;
O1C=0,08.
=0,7.
Размеры звеньев, м:ОА=0,1;
АВ=0,2;
ВО1=0,15;
СD=0,25;
OO1=0,18;
O1C=0,08.
Решение
Определяем крайние
положения механизма, соответствующие
началу рабочего и холостого хода. Крайнее
левое положение ползун D
занимает в момент, когда звенья АО
и АВ
складываются (положение ОА1В1С1D1).
Крайнее правое положение он достигает
при вытягивании звеньев ОА
и АВ
в одну линию (положение ОА2В2С2D2).
Перемещение ведущего звена из положения
ОА1
в положение
ОА2
с поворотом
на угол
![]() по направлению
по направлению![]() – есть рабочий ход, а из положения ОА2
в ОА1
с поворотом на угол
– есть рабочий ход, а из положения ОА2
в ОА1
с поворотом на угол
![]() – холостой ход. За один ход ползун
перемещается на величинуs.
Для решения задачи по всем пунктам
необходимо определить значения
– холостой ход. За один ход ползун
перемещается на величинуs.
Для решения задачи по всем пунктам
необходимо определить значения
![]() ,
,![]() , s.
, s.
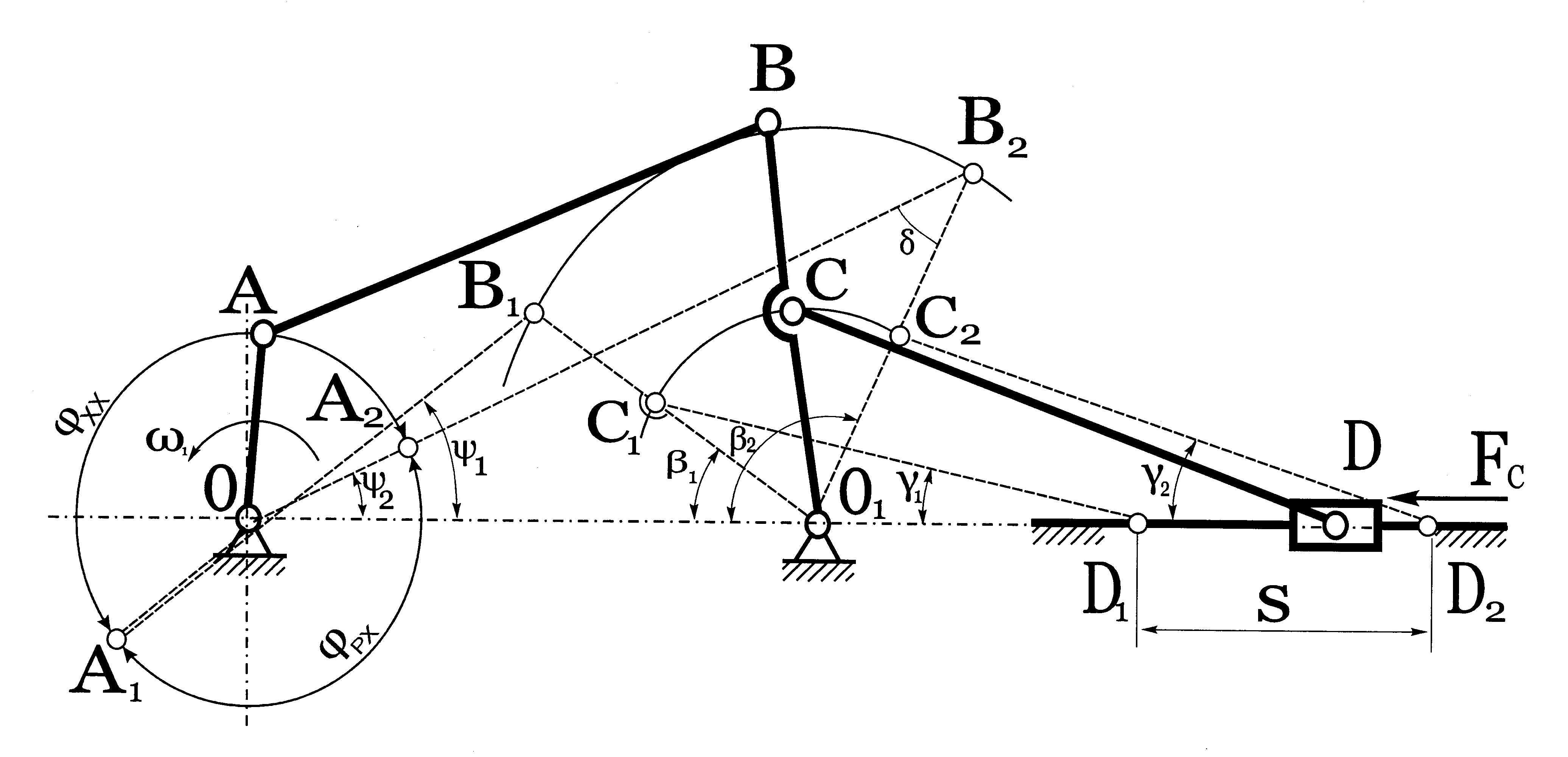
Рис. 33
Наиболее простой путь установления данных параметров – графическое построение механизма в масштабе в крайних его положениях с последующим измерением образующихся размеров с чертежа. Пример такого построения показан на рис. 33. Однако этот метод приближенный и его точность зависит от выбранного масштаба. Аналитический метод исключает этот недостаток. Рассмотрим на примере подробнее.
Определяем углы
![]() и
и![]() ,
которые фиксируют положение звена АО
в начале и конце рабочего хода. Из
,
которые фиксируют положение звена АО
в начале и конце рабочего хода. Из![]() ,
гдеОВ1=(АВ-ОА)=0,1;
ОО1=0,1;
О1В1=0,15
по теореме
косинусов получаем
,
гдеОВ1=(АВ-ОА)=0,1;
ОО1=0,1;
О1В1=0,15
по теореме
косинусов получаем
![]() .
.
Отсюда
![]() .
.
Из
![]() аналогично определяем угол
аналогично определяем угол![]() .
ЕслиОВ2=(АВ+ОА),
то
.
ЕслиОВ2=(АВ+ОА),
то
![]() .
.
Следовательно
(рис. 33),
![]()
![]() .
.
Для определения
хода ползуна s
рассмотрим звенья О1С
и СD
в крайних положениях с образованием
![]() и
и![]() ,
зафиксированных углами
,
зафиксированных углами![]() и
и![]() , и углами
, и углами![]() и
и![]() .
В треугольнике
.
В треугольнике![]() по теореме синусов определяем угол
по теореме синусов определяем угол![]() .
Из соотношения
.
Из соотношения![]() получаем
получаем![]() =33,750.
Аналогично для треугольника
=33,750.
Аналогично для треугольника
![]() получаем
получаем![]() ,
откуда следует
,
откуда следует![]() и далее
и далее![]() .
Таким образом, коромыслоО1В
в крайних положениях фиксируется углами
.
Таким образом, коромыслоО1В
в крайних положениях фиксируется углами
![]() и
и![]() .
.
Крайние положения
шатуна СD
определяются треугольниками
![]() и
и![]() ,
из которых так же по теореме синусов
находим
,
из которых так же по теореме синусов
находим![]() и
и![]() .
.
Ход ползуна s
согласно
рис. 33 вычисляется как
![]() ,
где
,
где
![]() м.
м.
Следовательно,
![]() м.
м.
Итак, для заданного механизма были получены исходные данные для дальнейших расчетов по п.1 … п.4 в соответствии с требованиями задачи Т2:
– угол поворота
ведущего звена (рабочий ход)
![]() рад.;
рад.;
– для холостого
хода –
![]() рад.;
рад.;
– ход ползуна – s =0,115 м.
Далее расчет проводим согласно пунктам задания Т2.
1. Определяем движущий момент Тд, постоянный по величине, который нужно приложить к ведущему звену при установившемся движении с циклом, состоящим из рабочего и холостого ходов.
Коэффициент
полезного действия (к.п.д.) определяется
отношением работы (Апс)
сил полезного сопротивления к затраченной
работе (Азатр)
или
![]() .
Работу сил полезного сопротивления
находим как
.
Работу сил полезного сопротивления
находим как![]() ,
затраченную работу -
,
затраченную работу -![]() ,
а за цикл -
,
а за цикл -![]() .
Следовательно, из этих зависимостей
получаем
.
Следовательно, из этих зависимостей
получаем
![]() кНм,
кНм,
Азатр=1,64 кДж,
Апс=1,15 кДж.
2. Для
определения работы сил вредного
сопротивления на рабочем (Авс(рх))
и холостом (Авс(хх))
ходах строим диаграмму зависимости
приведенных средних момента (Т)
за один цикл работы механизма, т.е.
![]() .
.
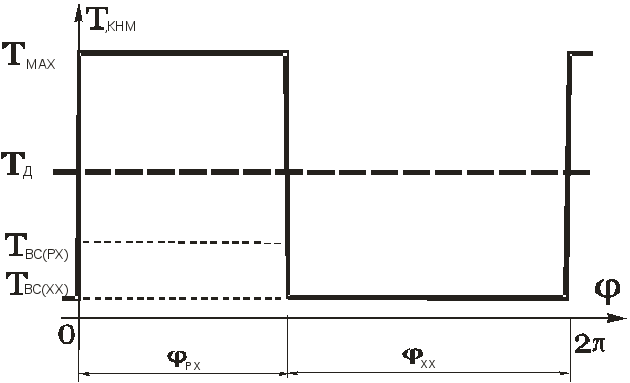
Рис. 34
Определяем работу
сил вредных сопротивлений (сил трения)
![]() за полный цикл работы механизма
за полный цикл работы механизма
![]() кДж.
кДж.
В свою очередь Авс складывается из работ сил сопротивления за рабочей ход – Авс(рх) и холостой ход – Авс(хх)
Авс= Авс(рх)+ Авс(хх)
или через моменты сил сопротивления, действующих на рабочем ходу – Твс(рх) и холостом ходу – Твс(хх)
![]() .
.
Учитывая (согласно условию), что на рабочем ходу силы сопротивления в три раза больше, чем на холостом, получим
![]()
![]() .
.
Отсюда
![]() кНм,
кНм,
![]() кНм,
кНм,
![]() кДж,
кДж,
![]() кДж.
кДж.
3. Определяем изменение кинетической энергии механизма за время рабочего хода. Согласно теореме об изменении кинетической энергии механических систем
![]() ,
,
где
![]() – изменение кинетической энергии за
период рабочего хода;
– изменение кинетической энергии за
период рабочего хода;![]() ,
,![]() – кинетическая энергия механизма в
начале и в конце рабочего хода
соответственно;
– кинетическая энергия механизма в
начале и в конце рабочего хода
соответственно;![]() – сумма работ внешних и внутренних сил,
которая складывается в данном случае
из работ сил полезного сопротивлении
– сумма работ внешних и внутренних сил,
которая складывается в данном случае
из работ сил полезного сопротивлении![]() и сил вредного сопротивления
и сил вредного сопротивления![]() .
Таким образом,
.
Таким образом,
![]() кДж.
кДж.
Аналогично
устанавливается изменение кинетической
энергии при холостом ходе
![]() кДж.
кДж.
4. Мощность, требуемая
от привода при вращении входного звена
ОА
со средней скоростью
![]() ,
определяется как
,
определяется как
![]() кВт.
кВт.
Для определения
средней мощности полезного сопротивления
найдем приведенный к ведущему звену
момент сил полезного сопротивления
![]()
![]() кНм.
кНм.
Тогда средняя мощность полезного сопротивления за цикл составит
![]() кВт.
кВт.
Отношение
![]() учитывает продолжительность действия
момента
учитывает продолжительность действия
момента![]() за цикл. Средняя мощность сил вредного
сопротивления определится как
за цикл. Средняя мощность сил вредного
сопротивления определится как![]() кВт.
кВт.
Достоверность
полученных результатов можно проверить,
определив к.п.д. механизьма –
![]()
![]() ,
,
что соответствует первоначальному условию задачи.