

Подготовка прибора к работе
1. Необходимо подключить прибор к источнику питания, которым может быть аккумулятор, стабилизированный выпрямитель постоянного тока или специальный источник питания «АГАТ».
2. Перед включением все кнопки прибора должны быть в отжатом положении. Кабели прибора подсоединить к разъемам, расположенным на задней крышке усилителя.
3. Подсоединить датчики, расположенные на объекте исследования, к соответствующим кабелям прибора. При использовании полумостовой схемы подключения датчиков использовать специальный переходник НП 20-1.
4. Установить необходимое напряжение питания прибора и нажать кнопку «Вкл.», в результате чего должна загореться лампа зеленого цвета.
5. Для проверки балансировки измерительного моста необходимо потенциометром « ↔ » установить стрелку в положение «0». Повышенная чувствительность прибора достигается нажатием кнопки «ТОЧНО».
6. Подключив питание к датчикам с помощью кнопки «ПД», производится первичная балансировка измерительного моста (полумоста) потенциометром «Б». После выбора режима работы производится окончательная балансировка измерительной схемы при нажатой кнопке «ТОЧНО». При этом стрелка не должна отклоняться более чем на половину деления шкалы прибора.
7. Необходимо производить периодическую проверку балансировки измерительной схемы.
Порядок проведения измерений
Тензоусилитель предназначен для измерения сил, деформаций, моментов вращения, давлений гидравлических систем и других процессов.
В соответствии с чувствительностью применяемых датчиков и схемой их соединения выбирают напряжение питания (4,5 или 9 В) и тип гальванометра, указанный в техническом паспорте прибора. При ненагруженном датчике включить масштабный сигнал кнопкой «М» (рис. 6).
Рабочий
сигнал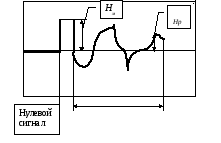
Рис. 6. Примерная рабочая осциллограмма при измерении сил
или моментов вращения
Изменяя
чувствительность прибора кнопкой «
![]() » , установить начальную ординату в
пределах 35—45 мм.
» , установить начальную ординату в
пределах 35—45 мм.
Измерения проводить в следующей последовательности:
— произвести запись «нулевой» линии датчика с помощью осциллографа;
— включить масштабный сигнал «М» и произвести запись на осциллографе;
— отключить масштабный сигнал;
— подать нагрузку на исследуемый объект и произвести запись осциллограммы, примерный вид которой приведен на рисунке 6.
Определение величины измеряемого параметра в определенный момент времени σt производится по формуле:
σt = σм ∙ Hр / Hм ,
где σм — масштабное значение измеряемого параметра в натуральных единицах;
Hр и Hм -— рабочее и масштабное значение ординаты, мм.
Пример. При нагружении механического домкрата грузоподъемностью 3000 кг в процессе испытаний были получены следующие значения ординат: Hм = 50 мм, Hр = 35 мм. Величина приложенного напряжения составит:
σt = 3000 ∙ 35 / 50 = 2100 кг.
3. Исполнительные и регистрирующие устройства для управления процессами
3.1. Исполнительные механизмы
Исполнительные устройства (механизмы), или сервомоторы, получают сигнал от усилителя и приводят в действие регулирующий орган. Базовый принцип классификации сервомоторов — вид энергоносителя, в зависимости от которого они подразделяются на гидравлические, пневматические, электрические и комбинированые.
По характеру перемещения рабочего органа бывают сервомоторы непрерывного и дискретного действия (открыто — закрыто), а также поступательного и вращательного движения.
Основными характеристиками сервомоторов являются: коэффициент усиления по мощности, скорость (постоянная или переменная) и усилие (перемещение) на выходе. Конструктивно сервомотор часто представляет единый узел вместе с усилителем, в особенности в гидравлических и пневматических устройствах.
Требования к исполнительным устройствам: линейное (угловое) перемещение согласуется с перемещением регулирующего органа; статическая характеристика должна быть по возможности линейной; сервомотор — реверсивный, с рабочими органами минимальной массы; мощность должна обеспечивать заданную скорость перемещения на любых режимах.
Среди электрических сервомоторов, получивших наибольшее распространение в автоматике, следует назвать электродвигатели и электромагниты. По устройству и принципу действия электрические двигатели классифицируют на асинхронные, синхронные и коллекторные. Асинхронные и синхронные являются двигателями переменного тока, коллекторные могут работать на переменном или постоянном, а универсальные — на переменном и постоянном токе. Асинхронные двигатели применяют для приводов с регулируемой и постоянной частотой вращения, синхронные — для приводов с постоянной частотой вращения. Двигатели постоянного тока широко используются для приводов с регулируемой частотой, коллекторные переменного тока — в системах, где требуется частота вращения, превышающая 3000 мин-1, при промышленной частоте тока 50 Гц. В качестве сервопривода применяют асинхронные двигатели с короткозамкнутым ротором.
Специфика использования электродвигателей в качестве сервомоторов определяет и характер предъявляемых к ним требований в отношении реверсивности, изменения частоты вращения и устойчивости в широком диапазоне, линейности статической характеристики, большого пускового момента, самоторможения при снятии сигнала управления, быстродействия, малых габаритов и массы.
Длительное время большинство электродвигателей выпускались быстроходными, что создавало определенные трудности при сочленении с регулирующими органами. Появление моторов с малой скоростью вращения, например серии МЭО, которые совершают один оборот за 40, 100, 250 и 630 с, позволило значительно усовершенствовать технику автоматизации. Разработана серия унифицированных исполнительных механизмов блочно-модульной конструкции с регулируемой скоростью вращения.