

Порядок выподлнения работы
Рассматривается задача параметрической идентификации апериодического звена первого порядка. Параметры KOиTOобъекта, а также исходные значения параметровKмиTммодели по вариантам приведены в табл. 3.1. В качестве регулятора используется ПИ-регулятор (параллельное соединение пропорционального и идеального интегрирующего звеньев) с коэффициентами настройки равными 2 и 1 для пропорционального и интегрирующего каналов соответственно.
Таблица 3.1 - Параметры объекта и исходные параметры модели
|
№ варианта |
Объект |
Модель | ||
|
KO |
TO |
Kм |
Tм | |
|
1 |
1 |
1 |
0,5 |
3 |
|
2 |
2 |
4 |
1 |
2 |
|
3 |
3 |
6 |
2 |
2 |
|
4 |
1 |
5 |
4 |
1 |
|
5 |
2 |
1 |
5 |
2 |
|
6 |
2 |
5 |
6 |
1 |
|
7 |
3 |
4 |
5 |
1 |
|
8 |
5 |
1 |
2 |
3 |
Создать в среде Simulinkсхему, приведенную на рис. 3.2. КоэффициентKустановить равным 0.
Перейти в меню Simulation – ConfigurationParameters, выбрать метод моделирования (например, метод Рунге-Кутта) и установить шаг моделирования Δt=0.05 , время моделированияtк=10.
Перейти в режим оптимизации системы (SignalConstraint). Оптимизация осуществляется по параметрам моделиKмиTм. Область поиска ограничить интервалом [0.1;10].
Выполнить оптимизацию, для чего нажать клавишу StartOptimization. Результат идентификации можно наблюдать по ее окончании в окне Optimization Progress.
Повторить процесс идентификации из исходных начальных значений параметров модели для следующих значений коэффициента Kв канале формирования погрешности η(t):
K=0.01; 0.02; 0.05.
Контрольные вопросы
3.5.1 Какой критерий идентификации используется в работе?
3.5.2 Как влияет дисперсия последовательности η(t) на точность идентификации?
3.5.3 Можно ли по результатам идентификации утверждать, что МНК – оценки в рассматриваемой схеме являются несмещенными?
3.5.4 Чему равна дисперсия η(t) для каждого из четырех значенийK, реализованных в работе?
3.5 Содержание отчета по лабораторной работе
Схема идентификации объекта в контуре регулирования.
Параметры объекта и исходные параметры модели.
Результаты идентификации при различных значениях дисперсии погрешности измерения η(t).
Лабораторная работа №4 Построение переходных процессов в непрерывных динамических системах при помощи ЭВМ методом структурного моделирования
4.1 Цель работы
Освоение методики моделирования на цифровой ЭВМ переходных процессов в непрерывных динамических системах.
4.2Теоретическая часть
Существуют различные способы моделирования на ЭВМ переходных процессов в динамических системах. Выбор алгоритмов моделирования в основном определяется формой математического описания системы и имеющимся программным обеспечением. Если система задана обыкновенными дифференциальными уравнениями, то чаще всего применяют численные методы интегрирования. Наиболее распространенной в программном обеспечении ЭВМ является реализация метода Рунге –Кутта /2, 3/.
Если динамическая система задана структурной схемой, то переходные процессы в ней удобно строить при помощи метода структурного моделирования /4,5/. Суть метода состоит в том, что ЭВМ по рекуррентным формулам последовательно вычисляет значения выходов отдельных звеньев системы в дискретные равностоящие моменты времени. Получение рекуррентных формул для звеньев первого порядка продемонстрируем на примере определения реакцииy(t) идеального интегрирующего звена на произвольное непрерывное воздействиеx(t).

Рисунок 4.1 -Аппроксимация входного сигнала
Время tннаблюдения за рассматриваемым звеном разобьем на большое число достаточно малых интервалов длительностью Δt. На каждом таком интервале сигналx(t) заменим прямой, проходящей через точкиx((n–1)∙Δt) иx(n∙Δt) (прямой, которая на границах интервала совпадает с исходной кривойx(t)), гдеn –номер интервала. В результате исходный сигналx(t)аппроксимируется ломаной, представленной на рис. 4.1.
Введем обозначения
xn=x(nΔt);yn=y(nΔt);.
Как следует из геометрического смысла определенного интеграла, выход идеального интегрирующего звена может быть вычислен по следующей форме:
yn = yn-1+K ∙Qn;n-1 ,
где Qn;n-1 – площадь фигуры, ограниченной кривой входного сигналаx(t) на интервале времени ((n–1)∙Δt,n∙Δt) осью времениt,а также перпендикулярами к осиtв точках (n–1)∙Δtиn∙Δt.
При линейной аппроксимации входного сигнала эта фигура является трапецией (на рис. 3 заштрихована).
Площадь трапеции
![]() .
.
Таким образом,
![]() .
.
Можно показать, что для всех линейных звеньев первого порядка уравнение имеет вид
yn=α1∙yn-1+α2∙yn+α3∙xn-1, (1)
где α1,α2,α3– числовое коэффициента, зависящие от типа и. параметров звена, а также от выбранной величины интервала Δt. Для высокой точности моделирования переходных процессов в звене Δtдолжно быть достаточно малым. В табл. 3 приведены значения коэффициентовα1,α2,α3и максимально допустимые величины интервалов Δtдля некоторых звеньев первого порядка. Более обширные данные можно найти в /4,5/.
Таблица 4.1- Значения коэффициентов α1, α2, α3 и Δtmax для некоторых
звеньев первого порядка
|
Передаточная функция звена |
α1 |
α2 |
α3 |
Δtmax |
|
|
1 |
|
α2 |
|
|
|
0 |
|
-α2 |
|
|
|
|
|
|
|
|
|
|
|
-α2 |
|
|
|
0 |
|
|
|
Для колебательного звена рекуррентная формула имеет сложный вид поэтому целесообразно это звено, передаточная функция которого имеет вид
![]() ,
,
заменять эквивалентной схемой (рис. 4).
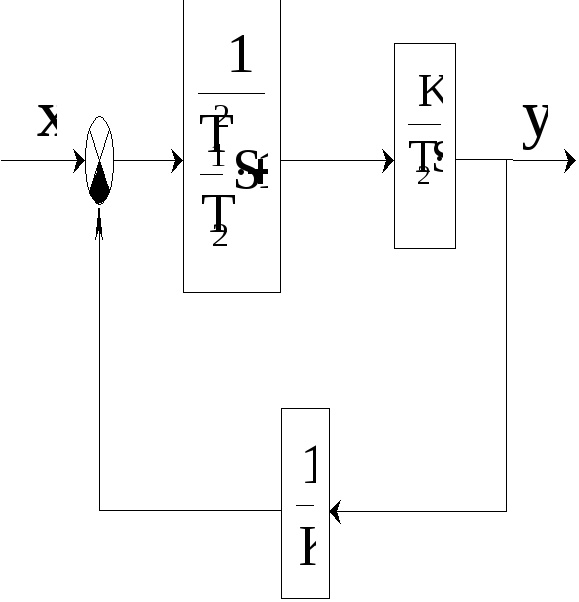
Рисунок 4.2 - Схема замещения колебательного звена
Рассмотрим теперь процедуру моделирования переходных процессов в замкнутой динамической системе на примере построения переходной характеристики системы, структурная схема которой приведена на рис. 4.3.

Рисунок 4.3 - Замкнутая система
Обозначим значения всех сигналов в системе в момент подачи воздействия x(t)=1(t) (в момент 0+) нулевым индексом. При определении этих значений необходимо учитывать, что выходы интегрирующего –v(t) и апериодического звена первого порядка –y(t) при конечных значениях входных сигналов не имеют разрывов, поэтомуv0=0 иy0=0.
Тогда x0=1;e0=x0–y0=1;z0=0.2;u0=v0+z0=0.2.
Значения всех сигналов в системе через время Δt(конец интервала) обозначим индексом "1". Расчет начинаем со звена0.5∕S– первого после элемента сравнения звена. Предположим, что вход этого звенаe1известен (на определенииe1остановимся ниже). Тогда по рекуррентным формулам вида (1) определимv1, как выход интегрирующего звена, входом которого является сигналe
v1=α1∙v0+α2∙e1+α3∙e0, (2)
где коэффициенты α1,α2,α3– находим по табл. 3.z1является выходом безинерционного звена с коэффициентом усиления, равным 0.2
z1=0.2∙e1;u1=v1+z1=v1+0.2∙e1.
В свою очередь, uявляется входом апериодического звена первого порядка, выход которого у1определяется по формуле, аналогичной (2). Таким образом, вычислен выходной сигнал системы. Вернемся к определению значенияe1(вначале мы предположили его известным).
Для того чтобы вычислить e1=x1–y1необходимо знатьy1. Однако вначалеy1неизвестно, поэтому вместо него используетсяy0– значение сигнала обратной связи в начале интервала Δt. При маломΔtотличиеy0иy1незначительно, но все-таки оно вносит определенную ошибку вe1,а значит и вv1,z1,u1иy1, вычисляемые с использованиемe1.Для повышения точности расчет всех сигналов для этого временного интервала можно повторить,используя в определении e1,найденное значениеy1. Такое повторение производится до тех пор, пока уточняемые решения не станут достаточно близкими. После этого необходимо перейти к следующему временному интервалу.
Необходимо отметить, что при моделировании переходного процесса, в рекуррентных формулах используются значения сигналов только в два момента времени –в начале и в конце интервала Δt. Поэтому в памяти ЭВМ можно хранить также только по два таких значения. Закончив расчет дляn-го временного интервала и получив значения всех сигналов в конце этого интервала (сигналы с индексом "1"), необходимо записать их в массив, предназначенный для хранения значений сигналов в начале интервала (сигналов с индексом "0"). Так как момент окончания n-гоинтервала совпадает с началом (n+1)-го.
При выборе величины Δtнеобходимо исходить из приведенных втабл. 3 рекомендаций по максимально допустимому значению интервала Δtmax динамических звеньев. Принятая для моделирования величинаΔtне должна превышать Δtmax ни для одного из звеньев, входящих в систему.
Отметим что, как правило, время наблюдения за системой разбивается на сотни или тысячи интервалов Δt поэтому при разработке программы моделирования необходимо так организовать вывод контролируемых сигналов на дисплей (печать), чтобы объем выводимых данных не был чрезмерным. Это достигается тем, что в течение какого-то числа интервалов Δt переходный процесс просчитывается без вывода на дисплей.