

ЭкологияОбразоватДеятельности / МатериалыПрактЗанятий / ЭкОбрДеят_Пр 16 / notv2009_book_1
.pdfНовые образовательные технологии в вузе – 2009
Рис.2. Виртуальная панель лабораторного практикума «Электрическая цепь синусоидального тока»
Работа студентов происходит в том же порядке, что и при выполнении работ в учебной лаборатории кафедры на физических моделях:
предварительная самостоятельная подготовка;
допуск к работе в форме беседы, семинара, коллоквиума, контрольного тестирования;
ознакомление с виртуальным практикумом в компьютерном классе;
выполнение виртуальных экспериментов в соответствии с программой работы;
обработка результатов экспериментов;
анализ результатов, формулирование выводов, составление отчета.
Таким образом, основные требования, предъявляемые к студентам при выполнении виртуальной лабораторной работы, не отличаются от тех, которые предъявляются при работе на физических лабораторных установках.
Разработанный виртуальный практикум апробирован при проведении учебных занятий в специализированной аудитории кафедры ЭЭТС УГТУУПИ.
При организации лабораторных занятий с использованием виртуальных практикумов студенты выполняли работы индивидуально, либо бригадами по 2 человека. При этом исключалось дублирование параметров элементов виртуального стенда (каждый студент получал индивидуальный вариант параметров элементов и режимов работы виртуального стенда). Такая организация работы позволила планировать и выполнять работу в индивидуальном темпе в соответствии с индивидуальными возможностями

Секция 2
студента, степенью его подготовленности, достигая необходимого результата. При этом стимулируется персональная ответственность, самостоятельность, проявляется заинтересованность студентов, обеспечивается поддержка методов активного обучения, создаются условия для активизации работы студента.
Виртуальный практикум вполне может выполняться студентом как под руководством преподавателя в аудитории, так и в рамках самостоятельной работы. Части студентов была предоставлена возможность самостоятельного выполнения виртуального практикума вне учебной аудитории (в домашних условиях, наиболее комфортных для них). При этом отчеты по выполненным работам предоставлялись по согласованным индивидуальным графикам, удобным для студентов.
Он также позволяет использовать его в качестве лекционных демонстраций, без громоздкости и существенных материальных затрат, присущим демонстрационным экспериментам на физических моделях.
Достоинства виртуального практикума способствуют большей эффективности учебного процесса, позволяют сформировать учебнометодический комплекс, отвечающий современным требованиям инновационного образования.
Необходимо отметить, что при выполнении практической части дисциплины (лабораторного практикума) не следует ограничиваться виртуальными практикумами. Выполнение работ на лабораторных стендах с физическими моделями должно быть неотъемлемой частью процесса обучения. Очевидно, виртуальная лаборатория не может полностью заменить реальную физическую установку. Тем не менее, при выполнении компьютерных лабораторных работ у учащихся формируются, определенные навыки, которые им необходимы и для постановки реальных физических экспериментов.
Комплексное использование виртуальной лаборатории и физического эксперимента способствует эффективному процессу формирования практических умений и навыков при обучении специалистов.
241

Новые образовательные технологии в вузе – 2009
Рощева Т.А., Митюшов Е.А., Берестова С.А.
АНАЛИТИЧЕСКИЕ АЛГОРИТМЫ КИНЕМАТИКИ ТВЕРДОГО ТЕЛА teormech@mmf.ustu.ru
ГОУ ВПО "УГТУ-УПИ имени первого Президента России Б.Н.Ельцина"
г. Екатеринбург
Возможности современных информационных технологий обязывают расширить применение аналитических методов к решению задач механики.
В работе рассматриваются аналитические методы решения задач кинематики плоских механизмов, сферического и свободного движений твердого тела, основанные на некоторых нетрадиционных следствиях теорем Эйлера и Ривальса.
Possibilities of modern information technologies oblige to expand application of analytical methods to the decision of problems of mechanics.
In work analytical methods of the decision of problems of kinematics of flat mechanisms, spherical and free movements of the firm body, based on some nonconventional consequences of theorems of Euler and Rivals are considered.
Изменение целей, методов, а также содержания любой учебной дисциплина – это естественный и закономерный процесс. Последним, наиболее существенным, реформированием в преподавании теоретической механики был переход к инвариантной (векторной) форме записи основных ее теоретических положений. Это позволило значительно сократить объем курса, добавив, во многих случаях, наглядность и физическую ясность излагаемому материалу. Средствами кинематического анализа механических систем при этом оставались преимущественно геометрические методы. Возможности современных информационных технологий обязывают, на наш взгляд, расширить применение аналитических методов к решению задач теоретической механики. Это позволит более эффективно использовать то небольшое количество часов, которое отводится на изучение курса, а также получать современные, адаптированные к возможностям имеющихся графических пакетов, математические модели механического движения.
В настоящей работе рассматриваются аналитические методы решения задач кинематики плоских механизмов, сферического и свободного движений твердого тела, основанные на некоторых нетрадиционных следствиях теорем Эйлера и Ривальса.
Как правило, при математическом моделировании процессов, связанных с изменением положения твердого тела в пространстве, использование законов классической механики основано на векторном представлении определяющих параметров движения (таких, например, как угловая скорость или угловое ускорение), а известные матричные записи

Секция 2
|
z |
y |
|
|
|
z |
y |
|
0 |
|
|
0 |
|
||||
z |
|
|
|
z |
|
|
. |
|
0 |
x |
; |
0 |
x |
||||
y |
x |
0 |
|
|
y |
x |
0 |
|
остаются предметом лишь теоретических исследований. Использование матричных методов, когда основные соотношения между кинематическими соотношениями представлены в виде матричных уравнений, позволило, во-первых, получить удобные для практического использования формулы определения ускорений при произвольном движении твердого тела, и во-вторых, дополнить теоретические основы кинематики твердого тела новыми следствиями, облегчающими процесс исследования движения и обеспечивающими возможность построения алгоритмов этого исследования.
Как известно, связь между скоростями и ускорениями двух точек твердого тела устанавливается формулами Эйлера и Ривальса
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vB vA AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
||
|
|
aB aA |
AB AB |
|
|
|
|
|
|||||||||||||
При матричной реализации операций над векторами эти соотношения |
|||||||||||||||||||||
принимают вид [1] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
vB |
|
vA |
|
|
AB , |
aB |
|
|
аA |
|
( |
|
|
|
2 |
)( AB) . |
(2) |
||
|
|
|
|
|
|
|
|
|
|||||||||||||
где vA , |
vB |
ˆ |
ˆ |
|
ˆ |
|
ˆ |
|
|
|
|
|
|
||||||||
аA , aB – вектор-столбцы скоростей и ускорений соответствующих |
|
||||||||||||||||||||
ˆ |
ˆ |
ˆ |
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точек. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножим обе части равенства (2) слева на вектор-строку ABТ |
|
||||||||||||||||||||
|
|
|
Т |
ˆ |
|
|
|
Т |
|
|
|
|
Т |
( |
|
|
2 |
|
|
||
|
|
|
|
|
AB аA |
AB |
|
|
|
)AB |
|
||||||||||
|
|
AB aM |
|
|
|
|
|
|
|
|
|
||||||||||
Учитывая, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ABТ AB =0 ; ABТ = (vA vB )T ; AB = vB vA , |
|
||||||||||||||||||
после некоторых преобразований получим |
|
||||||||||||||||||||
|
|
ABТ |
(aA aB ) = (vA vB )T |
(vA vB ) . (3) |
|
||||||||||||||||
В векторной записи формула (3) имеет вид |
|
||||||||||||||||||||
|
|
(aA aB ) AB (vA vB )2 . |
|
|
|
|
|
|
|
(4) |
|||||||||||
Это соотношение может быть успешно использовано при решении многих задач кинематики твердого тела наряду со следствием о проекциях скоростей двух точек твердого тела на ось, проходящую через эти точки.
При сферическом движении уравнение (4) записывается следующим образом
aB rB vB2 .
243

Новые образовательные технологии в вузе – 2009
Еще одно полезное (по крайней мере, для исследования движения плоских механизмов) следствие может быть получено из уравнения (2) умножением обеих частей слева на (vB vA )T = ( AB)T .
|
|
|
|
|
T |
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
T |
|
( |
|
|
|
2 |
)(AB) . |
|
|
|
||
(vB |
vA ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
(aB |
|
|
аA ) = ( AB) |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Откуда |
vA ) |
|
|
(aB |
|
|
аA ) = AB |
|
|
|
|
|
|
AB или |
|
|
|
||||||||||||||
(vB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
T |
|
|
ˆ |
|
|
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
|
|
|
||||
|
|
(vB |
|
|
|
|
(aB |
|
|
|
|
|
|
|
l , |
|
|
|
(5) |
||||||||||||
|
AB2 |
|
|
|
vA ) |
|
|
аA ) =l |
|
|
|
|
|
|
|
|
|||||||||||||||
1 |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где l – «орт» прямой, проходящей через точки A и |
B , l |
|
. |
||||||||||||||||||||||||||||
AB |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В векторных обозначениях формула (5) принимает вид |
|
||||||||||||||||||||||||||||||
|
(vA vB ) (aA aB ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прAB |
прAB . |
|
|
|
|
|
||||||||||
|
|
|
|
|
AB |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
А расчет плоских механизмов можно проводить с использованием |
|||||||||||||||||||||||||||||||
очевидного следствия: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
(v |
v |
) (a |
a |
B |
) |
|
z z , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
A |
|
|
B |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
AB |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
в случае, если движение происходит в плоскости Oxy .
Другие важные соотношения кинематики точки и твердого тела также легко получаются с использованием матричных алгоритмов записи кинематических соотношений (кинематические уравнения Эйлера и теорема Кориолиса об определении ускорения точки при сложном движении). Опыт применения предложенных алгоритмов при работе с группой студентов строительного факультета продемонстрировал, что они не вызывают трудностей (студенты увереннее манипулируют с матрицами, чем с геометрическими векторами).
В заключение отметим, что изложение многих вопросов динамики также существенно упрощается с использованием рассмотренных представлений.
Секция 2
Сапсалев А.В., Касаткина Е.Г., Алгазин Е.И.
СПОСОБ КОМПЬЮТЕРНОГО АНАЛИЗА НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
Sa@koe.ref.nstu.ru
Новосибирский государственный технический университет (НГТУ) г. Новосибирск
Предложен способ анализа нелинейных задач электротехники методом переменных состояния. Для аппроксимации вольтамперных характеристик нелинейных элементов используются кубические сплайны из библиотеки встроенных функций программы Mathcad. Данный способ позволяет анализировать линейные и нелинейные электрические цепи как при постоянных, так и при синусоидальных входных воздействиях.
Постановка задачи На примере приведенной схемы необходимо, используя метод
переменных состояния, а также аппроксимацию вольтамперной характеристики нелинейного элемента, заданной таблично, произвести расчеты токов и напряжений цепи.
Решение поставленной задачи
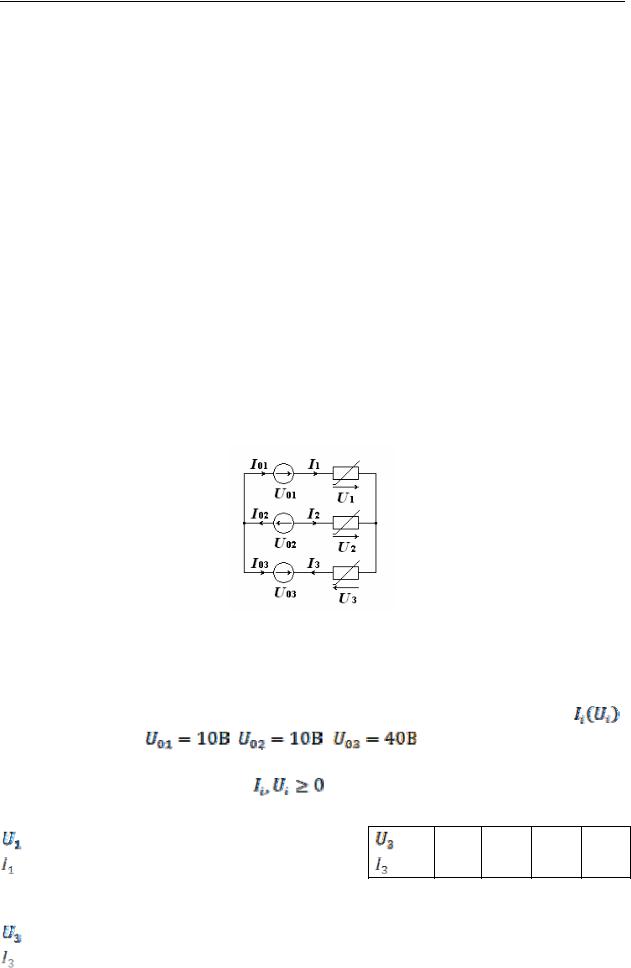
Рис.1. Схема электрической цепи
Решение проследим на примере вычисления значений токов и напряжений резисторов электрической схемы (рис.1), определенных своими
центрально-симметричными |
вольт-амперными |
характеристиками |
, |
|
(табл. 1 – 3), если |
, |
, |
. Отметим, что в таблицах |
|
приведены значения координат нескольких точек графиков ВАХ лишь для первых квадрантов плоскостей , где i =1,2,3.
|
ВАХ резистора 1 Таблица 1 |
|
||||
, В |
0 |
3 |
10 |
20 |
40 |
50 |
|
|
|
|
|
|
|
, А |
0 |
0.10 |
0.20 |
0.25 |
0.30 |
0.31 |
|
|
|
|
|
|
|
ВАХ резистора 2 Таблица 2 , В 0 3.5 10 16
, А |
0 |
0.10 0.18 0.20 |
|
|
|
ВАХ резистора 3 |
Таблица 3 |
|
|
|
|||
, В |
0 |
3.5 |
10 |
16 |
20 |
|
30 |
35 |
40 |
50 |
|
|
|
|
|
|
|
|
|
|
|
, А |
0 |
0.10 |
0.18 |
0.20 |
0.20 |
0.20 |
0.21 |
0.23 |
0.40 |
|
|
|
|
|
|
|
|
|
|
|
|
245
Новые образовательные технологии в вузе – 2009
Решение.
Запишем в рабочий документ Mathcadа числовые значения параметров источников напряжения: 
Далее получим аналитические выражения вольтамперных характеристик нелинейных резисторов ,  , . Аппроксимируем эти наборы
, . Аппроксимируем эти наборы
точек графиков ВАХ кубическими сплайнами с помощью встроенной в
Mathcad функции interp(s,X,Y,t).
Внимание! Поскольку |
знаки значений напряжений и токов резисторов |
||
заранее неизвестны, то |
определим выражения их ВАХ |
в первом и |
|
третьем квадрантах плоскостей |
. Переопределим значение |
||
встроенной переменной ORIGIN, положив его равным 1.
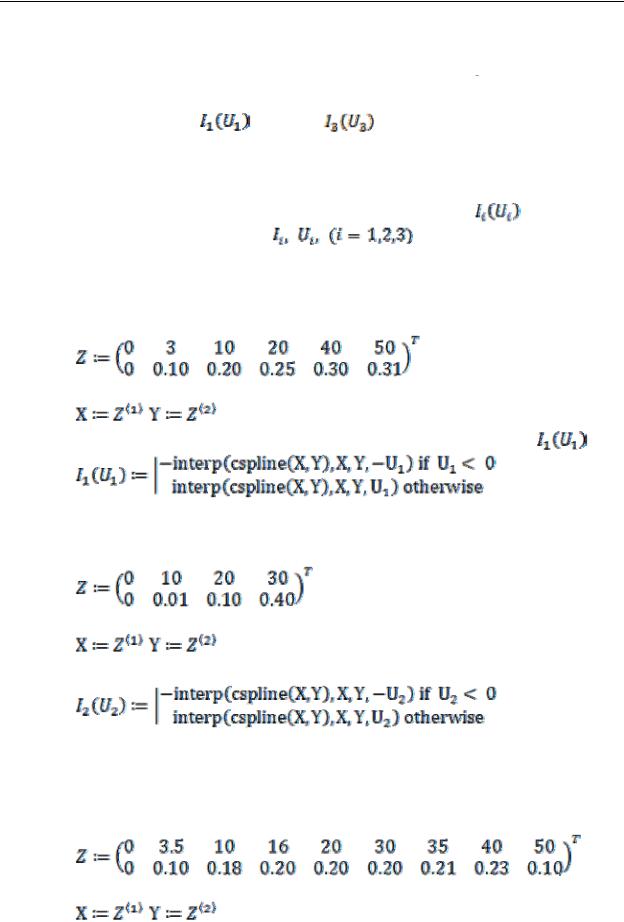
Начнем с аппроксимации (интерполяции) ВАХ первого резистора (табл. 1).
1.Создадим вспомогательную матрицу Z (dim Z = 6×2), столбцами которой являются соответствующие строки таблицы:
2.Определим далее векторы значений аргумента X и функции Y:
3. Определим выражение ВАХ первого нелинейного резистора |
: |
Аппроксимируем (интерполируем) теперь ВАХ второго резистора (табл. 2).
1.Создадим вспомогательную матрицу Z (dim Z = 4×2), столбцами которой являются соответствующие строки таблицы:
2.Определим далее векторы значений аргумента X и функции Y:
3.Определим выражение ВАХ второго нелинейного резистора :
:
И, наконец, аппроксимируем (интерполируем) ВАХ третьего резистора
(табл. 3).
1.Создадим вспомогательную матрицу Z (dim Z = 9×2), столбцами которой являются соответствующие строки таблицы:
2.Определим далее векторы значений аргумента X и функции Y:
3.Определим выражение ВАХ третьего нелинейного резистора :
:
Секция 2
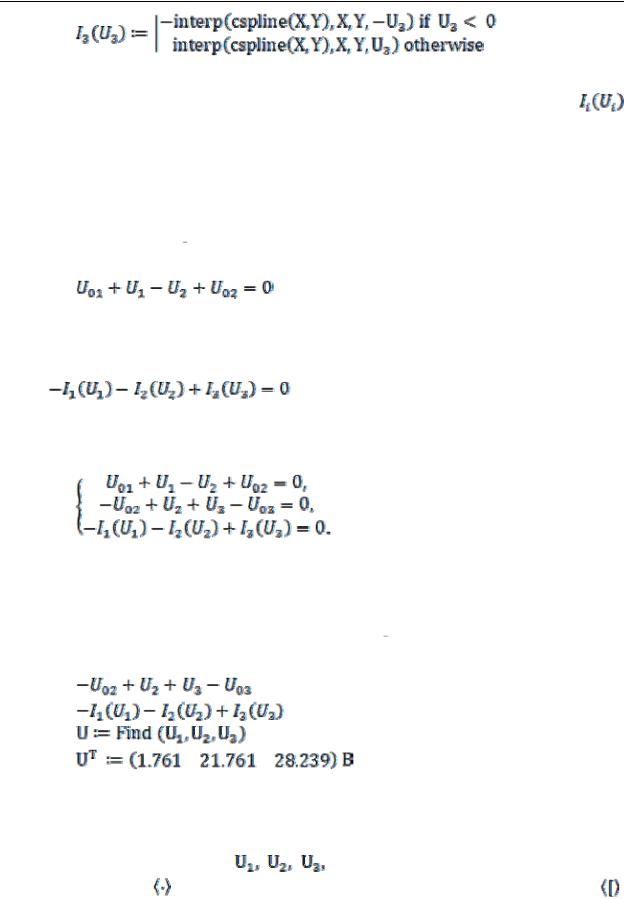
На этом подготовка исходных данных задачи закончена. Полученные выражения ВАХ резисторов цепи в виде
определяют выбор независимых переменных системы уравнений стационарного состояния цепи. Решим поставленную задачу методом напряжений резисторов цепи. По законам Кирхгофа составим систему уравнений стационарного состояния цепи со схемой, показанной на рис. 1. В
качестве независимых переменных состояния цепи выберем напряжения ее резисторов  ,
,  и
и  . Запишем уравнения баланса напряжений элементов
. Запишем уравнения баланса напряжений элементов
цепи, например, для верхнего и нижнего внутренних контуров ее схемы:
,
 .
.
Запишем уравнение баланса токов элементов цепи для одного из двух узлов ее схемы, например, для правого узла:
.
Таким образом, стационарные значения напряжений резисторов исследуемой цепи (рис. 1) определяются нелинейной системой алгебраических уравнений:
Решим ее.
Ниже приведен соответствующий фрагмент численного решения этой системы уравнений в Mathcadе:
Пусть 
Given  = 0
= 0
= 0
= 0,
Результаты этих и последующих вычислений отображены в протоколе с точностью до .
.
Отметим, что элементы последней матрицы являются значениями
индексной |
переменной |
U: |
индексы которых вводятся не с |
||
помощью |
точки |
, |
а с помощью |
открывающей прямой скобки |
. |
Внимание! Аргументами всех последующих варажений ВАХ в рабочем документе Mathcadа являются компоненты индексной переменной (вектора) U.
247
Новые образовательные технологии в вузе – 2009
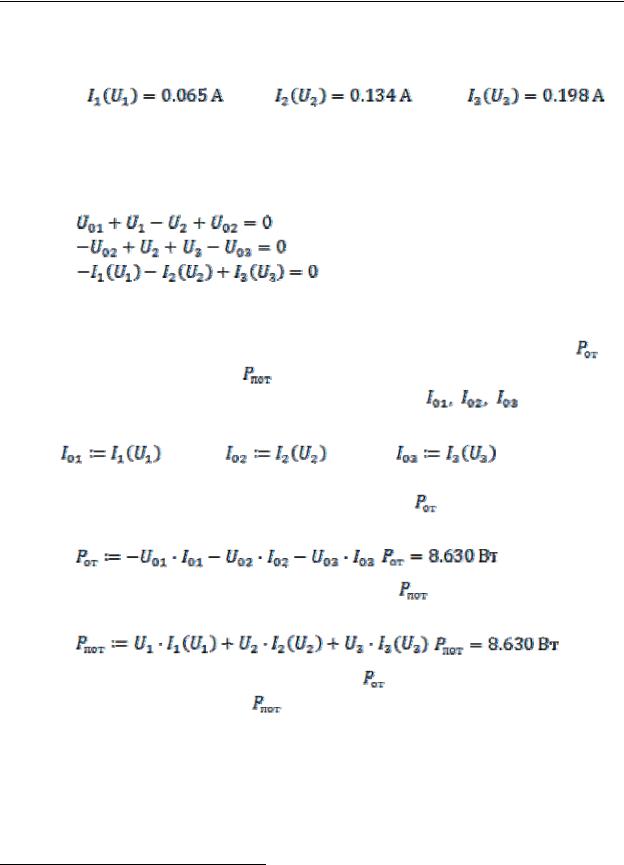
Вычислим теперь значения зависимых переменных состояния цепи. Найдем значения токов резисторов, используя выражения их
вольтамперных характеристик:
Проверить полученные результаты можно одним из двух альтернативных способов.
1-ый способ:
Проверим соблюдение законов Кирхгофа для схемы исследуемой цепи:
,
2-ой способ:
Проверим соблюдение баланса мощностей активных и пассивных
элементов цепи – отдаваемой источниками |
напряжения |
цепи |
и |
||||||
потребляемой ее резисторами |
. |
|
|
|
|
|
|
||
Предварительно вычислим значения |
токов |
|
источников |
||||||
напряжения: |
|
|
|
|
|
|
|
|
|
Далее |
вычислим |
значение |
мощности |
, |
отдаваемой |
всеми |
|||
источниками напряжения цепи: |
|
|
|
|
|
|
|
||
Вычислим теперь |
значение |
мощности |
, |
потребляемой |
всеми |
||||
резисторами цепи: |
|
|
|
|
|
|
|
|
|
Как |
видим, значения |
мощности |
, |
отдаваемой |
источниками |
||||
напряжения цепи, и мощности , потребляемой ее резисторами, совпадают
с точностью до трех значащих цифр после запятой. Задача решена верно. Выводы Использование кубических сплайнов для анализа нелинейных задач
электротехники дает возможность пользоваться встроенными функциями программы Mathcad, тем самым обогащая инструментарий современных специалистов.
1.Очков В.Ф. Mathcad 7 Pro для студентов и инженеров. – М.: Компьютер-пресс, 1998 г.
2.Сборник задач и упражнений по теоретическим основам электротехники / Под ред. д.т.н., проф. Конкина П.А. – М: Энергоиздат, 1982 г.

Секция 2
Сафина О.Г., Матвеева Т.В.
ВНЕДРЕНИЕ ДИСТАНЦИОННОГО ОБУЧЕНИЯ В УГТУ-УПИ НА ПРИМЕРЕ ЦЕНТРА ДОПОЛНИТЕЛЬНОЙ ПРОФЕССИОНАЛЬНОЙ ПЕРЕПОДГОТОВКИ
sog@post.ustu.ru
ГОУ ВПО "УГТУ-УПИ имени первого Президента России Б.Н.Ельцина"
г. Екатеринбург
Новые информационные технологии, и в частности, возможности передачи по сети Интернет текстовой, звуковой, графической и видеоинформации создают огромные возможности их использования в педагогическом процессе. Достоинства распределенного дистанционного обучения обусловлены его новыми функциями, расширением возможностей и сервиса предоставления образовательных услуг обучающимся, распределенным по различным сегментам рынка и территориям, а также использованием системы гибкого непрерывного образования, гибких графиков, проведения занятий в синхронном и асинхронном режимах. Основной особенностью гибких режимов обучения является то, что они не так жестко регламентируют временные и пространственные рамки проведения занятий и общения между преподавателями и студентами. Это позволяет преподавателям и студентам более гибко планировать время обучения и учебные процесс. Особенно это важно для студентов-заочников, студентов, живущих в других городах или обучающихся в других вузах.
Существуют разные модели дистанционного обучения. В последние годы все большее распространение получают четыре модели дистанционного обучения. Это:
интеграция очных и дистанционных форм обучения;
сетевое обучение (Интернет-технологии);
сетевое обучение и кейс-технологии;
интерактивное видео (спутниковая связь, интерактивное телевидение).
ВУГТУ-УПИ в Центре дополнительной профессиональной переподготовки Института дополнительного образования и профессиональной переподготовки дистанционная форма обучения введена с 2000 года. Хорошо зарекомендовали себя и активно используются кейсовые технологии. Преподавателями ЦДПП были созданы электронные учебнометодические комплексы (ЭУМК), которые являлись основой для кейса по специальностям «Экономика и управление предприятием» и «Бухгалтерский учет и аудит». Каждый учебно-методический комплекс содержит:
Презентация Центра ДПП
Видео вводной лекции изучаемой дисциплины
Курс лекций по данной дисциплине
Контрольный тест по дисциплине
249