


Начальные конусы перекатываются друг по другу без скольжения. Скорости точек колес, оказавшихся на полюсной линии ОР, равны. Вообще равны скорости точек любых соприкасающихся на линии ОР окружностей (рис. 10.1) колес. Взяв, например, средние окружности начальных конусов, напишем
V1 =ω1 d2m1 =ω2 d2m2 = V2 ,
откуда передаточное отношение
i = |
ω1 |
= |
dm2 |
= |
Pz2 |
= |
z2 |
=u |
||
|
z |
|||||||||
|
ω |
2 |
|
d |
m1 |
|
Pz |
|
|
|
|
|
|
|
|
1 |
1 |
|
|||
(Р – шаг зацепления на средних окружностях начальных – делительных конусов), кроме того
i = |
ω1 |
= |
dm2 |
= dm2 |
/ 2 |
= tgδ2 |
(10.1) |
|
dm1 |
/ 2 |
|||||||
|
ω2 |
|
dm1 |
|
|
(δ2 – угол при вершине делительного конуса колеса).
10.2 Эквивалентные цилиндрические колеса
Зацепление эвольвентных профилей зубьев конических колес выглядит на дополнительных конусах как зацепление зубьев цилиндрических прямозубых колес. Диаметры этих эквивалентных колес (рис. 10.3)
dV1 = 2O1P = 2 |
O1′P |
= |
de1 |
, |
dV 2 = |
de2 |
; |
(10.2) |
|
||||||||
|
|
|
||||||
|
cosδ1 |
cosδ1 |
|
cosδ2 |
|
|||
числа зубьев эквивалентных колес находятся из соотношений
mz |
= |
|
mz1 |
, |
mz |
|
= |
mz2 |
, |
|
||
V1 |
|
|
cosδ1 |
|
V 2 |
|
|
cosδ2 |
(10.3) |
|||
z |
= |
|
z1 |
, |
z |
= |
|
z2 |
|
|
||
|
|
|
|
|
||||||||
V1 |
|
|
cosδ1 |
|
V 2 |
|
|
cosδ2 |
|
|
||
(m в формулах (10.3) – стандартный внешний окружной модуль зацепления). Приведенную кривизну зацепляющихся профилей зубьев в формуле Герца
(9.7)
1= 1 + 1
ρпр ρ1 ρ2
найдем здесь, пользуясь «средними» эквивалентными цилиндрическими колесами
(рис. 10.3) с размерами (см. формулы (10.2)) dm1 / cosδ1 ; |
dm2 / cosδ2 : |
|||||||||
|
1 |
= |
|
1 |
|
+ |
|
1 |
|
, |
|
|
|
2cosδ1 sinα |
|
2cosδ2 |
sinα |
||||
|
ρпр |
dm1 |
|
|
|
dm2 |
|
|
||
|
|
|
|
|
|
|
|
|||
где α – угол зацепления (стандартное значение 20°). Учитывая теперь формулу
(10.1), найдем:
66
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosδ2 = |
1 |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
1 |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1+ tg2δ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1+ u2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
cosδ1 |
= |
|
|
1 |
|
|
|
|
|
= |
|
|
|
|
1 |
|
|
|
|
|
= |
|
|
|
|
|
u |
|
. |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1+ tg2δ1 |
|
|
|
|
|
1 |
|
|
|
|
|
1+ u2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Приведенная кривизна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg δ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
= |
|
|
|
|
2u |
|
|
|
+ |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
= |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
+ |
|
1 |
|
|
|
= |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ρпр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dm1 sinα |
|
|
|
|
|
|
|
|
|
dm2 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
dm1 |
1 |
+u2 |
sinα |
|
dm2 |
1+u2 sinα |
|
|
1 |
+u2 |
|
1 |
+u2 |
|
|
(10.4) |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dm1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
|
2 |
|
u |
|
|
+ |
|
1 |
|
|
|
|
= |
|
|
|
|
2 |
|
|
|
1 |
+u |
2 |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dm1 sinα |
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
dm1 sinα |
1+u2 |
|
|
u |
|
1+u2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
в зацеплении цилиндрических прямозубых колес имеем
1 |
= |
2 |
|
1+u . |
|
ρ |
|
d sinα |
|||
пр |
|
|
u |
||
|
|
1 |
|
|
|
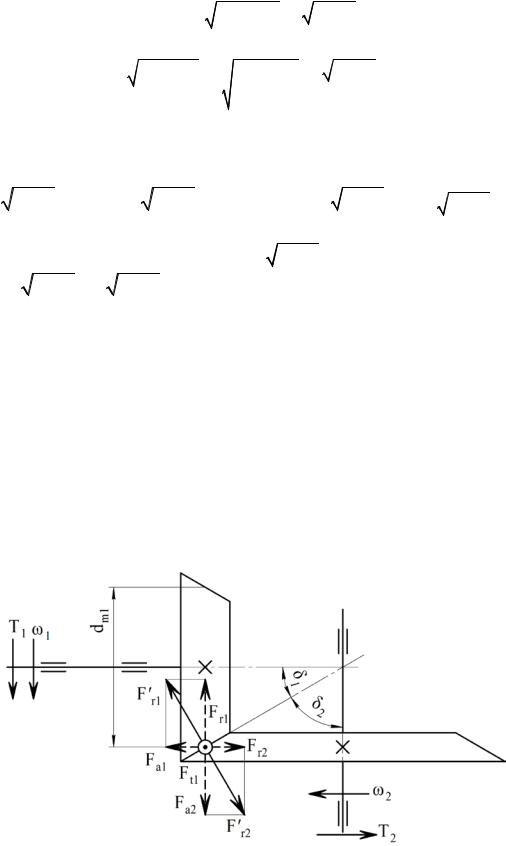
10.3 Силы в зацеплении конических колес
Опять же пользуясь средним делительным диаметром шестерни, найдем окружные силы: величина этих сил взаимодействия
Ft = Ft1 = Ft 2 = |
2T1 |
. |
(10.5) |
|
|||
|
dm1 |
|
|
Рисунок 10.4 – Силы в зацеплении конических колес
Силы, расталкивающие колеса (в зацеплении цилиндрических прямозубых колес радиальные силы)
67

Fr′ = Fr1′ = Fr2′ = Ft tgα ,
разлагаем их (рис. 10.4) на осевые и радиальные:
Fr1 = Fcosr′ δ1 = Fa2 ,
Fa1 = Fsinr′ δ1 = Fr2 .
10.4 Контактные напряжения, расчет на прочность
Учитывая отличия в формулах для приведенной кривизны (10.4), перепишем формулу (9.13):
σH = ZHZM |
W |
|
u2 +1 |
, |
(10.6) |
Ht |
|
|
|||
|
|
|
|
|
|
|
0,85dm1u |
|
|
||
где по-прежнему коэффициенты ZH =1,77 ; |
ZM = 275МПа1/2 , |
удельная расчетная |
|||
окружная сила |
|
|
|
|
|
WHt = Fbt KH β KHV ,
Ft – окружная сила в зацеплении (10.5).
Подчиняя контактные напряжения условию прочности
σH ≤[σH ],
где допускаемое напряжение
[σH ]= [σH ]1 +[σH ]2 ,
2
найдем, переписывая формулу (9.18), требуемый средний делительный диаметр шестерни:
|
T K |
H β |
u2 |
+1 |
|
|
|
dm1 = Kd 3 |
1 |
|
|
|
, |
(10.7) |
|
0,85ψbd [σH ]2 u |
|||||||
коэффициент Кd = 780 МПа1/3 (такой же, как в случае цилиндрической прямозубой передачи).
Заметим, что в формулы (10.6), (10.7) введен коэффициент 0,85, учитывающий консольное расположение (рис. 10.4) шестерни на ее валу, приводящее к усилению неравномерности распределения нагрузки по ширине зуба, и осевые силы в зацеплении, нагружающие подшипники в опорах валов. Все это приводит к снижению нагрузочной способности (по сравнению с нагрузочной способностью цилиндрической прямозубой передачи) на 15 %.
Разумеется, ширина зубчатого венца b не может быть какой угодно. Ее величина ограничена (рис. 10.3) внешним конусным расстоянием Re. Коэффициент ширины относительно внешнего конусного расстояния [4, с.195]
68

|
|
|
|
|
|
|
|
|
|
|
Kbe = |
|
|
|
b |
≤ 0,3. |
|
|
|
|
|
|
|
|
(10.8) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Коэффициент ширины относительно диаметра |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
ψ |
bd |
= |
|
|
b |
= |
b |
|
|
|
|
|
Re |
|
= K |
be |
|
Re |
, |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
d |
m1 |
|
|
R |
|
|
|
|
|
d |
m1 |
|
|
|
d |
m1 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где отношение (рис. 10.5) |
|
|
dm1 |
|
+ b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Re |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
2sinδ1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
= |
|
|
|
= |
|
|
|
|
|
+ψbd |
, |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
dm1 |
|
|
|
|
|
|
dm1 |
|
|
|
|
|
|
|
|
|
sinδ1 |
|
|
|
|
|
|
|
|||||||||||
– получается уравнение относительно ψbd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
ψbd = Kbe |
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ψbd |
, |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sinδ1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
откуда коэффициент |
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
K |
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ψbd = |
be 2 sinδ1 |
= |
|
|
be tgδ1 |
|
|
|
= |
|
|
|
Kbeu |
. |
(10.9) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2 − Kbe )cosδ1 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
(2 − Kbe )cosδ1 |
|
|
|
|||||||||||||||||||||||||
|
1− 2 Kbe |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В формуле (10.7) используется коэффициент (10.9), определенный при учете ограничения (10.8). Требуемая ширина зубчатого венца
b =ψbddm1 .
Внешний окружной модуль (стандартизуемый!)
me ≥10b .
По его принятии принимаются числа зубьев и все размеры конических колес.
Рисунок 10.5 – Внешнее конусное расстояние и средний делительный диаметр шестерни
10.5 Червячная передача
Червячная передача (рис. 10.6) – пример передачи со скрещивающимися валами. Ее можно рассматривать как резьбовое соединение винта – червяка и
69

гайки – червячного колеса и как косозубую передачу, состоящую из «колеса» – червяка с одним или несколькими винтовыми зубьями и червячного (косозубого) колеса.
Рисунок 10.6 – Схема червячной передачи
Последняя аналогия позволяет распространить формулу (9.20) для требуемого межосевого расстояния цилиндрической косозубой передачи на случай червячной передачи. Но требуется учесть, что в формуле (9.20) фигурирует передаточное число
u = |
z2 |
= dW 2 |
, |
(10.10) |
|
z1 |
|||||
|
dW1 |
|
|
формула которого следует из наличия двух начальных цилиндров, обкатывающих друг друга без скольжения. В червячных передачах таких цилиндров нет. Делительные цилиндры червяка и колеса на рисунке 10.6 интенсивно скользят друг по другу (см. на рисунке скорость скольжения Vск). Диаметр колеса
d2 = m z1 ,
где m – окружной модуль, равный осевому модулю червяка (рис. 10.7). Диаметр червяка
d1 = m q ,
где q = d1 / m – коэффициент диаметра червяка. Чтобы исключить излишне тонкие
червяки, стандарт предусматривает увеличение коэффициента q с уменьшением модуля m. Передаточное число (10.10) в формуле (9.20) заменим отношением
d2 = mz2 = z2 , d1 mq q
формула, аналогичная формуле (9.20), получит вид
aW = Ka′ |
z2 |
|
|
|
|
T2KH |
|
, |
||||
|
|
+1 |
|
|
|
|
|
|
||||
q |
z |
|
|
2 |
|
|||||||
|
|
3 |
2 |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
[σH ] |
|
|
|
|
|
|
|
|
q |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
или (если ввести коэффициент K′a под радикал)
70