


Ременные передачи в отличие от зубчатых передач работают бесшумно, на высоких скоростях; способны передавать движение на сравнительно большие (до 15 м) расстояния; при перегрузках ремень (ремни) проскальзывает по шкивам – передача не повреждается.
Вместе с этим, размеры шкивов намного превышают размеры зубчатых колес; предварительное натяжение ремня (ремней) намного (в 2-3 раза) увеличивает нагрузку на подшипники; передаточное число оказывается зависимым от нагрузки (не постоянно).
Наиболее распространена клиноременная передача – обычно с несколькими клиновыми ремнями. На рисунке 20.2 показаны фрагменты ремней, расположенные за шкивом передачи. На рисунке 20.3 показана плоскоременная передача – с одним плоским ремнем.
Рисунок 20.2 – Клиновые ремни |
Рисунок 20.3 – Плоский ремень |
20.1 Кинематика ременной передачи
Если считать, что ремень не проскальзывает по шкивам, скорость его (в первом приближении) равна окружным скоростям шкивов:
V |
=ω |
D1 =V |
=ω |
|
D2 |
=V , |
(20.1) |
||
1 |
1 |
2 |
|
|
|
2 |
2 |
2 |
|
передаточное отношение |
|
|
ω1 |
|
D2 |
|
|
|
|
|
i = |
= |
=u. |
|
(20.2) |
||||
|
|
|
ω2 |
|
D1 |
|
|
|
|
Но скольжение ремня по шкивам неизбежно.
Действительно, ведущая ветвь ремня (рис. 20.4) натянута сильнее ведомой. По мере огибания ведущего шкива натяжение ремня ослабевает, упругое удлинение ремня становится меньше – ремень “съеживается”, скользя по ремню. Это скольжение называется упругим. Из-за него ремень отстает от ведущего шкива, но обгоняет ведомый; скорости (20.1) не равны:
V1 =ω1 D21 >V >ω2 D22 =V2 ,
передаточное отношение (20.2)
134

i = |
ω1 |
> |
D2 |
=u, |
|
|
ω |
2 |
|
D |
|
|
|
|
1 |
(20.3) |
|
i = |
|
|
D2 |
||
|
|
, |
|||
D |
(1 |
−ε) |
|||
|
|
1 |
|
|
|
где ε ≈ 0, 01…0,02 – коэффициент упругого скольжения. При этих значениях коэффициента ε отношение (20.3), практически, не отличается от числа (20.2).
20.2 Геометрия ременной передачи
Синус угла наклона ведущей ветви ремня к горизонту находится из рассмотрения О1О2С (рис. 20.4):
sin β = О2С = D2 − D1 , 2 ОО1 2 2a
или (при обычно небольших углах β)
β ≈ D2 a− D1 = D1 u a−1,
что дает угол обхвата ведущего шкива
|
α°=180°− β ≈180°− |
|
D1 (u −1) 57°, |
|
|
(20.4) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
a – межосевое расстояние, u – передаточное число (20.2). |
|
|
||||||||||||||||||
Длина ремня |
|
|
|
|
|
|
|
|
D1 |
|
|
|
β) D2 |
|
|
|
|
|||
L = 2acos β |
+ (π |
− β) |
+ |
(π + |
, |
|
|
|
||||||||||||
где |
|
2 |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||
|
β |
|
|
|
|
|
|
|
1 |
|
|
2 β |
|
|
1 |
β |
||||
cos |
= 1−sin |
2 β |
≈1− |
sin |
≈1− |
|||||||||||||||
2 |
2 |
|
2 |
2 |
2 |
|
2 |
|
; |
|||||||||||
приближенно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L ≈ 2a + |
π |
(D |
+ D ) |
+ |
(D − D )2 |
|
|
|
|
(20.5) |
||||||||
|
|
|
|
|
2 |
|
1 . |
|
|
|
||||||||||
|
|
|
|
|
2 |
1 |
2 |
|
|
|
|
4a |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рисунок 20.4 – К определению угла обхвата и длины ремня
135
20.3 Силы в передаче
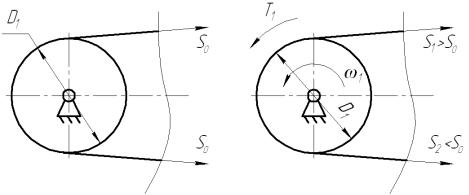
На рисунке 20.5 показан ведущий шкив неработающей передачи (ветви ремня натянуты силами предварительного натяжения S0) и работающей передачи (ведущая ветвь натянута сильнее ведомой: S1 > S2). Понятно, что н атяжение ведущей ветви S1 > S0, или
S1 = S0 + S; |
(20.6) |
ведущая ветвь получает дополнительное удлинение, что компенсируется таким же по величине дополнительным укорочением ведомой ветви (так как длина ремня задана, она одна и та же в неработающей и работающей передаче):
S2 = S0 - S. |
(20.7) |
Сумма натяжений (20.6–20.7) ветвей ремня
S1 + S2 = 2S0. (20.8)
Ведущий шкив работающей передачи вращается равномерно – сумма моментов сил, действующих на него, равна 0:
S |
D1 − S |
|
D2 |
−T = 0, |
|
1 |
2 |
2 |
2 |
1 |
|
разность натяжений |
S1 - S2 = 2Т1 / D1 |
(20.9) |
|||
|
|||||
равна окружной силе, или полезной нагрузке |
|
||||
Ft = 2T1 .
D1
Рисунок 20.5 – Неработающая и работающая передачи: S0 – силы предварительного натяжения, S1 и S2 – натяжения ветвей ремня
20.4 Формула Эйлера
Уравнения (20.8) и (20.9) требуется дополнить связью между натяжениями S1 и S2. Рассмотрим (с целью найти эту связь) равновесие бесконечно короткого фрагмента ремня на ведущем шкиве (рис. 20.6). Уравнения равновесия (в проекциях на касательную t и нормаль n к поверхности шкива):
136

−S cos dϕ |
+ (S + dS)cos dϕ |
− fdN = 0, |
|||
2 |
|
2 |
|
(20.10) |
|
dN − S sin dϕ |
−(S + dS)sin dϕ |
||||
= 0. |
|||||
|
2 |
|
2 |
|
|
Рисунок 20.6 – К выводу формулы Эйлера
В уравнения (20.10) входят натяжения в сечениях, ограничивающих фрагмент ремня, нормальная реакция dN поверхности шкива и сила трения, определяемая законом Амонтона
dFтр = fdN,
f – коэффициент трения. |
|
|
|
|
|
|
|
||||
Пределы |
|
|
|
|
|
|
|
||||
cos dϕ |
= lim cos |
∆ϕ |
= cos0 =1, |
||||||||
2 |
|
|
∆ϕ→0 |
|
2 |
|
|||||
|
sin dϕ |
|
|
|
sin |
∆ϕ |
|
||||
|
2 |
|
= lim |
|
|
2 |
=1, |
||||
dϕ |
|
∆ϕ |
|||||||||
|
|
∆ϕ→0 |
|
||||||||
2 |
dϕ |
|
dϕ |
2 |
|
||||||
что позволяет заменить sin |
на |
; бесконечно малую dSdφ второго порядка |
|||||||||
|
|
|
|
||||||||
2 |
2 |
|
|
|
|||||||
отбрасываем. Уравнения (20.10) переписываются: dS = fdN,
dN = Sdϕ.
В итоге получается одно дифференциальное уравнение с разделяющимися переменными
dSS = fdϕ.
Его интегрирование дает искомую связь:
S |
dS |
α |
|
|
∫1 |
=∫ fdϕ, ln S SS12 |
=α f , |
(20.11) |
|
S2 |
S |
0 |
|
S1 = S2eα f .
Решение системы трех уравнений (20.8, 20.9 и 20.11):
137