

|
mgl |
|
|
|
|
|
|
|
|
|
|
ω02 = |
|
|
|
I |
|
mgl |
|
||||
|
→ ω0 |
= |
|
|
|
T = 2π |
I |
|
– для физического маятника называют- |
||
I |
mgl |
||||||||||
|
|
|
|
|
|
|
|
ся циклическими (круговыми) частотами (в скобках периодами) колебаний. Тогда динамическое уравнение колебаний пружинного маятника имеет вид
d 2 x + ω2 x = xΙΙ + ω2 x = x + ω2 x = 0. |
|
||||||||||
dt2 |
|
0 |
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Динамическое уравнение колебаний физического маятника |
|
||||||||||
d 2ϕ |
+ |
mgl |
ϕ = ϕ |
ΙΙ |
+ |
mgl |
ϕ = ϕ+ |
mgl |
ϕ = 0 . |
|
|
dt2 |
I |
|
I |
I |
|
||||||
|
|
|
|
|
|
|
|
||||
Решением этого уравнения |
являются |
функции ϕ = ϕ0 sin(α)ω0t + |
или |
||||||||
ϕ = ϕ0 cos(α)ω0t + .
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
 FAp2
FAp2
FAp1
• |
• |
|
|
h |
h |
mg |
mg |
Задача 1. Ареометр, покоящийся в жидкости плотностью ρ , подтолкнули
вниз и он начал совершать колебания. Найти период малых колебаний ареометра, если его масса m , а площадь попе-
x речного сечения трубки S .
Решение. В состоянии покоя часть ареометра погружена на глубину h . На него будут действовать сила тяжести и сила Архимеда, равная силе тяжести, вытесненной ареометром жидкости:
FАp = mжидкg = ρShg
FАp = mжидкg = ρShg
где ρ – плотность жидкости; Sh =V − объем вытесненной ареометром жидкости.
Динамическое уравнение для этого состояния имеет вид |
|
0 = mg + FАp. |
(1) |
Когда ареометр толкнули вниз, он погрузился на глубину h + x и динамическое уравнение для этого состояния запишется в виде
ma = mg + FÀp2 , где FÀp2 = ρSg(h + x) . |
(2) |
В проекциях на оси координат уравнения (1) и (2) запишутся как |
|
OX 0 = mg −ρShg → mg = ρShg , |
(3) |
50
OX ma = m |
d 2x |
= mg −ρSg(h + x) . |
(4) |
|
dt2 |
||||
|
|
|
Подставим в уравнение (4) уравнение (3) и, проведя преобразования, получим формулу
|
m |
|
d 2x |
|
= −ρgSx |
→ m |
d 2x |
+ρgSx = 0 . |
|
(5) |
|||||||||
|
|
dt2 |
|
|
dt2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Уравнение (5) является дифференциальным уравнением колебаний арео- |
|||||||||||||||||||
метра в жидкости. Отсюда имеем |
d 2x |
+ |
ρgS |
x = 0 |
. Это динамическое уравнение |
||||||||||||||
dt2 |
m |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
гармонических |
колебаний, где |
2 |
ρgS |
→ ω = |
ρgS |
|
и период |
колебаний |
|||||||||||
ω = |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
0 |
m |
|
|
|
0 |
|
m |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ареометра равен |
T = 2π |
|
m |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
ρgS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
h |
|
x2 |
x0 |
|
x |
||
|
x1 |
x0 |
|
I |
II |
|
|
y |
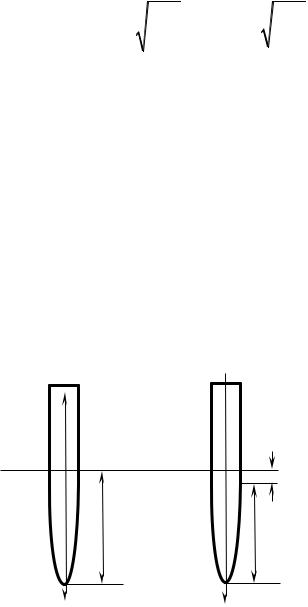
Задача 2. Пружина с коэффи- |
циентом жесткости k стоит на сто- |
|
|
ле. С высоты h , где h отсчитыва- |
|
ется от верхнего положения пру- |
|
жины до точки равновесия колеб- |
0 |
лющегося шарика, на пружину па- |
дает шарик массой m и прилипает |
|
x |
к пружине (абсолютно неупругий |
удар). Найти амплитуду колебаний |
|
|
шарика (h отсчитывается от верх- |
|
него края пружины). |
Решение. В момент соприкосновения шарика с пружиной образуется система шарик–пружина, где телом, совершающим колебания, является шарик. В начальный момент шарик обладает потенциальной энергий Eнач = mgh. Конеч-
ная энергия состоит из потенциальной энергии покоящегося шарика, в нижнем
его положении и энергии пружины E |
= |
kx2 |
− mgx , где x – максимальная де- |
|||||||||||
|
|
|
|
кон |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формация пружины, при которой скорость шарика равна нулю |
|
|
||||||||||||
E = E → |
kx2 |
− mgx = mgh |
→ |
kx2 |
− mgx − mgh = 0, |
|
|
|||||||
кон |
нач |
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
x = |
mg ± |
(mg)2 |
+ 2kmgh |
. |
|
|
|
|
||||
|
|
|
|
k |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шарик будет |
совершать колебания |
от |
x |
= |
mg + |
(mg)2 |
+ 2kmgh |
до |
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
51
|
|
mg − |
(mg)2 |
+ 2kmgh |
|
|
|
|
|
x + x |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||||
x |
= |
|
|
|
|
|
|
|
|
|
|
. Амплитуда колебаний шарика равна x |
= |
|
|
1 2 |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|
k |
|
|
|
ì àêñ |
|
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
|
= |
|
(mg)2 |
+ |
2kmgh |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
макс |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шарик будет колебаться с амплитудой x около положения равновесия.
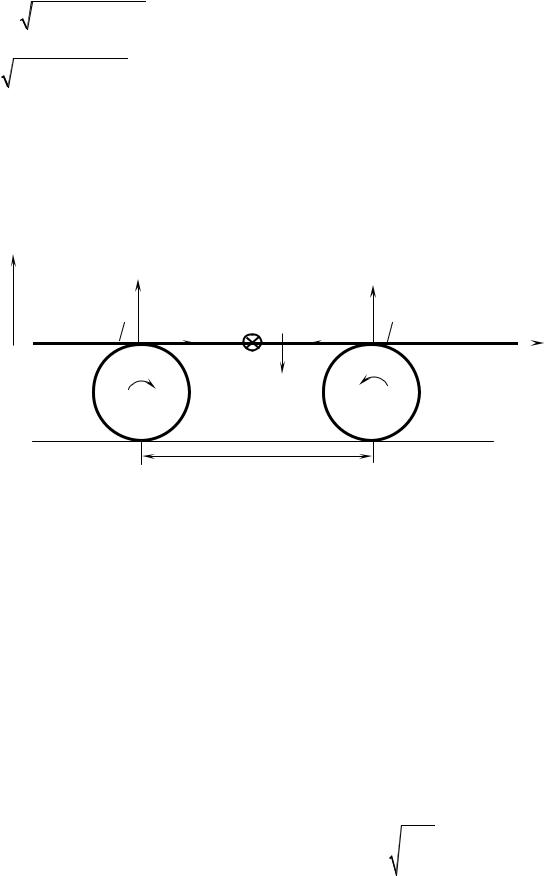
Задача 3. На два одинаковых диска 1 и 2 , расположенных на расстоянииl и вращающихся с одинаковыми угловыми скоростями навстречу друг друга, кладут длинный стержень. Коэффициент трения между дисками и стержнемµ. Найти пе-
риод малых колебаний стержня.
y |
|
N1 |
N2 |
− 2 |
|
•C |
|
|
2 |
|
|
|
Fтр1 z 0 xC Fтр2 |
|
|
|
x |
||
|
|
mg |
• |
||||
|
•ω |
ω |
|||||
Решение. Анализ условия задачи показывает, что на стержень действуют
силы: mg, N , N |
, F |
, F . Динамическое уравнение имеет вид |
1 тр12 |
тр2 |
|
ma = mg + N + N |
+ F + F |
|
|
|
||||
|
|
1 тр1 2 |
тр2 |
|
|
|
|
|
и проекция его на ось OX m |
d 2x |
= F |
− F |
= µ(N |
− N |
2 |
) . В этом уравнении |
|
|
dt2 |
тр1 |
|
тр2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
неизвестна разность (N1 − N2 ). Найдем эту разность, записав уравнение ди-
намики вращательного движения относительно оси, проходящей через середину стержня и перпендикулярной стержню, относительно которой происходят колебания стержня.
Тогда |
Iβ = N |
|
l |
+ mgx − N |
|
|
l |
. |
Стержень |
не |
совершает |
вращательного |
|||||||||||
|
|
|
2 2 |
||||||||||||||||||||
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
движения |
вокруг |
этой |
оси, |
|
т. |
е. |
β = 0 |
и |
|||||||||||||||
0 = N |
l |
+ mgx − N |
2 |
|
l |
→ N − N |
2 |
= − 2mgx . |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Дифференциальное уравнение колебаний стержня принимает вид |
|
||||||||||||||||||||||
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2x |
2µmg |
x → ω2 = |
2µg |
|
|
l |
|
|
|||||||||
|
|
|
m dt2 = − |
|
|
|
|
l |
→T |
= 2π |
|
. |
|
|
|||||||||
|
|
|
l |
|
|
|
2µg |
|
|
||||||||||||||
52
|
|
|
|
|
|
|
|
|
|
|
|
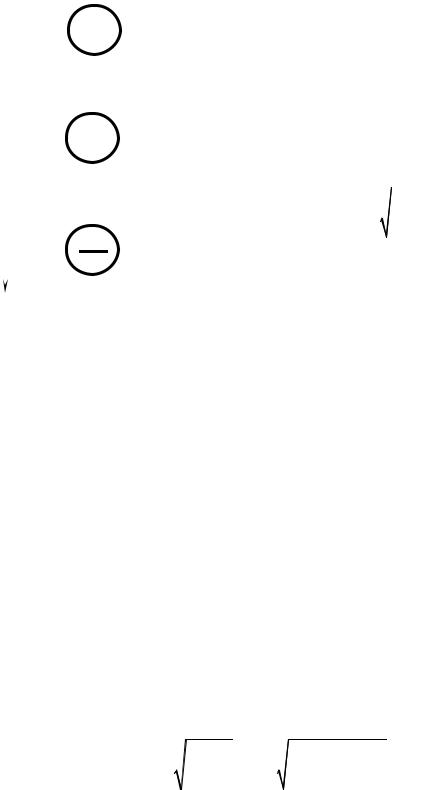
Задача 4. Физический маятник представ- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
ляет собой стержень массой M , длиной l , на |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
котором расположены три груза одинаковой |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
массы m . Грузы расположены от оси подвеса |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
на расстояниях 1 l, |
2 l и l . Определить период |
|||||
|
|
|
|
|
|
|
• |
|
m1 |
3 |
3 |
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
колебаний стержня относительно оси подвеса. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Решение. Физический маятник представ- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ляет собой систему, состоящую из четырех тел: |
||||||
2 |
|
|
|
|
|
|
• |
|
m2 |
|
стержень и три груза, подвешенных в различ- |
|||||||
3 |
|
|
|
|
|
|
|
|
ных местах стержня. Период колебаний такой |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
системы запишется в виде |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T = 2π |
I |
|
, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
m gr |
||||||
|
|
|
|
|
|
|
|
• |
|
m3 |
|
|
|
|
c |
0 |
|
|
|
|
|
|
|
|
|
|
где I − момент инерции физического маятника, |
||||||||||
|
|
|
|
|
|
|
||||||||||||
|
y |
|
|
|
|
|
|
|
представляющий собой сумму моментов инер- |
|||||||||
|
|
|
|
|
|
|
|
ции тел, входящих в систему. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
I = Iстерж + Iгр1 + Iгр2 + Iгр3. |
|
|
|
||||
Момент инерции стержня равен Iстерж = 13 Ml2 и моменты инерции грузов как материальных точек равны
|
l |
2 |
|
|
2 |
2 |
||||
Iгр1 |
= |
|
|
|
, Iгр2 |
= m |
|
l |
, Iгр3 = ml2 . |
|
3 |
3 |
|||||||||
|
|
|
|
|
|
|
||||
Момент инерции физического маятника равен |
I = Iст + Im |
|
+ Im |
+ Im . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ ml2 |
1 |
|
|
2 |
3 |
||
I = |
1 Ml2 |
+ 1 ml2 |
+ |
4 ml2 + ml2 → I = |
1 Ml2 |
(1+ 2 +3) = |
1 Ml2 |
+ 2ml2 = |
||||||||||||||||
|
|
3 |
|
|
9 |
|
|
|
9 |
|
|
|
|
|
|
3 |
3 |
|
|
3 |
|
|
|
|
= l |
2 |
|
1 |
M |
|
|
|
|
2 3M +14m |
. |
|
|
|
|
|
|
|
|
|
|
||||
|
|
3 |
+ 2m → I = l |
|
9 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Центр масс маятника находится по формуле |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
l |
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r = |
M |
|
+ 3 ml + |
3 ml + ml |
|
= l(3M +1 m2) = |
l(M + 4m) |
. |
|
|
|||||||||
|
|
|
|
|
|
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
0 |
|
|
M + m + m + m |
|
|
|
6(M −3m) 2(M +3m) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Масса всей системы равна mc = M + m + m + m = M +3m . |
|
|
|
|
|
|||||||||||||||||||
Период колебаний физического маятника будет равен |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
T = 2π |
|
I |
|
= |
|
2π l(3M +14m) . |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
m gr |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
g(M + 4m) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
0 |
c |
|
|
|
|
|
|
|
|
|
|
|
|
53