

6____2004
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
j |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
|
|
Z1 |
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
Z1 |
|
|
|
|
|
X1 |
Y1 |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[a,b ]= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
Y1 |
|
|
Z1 |
|
=i |
− |
j |
|
+k |
. |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y Z |
2 |
|
|
X |
2 |
|
|
Z |
2 |
|
X |
2 |
|
|
Y |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
Y2 |
|
Z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Доказательство. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
взаимно ортогональны и образуют |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, k |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
Учитывая, что базисные векторы i |
|
j |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
правую |
|
|
|
|
|
|
|
|
|
тройку |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
= |
|
|
|
|
|
, |
имеем |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
j |
|
, k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
j |
|
|
k |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
[i |
|
|
] |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ |
|
|
|
, |
|
|
|
|
|
]= [k |
|
|
|
]= 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
, i |
|
i |
|
|
i |
|
|
sin 0 = 1 1 0 = 0 , |
|
|
|
j |
j |
, k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.8) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
[ |
|
|
|
]= k |
, |
|
[ |
|
|
, |
|
|
]= −k |
, [i |
|
|
]= − |
|
|
, [k |
|
|
|
|
|
|
|
|
|
|
] = |
|
|
, |
|
|
[ |
|
|
|
|
|
|
]= i |
, [k |
, |
|
|
|
]= −i |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
, |
|
|
, k |
|
|
, k |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
i |
j |
j |
i |
j |
, i |
j |
|
|
j |
j |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Перемножая векторно a |
и |
|
|
|
, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
[a, |
|
]= X1 X 2 [i |
|
|
]+ X1Y2 [i |
, |
|
]+ X1Z2 [i |
|
|
|
|
]+ Y1 X 2 |
[ |
|
|
|
|
]+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
b |
, k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
,i |
j |
j |
,i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
+ Y1Y3 [ |
|
, |
|
]+ Y1Z2 [ |
|
|
|
]+ Z1 X 2 [k |
|
|
]+ Z1Y2 |
[k |
, |
|
]+ Z1Z2 [k |
|
|
]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
, k |
, k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
j |
j |
j |
,i |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Из этого равенства и соотношений (1.8) получаем разложение (1.7). |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Следствие. |
|
Если два вектора a = {X 1 ,Y1 , Z 1 } и |
|
= {X 2 ,Y2 , Z 2 } коллинеарны, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
b |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
то их координаты пропорциональны: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
|
= |
|
|
Y1 |
|
= |
|
|
|
Z1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
2 |
|
|
|
Y |
|
|
|
Z |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Доказательство. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
Из равенства нулю векторного произведения и из (1.7) имеем |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 1Y2 − X 2Y1 = 0, Z1 X 2 − Z 2 X 1 = 0, Y1 Z 2 −Y2 Z1 = 0 . |
□ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3.7. Смешанное произведение трех векторов |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Пусть даны три вектора |
|
|
|
a , |
|
, |
c |
. Если вектор |
|
a |
|
|
векторно умножается на |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
b |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
вектор b , а затем полученный вектор [a,b ] скалярно умножается на вектор c ,
то в результате получается |
число ([a , |
|
], |
c |
), |
называемое |
смешанным |
||||||||||||
b |
|||||||||||||||||||
произведением векторов a, |
|
, c и обозначаемое (a, |
|
, c) . |
|
|
|
||||||||||||
b |
b |
|
|
|
|||||||||||||||
|
|
Геометрический смысл смешанного произведения трех векторов |
|||||||||||||||||
|
|
Смешанное |
произведение |
|
|
( a , |
|
, |
c |
) |
равно |
объему |
|||||||
|
|
|
b |
||||||||||||||||
c |
|
параллепипеда, построенного |
|
на |
приведенных |
к |
общему |
||||||||||||
|
|
|
|||||||||||||||||
b |
|
|
|
|
, взятому со знаком плюс, если тройка |
|
началу векторах a , b , |
c |
|||||
|
||||||
|
a |
|||||
a , b , c правая, и со знаком минус, если тройка a , b , c левая. Если же векторы компланарны, то([a , b ], c )= 0 .
Из определения видно, что ([a , b ], c )= (a , [b , c ]). Этим объясняется, что можно записывать смешанное произведение трех векторов a,b , c просто в виде
(a , b , c )= ([a , b ], c ), не указывая какие именно два вектора перемножаются векторно.
Следствие 1. Необходимым и достаточным условием компланарности трех векторов является равенство нулю их смешанного произведения.
Следствие 2. (a , b , c )= −(b , a , c ).
1.3.8. Выражение смешанного произведения в декартовых координатах
Теорема 1.13. |
Если три вектора |
a |
|
|
|
|
определены своими декартовыми |
||||
, b |
, |
c |
|||||||||
координатами |
a = {X 1 ,Y1 , Z1 }, |
|
={X 2 ,Y2 ,Z 2 }, |
|
= {X 3 ,Y3 , Z 3 }, то смешанное |
||||||
b |
c |
||||||||||
произведение (a,b , c) равно определителю, строки которого соответственно равны координатам перемножаемых векторов:
(a, |
|
,c )= |
X1 |
Y1 |
Z1 |
|
|
X 2 |
Y2 |
Z2 |
. |
||
b |
||||||
|
|
|
X 3 |
Y3 |
Z3 |
|
Доказательство. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Так как |
|
[a, |
|
]= |
{Y1Z2 |
−Y2 Z1 , Z1 X 2 − Z2 X1 , |
X1Y2 |
− X 2Y1}, c={X 3 ,Y3 ,Z3 }, то скалярное |
|||||||||||||||||||||||
b |
|||||||||||||||||||||||||||||||
произведение этих векторов равно |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
(a, |
|
,c)=([a, |
|
],c)= X3 (Y1Z2 −Y2Z1 )+Y3 |
(X2Z1 − X1Z2 )+Z3 (X1Y2 − X2Y1 )= |
||||||||||||||||||||||||||
b |
b |
||||||||||||||||||||||||||||||
|
|
|
|
Y1 |
|
Z1 |
|
|
X1 |
Z1 |
|
|
|
X1 |
Y1 |
|
|
X1 |
|
Y1 |
Z1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
= X |
|
|
|
−Y |
|
+ Z |
|
|
= |
X |
|
|
Y Z |
|
|
. |
|||||||||||||||
|
|
3 |
Y Z |
2 |
3 |
X |
2 |
Z |
2 |
|
|
3 |
X |
2 |
Y |
|
|
|
2 |
2 |
|
2 |
|
|
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
X 3 |
|
Y3 |
Z3 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
□ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следствие. |
|
Необходимым и достаточным условием компланарности трех |
|||||||||||||||||||||||||||||
векторов a = {X 1 , Y1 , Z 1 |
}, |
|
= {X 2 ,Y 2 ,Z 2 }, |
|
= {X 3 , Y3 , Z 3 } является равенство |
||||||||||||||||||||||||||
b |
c |
||||||||||||||||||||||||||||||
нулю определителя, строками которого являются координаты этих векторов:
X1 |
Y1 |
Z1 |
|
X 2 |
Y2 |
Z 2 |
= 0 . |
X 3 |
Y3 |
Z3 |
|
32

1.4. Преобразование системы координат
1.4.1. Параллельный перенос
Пусть задана декартова система координат (XOY). Введем новую систему координат (X’O’Y’) с началом в точке O’(x0 , y0), где x0 , y0 – координаты точки O’ в системе XOY, а оси O’X’ и O’Y’ параллельны осям OX и OY соответственно.
Возьмем на плоскости точку M. Обозначим ее координаты в системе XOY через (x, y), а в системе X’O’Y’ через (x’,y’). Найдем соотношение между этими координатами. Для этого проведем векторы OD' , O' M и OM . По правилу сложения векторов получаем
OM = OO' +O' M ,
откуда, записывая по столбцам координаты векторов, имеем
x |
x |
0 |
|
x' |
, |
||
|
|
= |
|
+ |
|
||
|
|
|
|
|
|
|
|
y |
y0 |
|
y' |
|
|||
или, записывая это равенство покомпонентно, получим систему
x = x0 + x ',y = y0 + y ',
задающую формулы преобразования координат при параллельном переносе.
1.4.2. Поворот
Пусть задана система координат (XOY). Направляющие векторы осей координат обозначим соответственно e1 и e2 . Введем новую систему
координат (X’O’Y’), получающуюся из старой поворотом осей на угол φ. Единичные векторы новой системы координат обозначим e1 ' и e2 ' .
33

Возьмем на плоскости произвольную точку M. Обозначим ее координаты в системе XOY через (x, y), а в системе X’O’Y’ через (x’, y’), и найдем соотношение между ними.
Так как координаты точки M совпадают с координатами вектора OM , воспользуемся разложением вектора по базису (e1 , e2 ) и базису (e1 ', e2 ') :
|
|
|
|
OM |
= xe1 + ye2 |
= x' e1 '+ y' e2 ' . |
(1.9) |
||||||
Выразим координаты векторов e1 ' , |
e2 ' в базисе |
(e1 , e2 ) , пользуясь тем, что |
|||||||||||
| |
e1 ' | = | |
e |
2 ' | = 1 . Имеем: |
cosϕ |
, |
|
|
−sinϕ |
, т.е. |
||||
|
|
|
|
|
e1 |
e2 |
|||||||
|
|
|
|
|
= |
|
= |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sinϕ |
|
|
|
cosϕ |
|
|
|
e1 ' = e1 cosϕ + e2 sinϕ,e2 ' = −e1 sinϕ + e2 cosϕ.
Подставим в формулу (1.9):
xe1 + ye2 = x'(e1 cosϕ +e2 sinϕ) + y'(−e1 sinϕ +e2 cosϕ) ,
откуда, группируя коэффициенты при e1 и e2 в правой части равенства, получаем
xe1 + ye2 = (x'cosϕ − y'sinϕ)e1 +(x'sinϕ + y'cosϕ)e2 .
Приравниваем коэффициенты при e1 и e2 и получаем систему
x = x'cosϕ − y'sinϕ,y = x'sinϕ + y'cosϕ,
или, записывая эту систему в матричной форме,
x |
cosϕ |
|
−sinϕ x' |
, где |
||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
y |
sinϕ |
|
cosϕ y' |
|
||
cosϕ |
−sinϕ |
– матрица поворота. |
||||
P = |
|
|
|
|||
|
|
cosϕ |
|
|
|
|
sin ϕ |
|
|
|
|
||
Замечание.
Матрица поворота является частным случаем матрицы перехода от одной системы координат к другой. Эта матрица составлена из координат новых базисных векторов в старом базисе, записанных по столбцам.
34

Тема 2. Прямая на плоскости
2.1. Исследование общего уравнения первой степени
Общее уравнение прямой на плоскости имеет вид:
Ax + By +C = 0 , A2 + B2 ≠ 0 .
Можно показать, что общее уравнение первой степени
Ax + By +C = 0
задает прямую линию, и любая прямая может быть задана таким уравнением. Рассмотрим случаи, когда один или два коэффициента уравнения обращаются в нуль.
1. C =0. В этом случае уравнение имеет вид
Ax + By = 0
изадает прямую, проходящую через начало координат.
2.A =0. Уравнение имеет вид
By +C = 0
или
y = −BС =b.
Прямая расположена параллельно оси OX на расстоянии | b |от нее.
3.B = 0. В этом случае прямая линия расположена параллельно оси OY .
4.C = 0, B = 0. Уравнение принимает вид
Ax = 0 или x =0
и задает ось OY .
5. C = 0, A =0 . Уравнение принимает вид By = 0 или y = 0 и задает ось OX .
2.2. Уравнение прямой линии с угловым коэффициентом
Решим уравнение первой степени |
Ax + By +C = 0 относительно y в |
|||||
случае, когда B ≠ 0 : |
|
|
|
x2 |
≤ x − C . |
|
|
|
|
y = − |
|||
|
|
|
a2 |
|||
|
A |
|
|
B |
||
Положим здесь k = − |
, |
b = −C . Уравнение принимает вид |
||||
B |
||||||
|
|
B |
|
|||
y = kx +b ,
35

оно называется уравнением прямой с угловым коэффициентом.
В случае B =0 уравнение имеет вид
Ax +C = 0 ,
Откуда
x = −AC = a .
Определим геометрический смысл постоянных k и b . y
b
x
0
рис. 2.1
Если положить x =0 , то y = b . Другими словами, b есть отрезок,
отсекаемый данной прямой на оси ординат.
Чтобы выяснить геометрический смысл k , перенесем начало координат в точку (0,b) , сохраняя направление осей.
Формулы преобразования координат будут иметь вид x = x′, y = y′+b .
Данное уравнение преобразуется к виду
y′+b = kx′+b .
Или
y′= kx′,
Откуда
k = xy′′ .
Выбирая произвольную точку M (x′, y′) на прямой линии, видим, что ϕ - это
угол между положительным направлением оси OX и данной прямой, отсчитываемый против движения часовой стрелки.
Следовательно, k =tgϕ, т. е. k равно тангенсу угла между положительным
направлением оси абсцисс и данной прямой, отсчитываемого от оси OX против движения часовой стрелки. Число k называют угловым коэффициентом данной прямой.
36

Пример 1.
Составить уравнение прямой линии, отсекающей на оси ординат отрезок, равный 2, и наклоненной к оси абсцисс под углом в 45 0 .
Здесь k = tg45o =1, b = ±2 .
Следовательно, искомое уравнение имеет вид: y = x ± 2 .
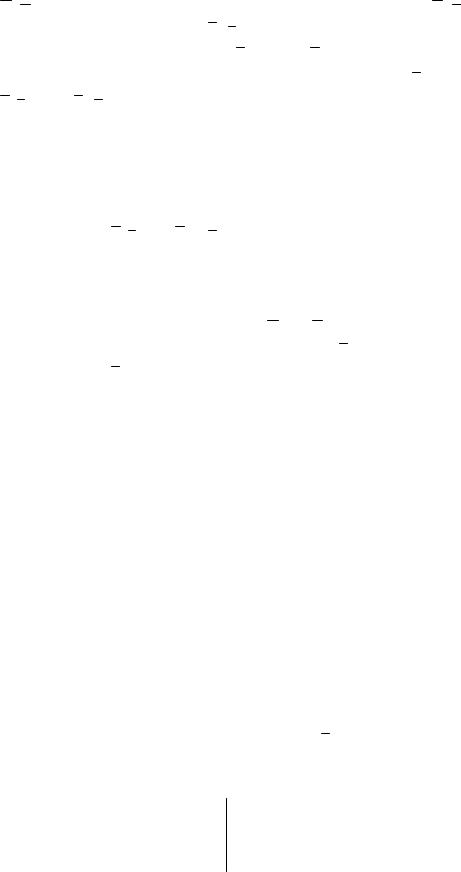
2.3. Угол между двумя прямыми
Пусть две прямые заданы уравнениями
y = kx +b и y′= kx′+b .
Обозначая через α угол между этими прямыми, видим, что
α =ϕ′−ϕ ,
где ϕ и ϕ′ – углы наклона прямых к оси абсцисс.
Заметив, что k =tgϕ, k′=tgϕ′, определим tgα . Из тригонометрии известно, что
tgα = tg(ϕ'−ϕ) = |
|
tgϕ'−tgϕ |
. |
|
||
|
|
|
||||
|
1 + tgϕ'tgϕ |
|
||||
Заменяя в последней формуле tgϕ и tgϕ′ на k , |
k′, имеем окончательно |
|
||||
tg α = |
|
k '−k |
|
. |
|
(2.1) |
1 + kk ' |
|
|||||
|
|
|
|
|||
Пример 2.
Найти угол между прямыми: y – 2x – 5=0, 3x + y – 8 = 0.
Угловые коэффициенты данных прямых: k = 2, k = – 3. Применяя формулу (2.1), получим
tgα = 1−−32−*23 =1.
Откуда α = 45 0 .
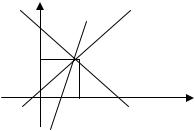
2.4. Условия параллельности и перпендикулярности двух прямых
Если прямые параллельны, то угол между ними равен нулю, и обратно, если α = 0, то прямые параллельны. В этом случае формула (2.1) обращается в равенство:
tg 0 = |
k '−k |
|
1 + kk ' |
||
|
Или
37

0 = 1k+'−kkk ' ,
откуда
k′− k =0, k′= k.
Это и есть условие параллельности прямых.
Случай перпендикулярности прямых получится из формулы (2.1) при α =π2 :
k '−k |
= tg |
π |
(= ∞) , |
|
1 + kk ' |
2 |
|||
|
|
откуда условие перпендикулярности прямых принимает вид:
1 + k k′=0 или k k′= −1.
Пример 3.
Являются ли прямые 2x – 3y + 1 = 0 и -6x + 9y – 5 = 0 параллельными?
Угловые коэффициенты этих прямых равны:
k = 23 , k′= 64 = 23 ,
т. е. условие параллельности выполнено.
Следовательно, прямые 2x – 3y + 1 = 0, -6x + 9y – 5 = 0 параллельны.
Пример 4.
При каком значении k уравнение
y = kx + 1
изображает прямую, перпендикулярную прямой y = 2x – 1?
Угловой коэффициент второй прямой k′ = 2. Условие перпендикулярности дает 2k = -1, откуда
k = − 12 .
2.5. Уравнение прямой, проходящей через две данные точки
Пусть даны две точки A(x′, y′) и B(x′′, y′′) . Составим уравнение пучка прямых линий, проходящих через точку A(x′, y′) :
38
y'
x '
рис. 2.2
y − y ' = k ( x − x ' ), |
(2.2) |
где k – произвольный параметр пучка. Чтобы выделить из этого пучка прямую линию, проходящую через точку B(x′′, y′′) , нужно, чтобы
координаты этой точки удовлетворяли уравнению (2.2):
y ' '− y ' = k ( x ' '− x ' ), |
(2.2′) |
Из равенства (2.2′) нужно определить значение параметра k и внести это значение в уравнение (2.2′).
В результате получим:
y − y' |
= |
x − x' |
. |
(2.3) |
y''−y' |
|
|||
|
x' '−x' |
|
||
Это уравнение задает прямую линию, проходящую через точки A(x′, y′) и
B(x′′, y′′) .
Пример 5.
Составить уравнение прямой линии, проходящей через точки A(1,2) и В(-1, 1).
Подставляя в уравнение (2.3) |
x′ = 1, |
y′ = 2, |
x′′= - 1, y′′ = 1 получим: |
||||||||||
|
y −2 |
= |
x −1 |
|
|
, или |
|
y −2 |
= |
x −1 |
, или |
y – 2 = |
x – 1, |
|
1−2 |
−1 −1 |
1 |
|
|||||||||
|
|
|
2 |
|
|
|
|||||||
откуда
x – y + 1 = 0.
39
2.6. Нормальное уравнение прямой линии
Прямая линия на плоскости определена, если заданы ее расстояние от начала координат p , т.е. длина перпендикуляра, опущенного из начала
координат на прямую, и угол α между положительным направлением оси OX и направлением этого перпендикуляра (рис. 2.3).
P |
y M |
|
P |
||
0 α |
|
x |
|
||
|
|
|
R |
||
рис. 2.3
Построим на чертеже координаты произвольной точки M прямой линии: OR = x , MR = y . Рассмотрим ломаную линию ORMP . Возьмем ее проекцию
на OP . Заметим, что
пр. (ORMP ) = пр. (OP ). |
(2.4) |
С другой стороны, проекция ломаной линии равна сумме проекций ее звеньев, следовательно, равенство (2.4) перепишется в виде:
пр. (OR ) + пр. ( RM ) + пр. ( MP ) = пр. (OP ). |
(2.4′) |
Так как проекция отрезка равна самому отрезку, умноженному на косинус угла между положительными направлениями оси проекции и той прямой, на которой лежит отрезок, то
пр. (OR ) = x cosα ,
пр. ( RM ) = y cos(90o −α) = y sinα ,
пр. ( MP ) = 0, пр. (OP ) = p .
Подставляя эти значения в равенство (2.4′), получим:
xcosα + ysinα = p,
(2.5)
xcosα + ysinα − p =0.
40