

98 5 Saturation Arithmetic
end
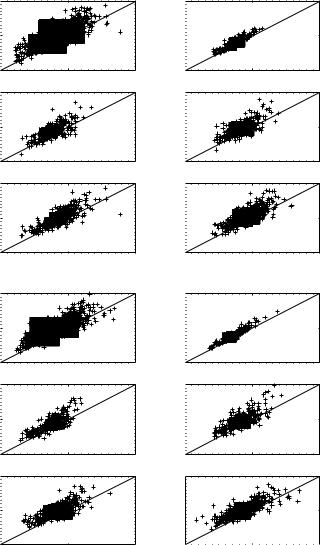
5.4.6 Error estimation results
This section presents some results from using the error model discussed thus far to predict saturation error variance. Approximately 6000 IIR filters have been generated, each filter having between second and tenth order. The feedback coe cients are generated by randomly choosing complex conjugate pole locations in the range 0 < |z| < 0.998 and 0 < arg(z) < π (uniformly distributed), and the feed-forward coe cients are generated by randomly distributing them between 0 and 1 (uniformly distributed). 1 scaling is then applied to each filter, and the binary point locations are decided by choosing either those through 1 scaling or one or two bits beneath this value, each location independently of the other. Probabilities are skewed such that there is a mean of two saturation nonlinearities in each section, in order to agree with typical synthesized circuits. The choice of saturator degree is decided with uniformly distributed probability and independently of all other saturation locations. The predicted error variance is then compared to the observed variance arrived at through a bit-true simulation of the system. Two types of input data are used: independent identically distributed Gaussian input samples, and real speech data [FRE93].
Fig. 5.13 presents several plots of the error bound, derived through the technique presented in this chapter, against a simulation run. Fig. 5.14 presents the data as a histogram of over-estimation ratios, and also illustrates how this histogram changes with the order of the filter modelled for the iid case. It is clear that for the large majority of designs the Cauchy-Schwartz bound provides a value between 0dB and 50dB greater than the simulated result. Although both the slackness of the bound derived, and the mismatch between the saturated Gaussian model and post-addition pdf grow with the order of the filter, it is not a rapid growth. From fourth to tenth order the bulk of overestimation ratios lie in the same range, with little change in the spread of the distribution. Recall that the error estimation is for average-case behaviour, and so the bound is on the expected error variance, not the error variance for each specific case. In addition the bound is only exact if the standard deviations of the injected errors are known exactly, whereas in reality they are estimated through modelling signals as saturated Gaussians, as discussed previously. There is some mismatch between the input probability density function and the Gaussian assumption for speech, leading to marginally worse performance in the speech case (speech pdf falls o as exp(−λ1|x|) rather than the Gaussian exp(−λ2x2) [P50]).
Whether the noise model is su cient for optimization purposes can only be measured by the quality of the circuits produced by the optimization procedure, which will be discussed in the following section.
5.4 Noise Model |
99 |
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
||||||
all filters (speech input)
100 1010 4th order filters
100 1010 8th order filters
100 1010 simulated error power
all filters (iid Gaussian input)
100 1010 4th order filters
100 1010 8th order filters
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
bound |
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
error |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
10−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2nd order filters
100 1010 6th order filters
100 1010 10th order filters
100 1010 simulated error power
2nd order filters
100 1010 6th order filters
100 1010 10th order filters
bound |
0 |
|
10 |
||
error |
||
|
|
|
10−10 |
|
|
|
|
100 |
1010 |
10−10 |
100 |
1010 |
||
simulated error power |
|
|
|
simulated error power |
|
|
Fig. 5.13. Saturation error model: estimated against simulated error variance for (upper) speech input and (lower) iid Gaussian input

100 5 Saturation Arithmetic
bound−to−sim error ratio (dBs) for speech input
150 |
|
|
|
|
|
|
100 |
|
|
|
|
|
|
50 |
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
||||||
|
|
bound−to−sim error ratio (dBs) for iid Gaussian input |
|
|
||
150 |
|
|
|
|
|
|
100 |
|
|
|
|
|
|
50 |
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
||||||
2nd order filters
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
frequency |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−100 |
−50 |
0 |
|
50 |
100 |
150 |
|||||
−150 |
|
||||||||||||
60 |
|
|
|
6th order filters |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
frequency 20 |
|
|
|
|
|
|
|
|
|
|
|
||
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
10th order filters
80
60 |
|
|
|
|
|
|
frequency |
|
|
|
|
|
|
40 |
|
|
|
|
|
|
20 |
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
||||||
bound−to−sim error ratio (dB) for iid Gaussian |
||||||
4th order filters
50
40
frequency 30 20
10 |
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
8th order filters
80
60 |
|
|
|
|
|
|
frequency |
|
|
|
|
|
|
40 |
|
|
|
|
|
|
20 |
|
|
|
|
|
|
0 |
−100 |
−50 |
0 |
50 |
100 |
150 |
−150 |
||||||
bound−to−sim error ratio (dB) for iid Gaussian |
||||||
Fig. 5.14. Overestimation ratios for saturation error model (upper) over all filter orders and (lower) for specific filter orders