

Михеев Исполнителные устройства автоматических 2008
.pdfчто регулировочная характеристика всего тиристорного усилителя
(БУ + ТБ) является линейной: Uн.ср=kUу, где k = |
2U m |
– общий |
πU y max |
||
коэффициент передачи ТУ. |
|
|
Рис. 4.49
Будем считать, что ТУ питается от сети переменного тока Uпит=Umsinωt. Это питание дифференцируется и напряжение U1cosωt подается на компаратор Комп1. Кроме него на компаратор подаются постоянное напряжение U1, которое может меняться в диапазоне ±2U1. Если Uy-U1-U1cosωt>0, на выходе компаратора будет высокий потенциал, если – меньше 0, то на выходе Комп1
171

будет 0 (рис. 4.49). Передний фронт выходных импульсов Комп1
соответствует значению α = arccos(U y −1) .
U1
Эти импульсы дифференцируются и с помощью Ф1 формируются короткие импульсы, поступающие на логическую схему, которая определяет на какой симмистор их направить. Если Uу > 0, то схема определения знака “Знак” вырабатывает высокий уровень сигнала, соответствующий логической “1”. В этом случае импульс появится на Вых.1 в момент ωt = α. Второй импульс, соответствующий моменту ωt = π+α вырабатывается во втором канале Комп2, Ф2 и т.д. На Комп2 подается напряжение –U1cosωt (показано на диаграмме пунктиром).
Второй сигнал работает аналогично первому только с той разницей, что управляющие импульсы будут появляться в момент ωt = π+α. Они показаны пунктиром. Таким образом, при положительной Uу управляющий импульс подается на тот симмистор, на который подается положительная полуволна питания.
В том случае, если Uy<0, то схема формирования управляющих импульсов работает так же, так как на компараторы подается |Uy| и они не почувствуют изменение знака. Схема определения знака “Знак” на отрицательный управляющий сигнал выдает низкий уровень сигнала, соответствующий логическому “0”. В этом случае логическая схема направит импульс α на выход 2, а импульс (π+α)
– на выход 1, т.е. на симмисторы, на которых будет отрицательная полуволна питающего напряжения. Напряжение на выходе ТУ также будет отрицательным. Таким образом, схема отпределения момента появления управляющего импульса работает одинаково при положительной и отрицательной полярности управляющего напряжения Uy, а логическая схема при изменении знака Uy меняет управляющие импульсы местами.
Описанная схема с минимальными изменениями может быть использована в однофазном реверсивным ТУ. Для этого нужно лишь при Uy > 0 импульсы управления подавать на один симмистор (Вых1, например), а при Uу < 0 – на другой (Вых2, например).
172
5. ИСПОЛНИТЕЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
5.1. Классификация электрических двигателей
Электрические двигатели по своему функциональному назначению можно разделить на две группы.
1.Исполнительные двигатели, которые используются для выполнения функциональных преобразований. Подводимый к ним электрический сигнал преобразуется в угловую скорость или перемещение вала.
2.Вспомогательные двигатели, в которых скорость вращения вала остается постоянной. Такие двигатели используются как источники механической энергии в различных механизмах (транспортеры, лифты и т.п.).
Требования, предъявляемые к этим двум группам двигателей, могут существенно отличаться. Ряд требований может быть общим. С точки зрения использования в системах автоматического регулирования (САР) нас будут интересовать исполнительные двигатели. Основными требованиями, предъявляемыми к исполнительным двигателям, являются следующие: хорошая управляемость во всем диапазоне рабочих скоростей вращения (от 0 до номинальной угловой скорости), причем желательно иметь линейные регулировочные характеристики (зависимость угловой скорости от сигнала управления); стабильность механических характеристик и устойчивость работы в требуемом диапазоне моментов нагрузки на валу двигателя; отсутствие самохода (наличие момента вращения двигателя при сигнале управления равном нулю); высокое быстродействие; стабильный коэффициент преобразования.
Такие требования, как высокий коэффициент полезного действия, технологичность конструкции, долговечность, надежность, малые габариты и вес являются общими для обеих групп двигателей.
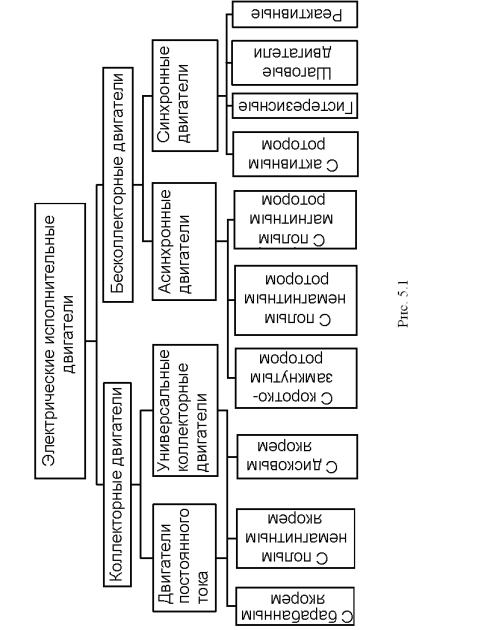
По конструкции и принципу действия электрические исполнительные двигатели (ИД) подразделяются на коллекторные
ибесколлекторные.
173
Коллекторные ИД по подводимому к ним электрическому (управляющему) сигналу можно разделить на двигатели постоянного тока и универсальные двигатели.
По конструктивным особенностям коллекторные двигатели подразделяются на двигатели: с барабанным якорем; с полым немагнитным якорем; с дисковым якорем.
Бесколлекторные двигатели являются в основном двигателями переменного тока, однако это деление весьма условно. Так, среди двигателей постоянного тока можно выделить бесколлекторные двигатели, в которых коллектор заменен электронным коммутатором. А среди двигателей переменного тока можно отметить синхронные двигатели с активным ротором, у которых напряжение возбуждения на ротор подается через коллекторные кольца.
Асинхронные двигатели (АСД) являются двигателями переменного тока и различаются в основном конструкцией ротора. По этому признаку их можно подразделить на следующие группы:
АСД с короткозамкнутым ротором типа «беличья клетка»; АСД с полным немагнитным ротором; АСД с полным магнитным ротором.
Синхронные двигатели (СД) также являются двигателями переменного тока и по принципу действия подразделяются на двигатели с активным ротором, реактивные и гистерезисные.
К синхронным двигателям следует отнести шаговые двигатели (ШД), которые являются преобразователями дискретного действия. Перемещение вала ШД на определенный шаг соответствует приходу единицы управляющего сигнала (одному импульсу).
На рис.5.1 приведена схема классификации электрических двигателей в соответствии с вышесказанным.
174
5.2. Исполнительные двигатели постоянного тока (ИДПТ)
5.2.1.Конструкция и принцип действия
ИДПТ могут быть с независимым электромагнитным возбуждением (имеется обмотка возбуждения для создания магнитного поля) или с возбуждением от постоянных магнитов. Якорь двигателя выполняется различным образом. ИДПТ с барабанным якорем представляет собой классическую машину постоянного тока [1, 2]. Такая машина является обратимым преобразователем, т. е. может работать и как генератор, и как двигатель.
Рис. 5.2 поясняет работу простейшей коллекторной машины. На обмотку возбуждения 1 подается постоянное напряжение UВ. Ток, протекающий по обмотке, создает магнитное поле между полюсами 2. Магнитное поле замыкается по станине 3, как показано на рисунке. Предположим, что якорь машины состоит из сердечника 7 и одной рамки 4, концы которой выведены на коллектор 5, представляющий собой два медных полукольца, закрепленных на якоре. К коллектору прикасаются неподвижные угольные щетки 6, которые обеспечивают подачу на рамку постоянного напряжения UЯ. Ток, протекающий по рамке якоря, взаимодействует с магнитным полем, создавая вращающий момент, как это показано на рис.5.2, б. Вращающий момент зависит от положения рамки. В вертикальном положении рамки (плоскость рамки совпадает с направлением силовых линий магнитного поля) он максимален, в горизонтальном − равен нулю. Рамка, вращаясь, переходит из положения I в положение III, когда щетки переходят на противоположные полукольца коллектора, изменяя тем самым полярность приложенного к рамке напряжения UЯ (см. рис.5.2). При этом изменяется направление сил, приложенных к каждому горизонтальному проводнику рамки, что позволяет сохранить направление момента (на рисунке − по часовой стрелке).
Двигатель с одной рамкой (катушкой) принципиально работоспособен, но его вращающий момент изменяется при вращении якоря от 0 до некоторого максимального значения. Поэтому в реальном якоре имеется несколько секций, соединенных
176

Рис. 5.2
таким образом, чтобы вращающий момент создавался одновременно всеми секциями. Конструкция якоря с секционной обмоткой была описана в главе 2 при рассмотрении ГНВ. Конструкция якоря двигателя постоянного тока принципиально ничем не отличается от якоря ГНВ.
177
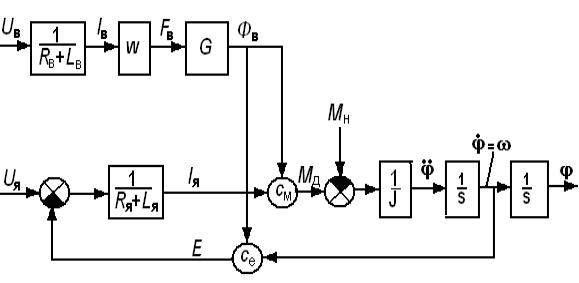
5.2.2. Структурная схема
Структурная схема двигателя представлена на рис. 5.3. Она отражает математические соотношения физических законов, описывающих работу двигателя. На схеме приняты следующие обозначения:
UB − напряжение на обмотке возбуждения (ОВ); RВ − сопротивление ОВ;
LВ − индуктивность ОВ;
IВ − ток в ОВ;
wВ − число витков ОВ;
FВ − намагничивающая сила ОВ;
G − магнитная проводимость; ФВ− магнитный поток ОВ;
cМ, cЕ − коэффициенты пропорциональности, зависящие от конструктивных параметров двигателя;
MД − вращающий момент, развиваемый двигателем; MН − момент нагрузки;
J − момент инерции якоря;  − угловое ускорение якоря;
− угловое ускорение якоря;
ω − угловая скорость вращения якоря;
 − угловое перемещение якоря; UЯ − напряжение на якоре;
− угловое перемещение якоря; UЯ − напряжение на якоре;
RЯ − сопротивление обмотки якоря; LЯ − индуктивность якоря;
IЯ − ток якоря;
E − ЭДС якоря;
s − комплексная переменная в преобразовании Лапласа.
При подаче напряжения UВ на обмотку возбуждения по ней
протекает ток I B = |
U B |
. Очевидно, что данное соотношение |
|
RB + sLB |
|||
|
|
определяет не сам ток в обмотке, а его изображение по Лапласу, так как в индуктивно-резистивной цепи ток и напряжение связаны дифференциальным уравнением. Это же замечание относится к соотношению между током якоря IЯ и напряжением на якоре UЯ.
178
179
Рис. 5.3
Блоки с коэффициентом 1s означают условную операцию
интегрирования, которая используется для того, чтобы получить все три параметра движения вала двигателя: ускорение  , скорость
, скорость
 = ω и угол поворота
= ω и угол поворота  . Таким образом, приведенная структурная схема в динамическом режиме определяет связи не между физическими величинами (функциями), а между их изображениями. В статическом режиме структурная схема определяет связи между самими физическими величинами, нужно только принять s = 0.
. Таким образом, приведенная структурная схема в динамическом режиме определяет связи не между физическими величинами (функциями), а между их изображениями. В статическом режиме структурная схема определяет связи между самими физическими величинами, нужно только принять s = 0.
Ток якоря IЯ взаимодействует с магнитным потоком возбуждения ФВ. В результате на якорь действует вращающий момент MД = cМФВIЯ. При наличии момента нагрузки MН якорь
будет испытывать ускорение ϕ = |
M Д − M H |
. При вращении якоря |
|
J |
|||
|
|
в магнитном поле в обмотках якоря возникает электродвижущая сила E = cЕ ФВ ω. Она направлена навстречу UЯ, поэтому ток в якоре будет определяться разностью напряжений UЯ − E. При увеличении скорости вращения ω возрастает ЭДС якоря, падает IЯ и, следовательно, MД. Возрастание ω будет продолжаться до тех пор, пока разность (MД − MН ) не станет равной нулю. Тогда ϕ = 0 и установится стабильная скорость вращения ω, т.е. наступит статический режим.
5.2.3.Способы управления ИДПТ
Всоответствии с общей теорией преобразователей, если
выходной величиной ИДПТ является скорость вращения ω, то нагрузочным параметром будет момент нагрузки MН. В качестве входной (управляющей) величины могут выступать напряжение якоря UЯ, сопротивление в цепи якоря RЯ, напряжение возбуждения UВ и сопротивление в цепи возбуждения RВ. Объединим их под общим обозначением AУ. Тогда основными статическими характеристиками двигателя будут следующие:
регулировочная характеристика − ω = f ( AУ ) при MН = const; токовая характеристика − IЯ = f ( AУ ) при МН = const;
180