

Михеев Исполнителные устройства автоматических 2008
.pdfполучается почти таким же, как у ИДПТ, за исключением некоторой нелинейности.
Рис. 5.59
Величина Sкр пропорциональна активному сопротивлению ротора (5.51).
В качестве исполнительных АСД используются двигатели с большим Sкр = 2÷4. Для АСД с Sкр > 1 пусковой момент максимален в рабочем диапазоне скоростей (как у ИДПТ).
5.3.5. Методы управления АСД при круговом поле
Амплитудный метод управления. При этом методе управления изменяется амплитуда напряжения на всех фазах двигателя одновременно. При этом выполняются все условия существования кругового поля (5.47). Схема управления для трехфазного двигателя приведена на рис. 5.60.
Рис.5.60
241
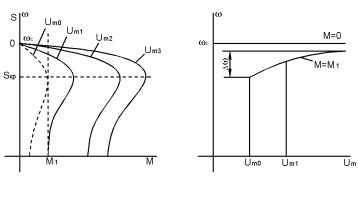
При изменении амплитуды питающих напряжений Um максимальный момент Mмакс изменяется пропорционально Um2, что следует из выражения (5.50). Тогда семейство механических характеристик для различных Um и Sкр<1 будет иметь вид, показанный на рис. 5.61, а. Sкр при этом не изменяется, так как основные параметры, от которых оно зависит (5.51), не изменяются. Все характеристики имеют одну общую точку ω=ωс, M=0. Она соответствует холостому ходу, когда ротор вращается со скоростью магнитного поля.
По семейству механических характеристик можно построить регулировочную характеристику для заданного момента нагрузки. На рис. 5.61, б изображены регулировочные характеристики для M=0 и M1>0. Из рисунка видно, что на холостом ходу скорость
а) |
б) |
Рис. 6.61
АСД не регулируется данным методом, а при наличии момента нагрузки регулировочная характеристика нелинейна, имеет зону нечувствительности и гистерезис. Регулирование скорости возможно в небольшом диапазоне ∆ω.
На рис.5.62 а приведены механические характеристики АСД при Sкр>1, а на рис. 5.62, б – регулировочные характеристики. Как и в предыдущем случае, на холостом ходу скорость не регулируется, имеется зона нечувствительности при M>0. Однако регулировочная характеристика имеет плавный вид и обеспечивает регулирование скорости в большом диапазоне, начиная от 0.
242
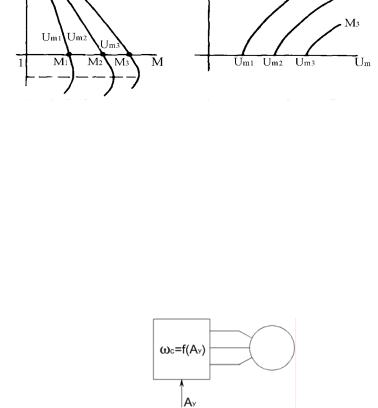
Рис. 5.62
Частотный метод управления. Управляющее устройство должно обеспечить изменение частоты ωс питающих напряжений при сохранении условий существования кругового поля (5.47). Схема метода представлена на рис. 5.63.
Рис. 5.63
При изменении частоты питающих напряжений ωС нужно иметь ввиду следующее:
1)ωхх = ωС, поэтому с ростом ωс механические характеристики будут подниматься;
2)Sкр в соответствии с выражением (5.51) будет уменьшаться с
ростом ωС (так как увеличиваются индуктивные сопротивления X1 и
X2′);
3) из анализа выражения (5.52) максимальный момент Mмакс обратно пропорционален ωС2 (при условии R1 < (X1+X2′)).
На рис. 5.64, а представлено семейство механических
243
характеристик, а на рис. 5.64, б – регулировочных характеристик при частотном методе управления.
|
|
а) |
|
|
|
|
|
б) |
|
|
|
|
Рис. 5.64 |
|
|
|
|
Характеристики |
приведены в |
относительных единицах: |
||||||
λω = |
ω |
; λM = |
M |
|
(или |
λM = |
M |
при Sкр>1). |
|
|
|
M П |
|||||
|
ωном |
M макс |
|
|
||||
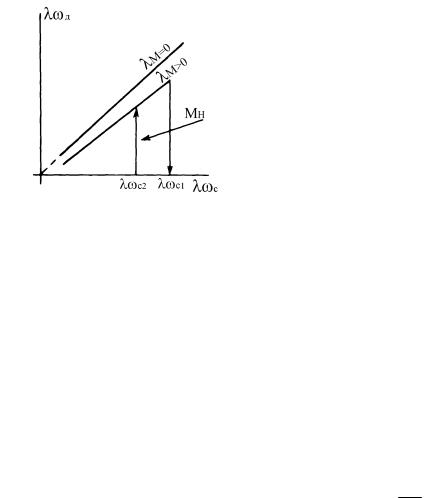
Регулировочные характеристики линейны, однако регулирование скорости, начиная от 0, затруднительно из-за сложности получения малых частот. Кроме того, с ростом ωс уменьшается Mмакс, что может привести к остановке двигателя при некоторой частоте ωС1. Если после этого уменьшать частоту ωС, то двигатель начнет вращаться при частоте ωС2, когда пусковой момент сравняется с моментом нагрузки.
Амплитудно-частотный метод управления. При этом методе управления одновременно изменяются амплитуда и частота
напряжений на фазах двигателя таким образом, что отношение U m
ωc
остается постоянным. Следовательно, остается постоянным и значение максимального момента Mмакс, которое пропорционально
244
U 2
отношению m . Схема метода приведена на рис. 5.65.
ωc2
Управляющее устройство обеспечивает такое управление.
Рис. 5.65
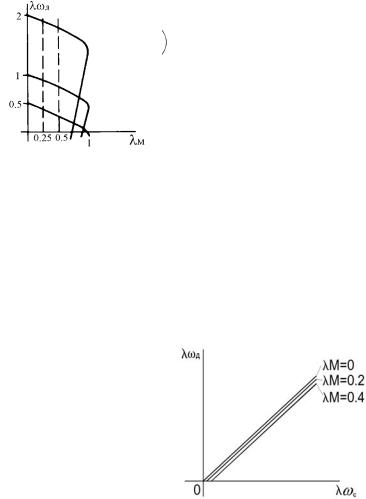
Механические характеристики приведены на рис. 5.66, а, а регулировочные – на рис. 5.66, б.
Следует отметить, что жесткость механических характеристик не изменяется, а регулировочные характеристики практически линейны, и коэффициент передачи двигателя постоянен.
Недостатком метода является сложность реализации устройства управления, которое является даже более сложным, чем при частотном методе управления.
а) |
б) |
|
Рис. 5.66 |
5.3.6. Методы управления АСД при эллиптическом поле
При нарушении одного из условий (5.47) существования кругового поля возбуждения, поле будет эллиптическим, т. е. конец
245
вектора магнитного потока Ф0 будет описывать эллипс за один период питающего напряжения (при p = 1). Пульсирующее поле и круговое поле являются лишь частными случаями эллиптического поля.
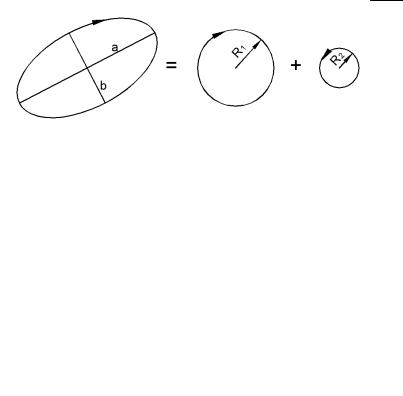
Методика получения механических характеристик при эллиптическом поле графическим методом состоит в том, что оно представляется в виде суммы двух круговых полей, вращающихся одно со скоростью ωС, а другое − со скоростью −ωС, т .е. в обратном направлении (рис. 5.67.). При известном значении полуосей
эллипса a и b радиус поля прямой последовательности R1 = a +2 b ,
а радиус поля обратной последовательности R2 = a −2 b .
Скольжение ротора относительно поля прямой последовательности Sпр будет отличаться от скольжения ротора относительно поля обратной последовательности Sобр, но при этом
очевидно, что Sпр+ Sобр=2. Зная радиусы R1 и R2 (фактически они отражают величину круговых магнитных полей прямой и обратной
последовательности), можно построить механические характеристики АСД для каждого поля в отдельности, а затем с помощью графического суммирования определить результирующую характеристику для эллиптического поля. При построении характеристик этим методом должна быть известна механическая характеристика для номинальных напряжений на фазах АСД.
Рис. 5.67
Амплитудный метод управления. Рассмотрим этот метод на примере управления скоростью двухфазного АСД. На обмотку возбуждения ОВ подается переменное напряжение неизменной
246
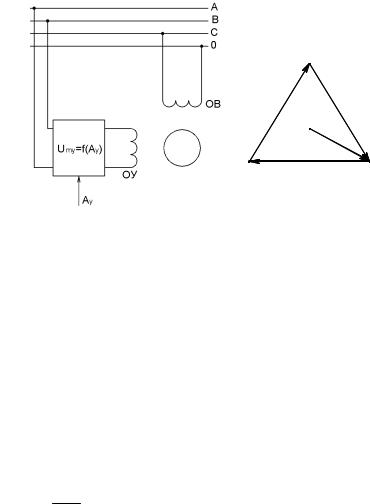
амплитуды UmВ. На обмотку управления ОУ подается напряжение той же частоты, сдвинутое по фазе на 90° относительно напряжения на ОВ. При наличии трехфазной цепи сдвиг фаз на 90° легко осуществить, если на одну обмотку подавать фазное напряжение, а на другую − линейное, как это показано на рис. 5.68, а.
а) б)
Рис. 5.68
Из векторной диаграммы напряжений (рис. 5.68, б) видно, что AB OC, т.е. сдвиг фаз на 90° осуществляется автоматически. При питании от однофазной сети необходимо использовать специальное фазосдвигающее устройство.
Амлитуда напряжения на обмотке управления UmУ изменяется в зависимости от величины управляющего сигнала Aу. При изменении амплитуды управляющего напряжения UmУ форма эллипса, который описывает вектор магнитного потока, будет изменяться от пульсирующего (UmУ = 0) до кругового (UmУ = UmВ) или эллиптического (UmУ ≠ UmВ), как показано на рис. 5.69.
Введем относительные величины: λу = |
U |
mУ |
; λω = |
ωД |
; |
|
|
ωС |
|||
|
U mB |
|
|||
λМ = M . В последнем выражении MП − пусковой момент для
M П
двигателей с Sкр>1. Если Sкр<1, то вместо MП принимается Mмакс.
247

Рис. 5.69
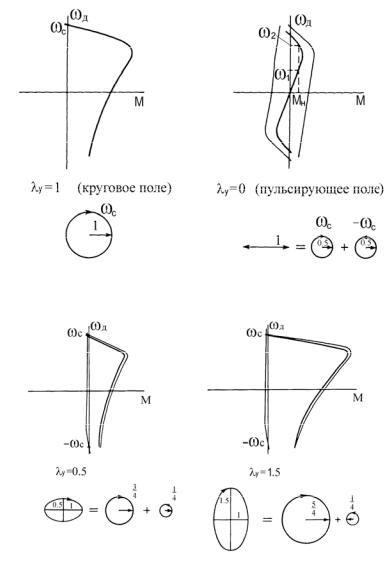
Построим механические и регулировочные характеристики для АСД с Sкр<1. Если механическая характеристика для номинальных
напряжений на обмотках UmУ = UmВ = Uном известна (например, рис. 5.70, а), то механическую характеристику для произвольных
напряжений (при круговом поле) можно получить из номинальной,
изменяя масштаб вдоль оси M пропорционально отношению |
U 2 |
. |
|
U ном2 |
|||
|
|
||
1. Пусть UmУ = 0 (λу = 0). Поле возбуждения |
будет |
||
пульсирующим. Примем амплитуду пульсирующего магнитного потока при номинальном напряжении на обмотке возбуждения UmВ за 1. В этом случае амплитуда полей прямой и обратной последовательностей будут равны R1 = R2 = 0,5. Механические характеристики для каждого из круговых полей и результирующая приведены на рис. 5.70, б.
Для получения результирующей характеристики суммируются моменты от каждого из двух круговых полей. Из характеристики видно, что при ω=0 пусковой момент равен нулю. Однако если двигателю придать некоторую угловую скорость ω1, то возникает вращающий момент и двигатель будет работать при моменте нагрузки Mн со скоростью ω2. Это означает, что при приходе сигнала UmУ=0 ротор двигателя будет вращаться, если он до этого вращался с ω>ω1, и даже при некотором моменте нагрузки. Это явление называется “самоходом”.
2. UmУ=0,5 UmВ (λу=0,5). Эллиптическое магнитное поле будет иметь полуоси 1 и 0,5 (в относительных единицах); а амплитуды
248
а) |
б) |
в) |
г) |
Рис. 5.70
249

круговых |
полей |
равны R1 = |
3 |
и |
R2 = |
1 . |
Механические |
|
|
|
4 |
|
|
4 |
|
характеристики для этого случая приведены на рис. 5.70, в. |
|||||||
3. UmУ |
= UmВ |
(λу=1). Круговое |
поле |
и |
механическая |
||
характеристика |
приведены |
на |
|
рис. 5.70, а |
(исходная |
||
характеристика).
4. UmУ = 1,5UmВ (λу=1,5). Амплитуды круговых полей равны R1
= 54 и R2 = 14 . Механические характеристики приведены на рис.
5.70, г.
Таким образом, мы получим семейство механических характеристик для значений управляющего сигнала λу = 0; 0,5; 1; 1,5 (рис. 5.71, а). Регулировочные характеристики приведены на рис. 5.71, б. Они показывают, что при M = 0 (холостой ход) ωхх = ωс только при λу = 1, т. е. при круговом поле. При других значениях λу (при эллиптическом поле) круговое поле обратной последовательности создает тормозящий момент, что и приводит к ωхх < ωС. Кроме того, при λу = 0 двигатель не останавливается (явление “самохода”). Явление самохода будет наблюдаться и при моменте нагрузки Mн < M0. При Mн > M0 двигатель будет останавливаться при λу = 0, но регулировочная характеристика имеет гистерезис, а регулирование скорости возможно в сравнительно небольших пределах.
Рис. 5.71
250