

Михеев Исполнителные устройства автоматических 2008
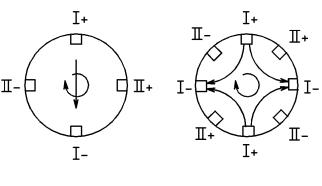
.pdfугловая скорость вращения магнитного поля ωФ равна частоте питающей сети ωС;
ωФ не зависит от амплитуды напряжения питающей сети Um; направление вращения поля определяется последовательностью
фаз. Для изменения направления вращения нужно поменять местами фазы I и II.
Рис. 5.53
Рис. 5.54
Количество фаз возбуждения n может быть и более двух.
Условие получения кругового магнитного |
поля для n > 2 |
|||||
записывается в виде: |
|
|
|
|
|
|
1) |
Фm1 = Фm2 = ... = Фmn; |
|
||||
2) |
ϕ n-1,n = |
|
2π |
; |
|
|
|
|
|
|
|||
|
|
|
n |
|
||
3) |
βn-1,n = |
2π |
(5.47) |
|||
|
|
, |
||||
|
n |
|||||
|
|
231 |
|
|||
где Фmn − амплитуда магнитного потока от n-й фазы; ϕ n-1,n − сдвиг фаз напряжений, питающих (n-1)-ую и n-ую фазу (обмотку возбуждения); β n-1, n − пространственный сдвиг между (n-1)-й и n-й фазами (обмотками возбуждения).
Данное условие не выполняется только для двухфазного двигателя (n = 2). В этом случае в формулы (5.47) нужно подставлять n = 4.
а) |
б) |
|
Рис. 5.55 |
В рассмотренном выше двухфазном двигателе мы предполагали, что каждая фаза имеет одну пару полюсов (p = 1). Расположение полюсов для этого случая показано на рис. 5.55, а. Однако количество пар полюсов p может быть большим. Так при p = 2 для двухфазного АСД расположение полюсов и направление магнитных силовых линий будет таким, как показано на рис. 5.55, б. При этом магнитное поле за один период питающей сети повернется на 180°, т. е. фазовая скорость вращения
магнитного поля ωФ будет в два раза меньше, чем ωс. В общем случае ωФ = ωpс .
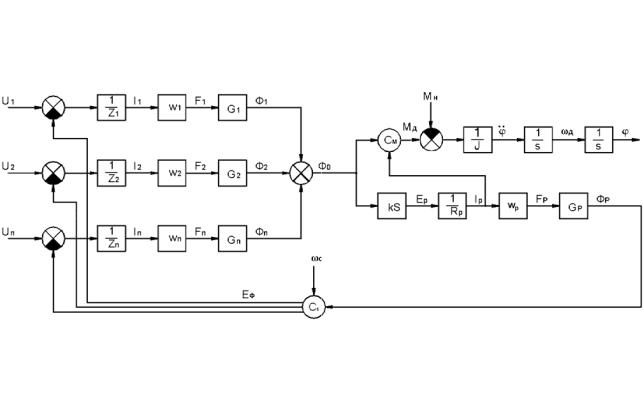
5.3.2. Структурная схема АСД
Структурная схема АСД представлена на рис. 5.56. На рисунке приняты следующие обозначения:
n − число фаз возбуждения;
232
233
Рис. 5.56
Ui − напряжение, подаваемое на i-ю фазу; Ui = Um sin(ωСt−ϕi); ϕi − сдвиг фазы питающего напряжения для i-й фазы (обмотки); Zi − полное сопротивление i-й фазы;
Ii − ток в i-й фазе;
wi − число витков в обмотке i-й фазы; Fi − намагничивающая сила i-й фазы;
Gi − магнитная проводимость для i-й фазы; Фi − магнитный поток для i-й фазы;
Ф0− суммарный магнитный поток от всех фаз − вращающееся магнитное поле с частотой ωФ;
S − скольжение; S = |
ωФ −ωД |
или S = |
ωС −ωД |
при p = 1; |
ωФ |
|
|||
|
|
ωС |
||
K − конструктивный коэффициент; EР − ЭДС ротора;
Rр − активное сопротивление ротора; Iр − ток ротора;
Fр − намагничивающая сила ротора;
Фр − магнитный поток ротора из-за тока Iр; wр − число витков ротора (обычно 1);
Gр − магнитная проводимость для потока Фр; ωд − угловая скорость вращения ротора;
EФ − ЭДС, возникающая в обмотках статора (фазах) от магнитного поля ротора.
Остальные обозначения аналогичны обозначениям на структурной схеме ИДПТ (см. рис. 5.3).
На фазы АСД подаются переменные напряжения, сдвинутые на угол ϕi. При симметричности фаз и выполнении условий (5.47) переменные магнитные потоки Фi в сумме дают вращающееся круговое поле с магнитным потоком Ф0, который наводит в роторе ЭДС EР. По проводникам ротора протекает ток Iр, который взаимодействует с магнитным полем, в результате чего создается вращающий момент MД. Для объяснения возникновения момента MД обратимся к рис. 5.57. На рис. 5.57, а изображен разрез ротора типа «беличьей клетки» и магнитный поток Ф0. Вектор Ф0 вращается с угловой скоростью ωС (считаем p = 1) по часовой
234
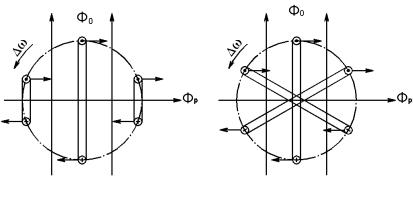
стрелке. Ротор вращается со скоростью ωД < ωС в том же направлении. Относительно вектора Ф0 он вращается со скоростью ∆ω = ωС − ωД в обратном направлении (против часовой стрелки).
Ротор можно представить в виде отдельных замкнутых рамок (рис.5.57, а). При повороте ротора относительно магнитного поля изменяется магнитный поток, пронизывающий рамки, в них возникает ЭДС и ток, условно показанный острием и оперением стрелы. Вращающие моменты, которые создаются каждой рамкой, в сумме дают вращающий момент MД, направленный в сторону вращения магнитного поля. На рис. 5.57, б тот же ротор представлен в виде отдельных рамок, расположенных под разными углами. Однако ход рассуждений от этого не изменяется, и мы приходим к тому же результату.
а) |
б) |
Рис. 5.57
Из рис. 5.57 видно, что из-за токов в роторе возникает магнитный поток ротора Фр, который вращается в направлении вращения поля с той же угловой скоростью ωС. В обмотках статора (фазах) наводится ЭДС EФ, пропорциональная потоку Фр, частоте ωС и конструктивному коэффициенту cЕ, учитывающему такие параметры, как число витков в обмотках статора, геометрические размеры и т.п. Применительно к структурной схеме АСД сE ≠ сM, так как они относятся к разным частям конструкции АСД в отличие
235

от ИДПТ, где подобные коэффициенты учитывали конструктивные особенности одной детали − якоря ИДПТ.
ЭДС EФ, возникающая в обмотках возбуждения (фазах), сдвинута по фазе относительно напряжения, подаваемого на эту обмотку, поэтому знак суммирования следует понимать условно, с учетом этого сдвига фаз. При этом следует иметь ввиду, что при ωС=ωД EФ=0, так как ротор неподвижен относительно вращающегося поля и ЭДС в роторе не возникает.
5.3.3. Схема замещения асинхронного двигателя
Схема замещения АСД имеет много общего со схемой замещения трансформатора. Если обмотки возбуждения (фазы) АСД считать первичной обмоткой трансформатора, то ротор можно считать вторичной обмоткой трансформатора, связанной с первичной через магнитный поток.
Прежде чем перейти к схеме замещения АСД в целом, рассмотрим схему замещения ротора [6]. В заторможенном
состоянии (ротор неподвижен, S = 1) АСД эквивалентен трансформатору, у которого вторичная обмотка (ротор) закорочена, и вся энергия выделяется на активном сопротивлении ротора R2 (рис. 5.58, а). ЭДС E, наводимая в роторе, и индуктивное сопротивление рассеяния ротора X2о пропорциональны скорости вращения вектора магнитного поля ωс (считаем р=1).
Если ротор вращается со скоростью ωД, магнитное поле
вращается относительно ротора со скоростью ωС-ωД, и, соответственно, значение ЭДС и индуктивное сопротивление рассеяния будут равны:
E |
|
= E |
|
ωC −ωД |
= Е |
|
S ; X |
|
= X |
|
S . |
||
P |
P0 ω |
С |
Р0 |
2 |
20 |
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Этим выражениям соответствует схема на рис. 5.58, б. Ток ротора I2 , будет равен:
I2 = |
EP0 S |
. |
|
R22 + X 202 S 2 |
|||
|
|
236
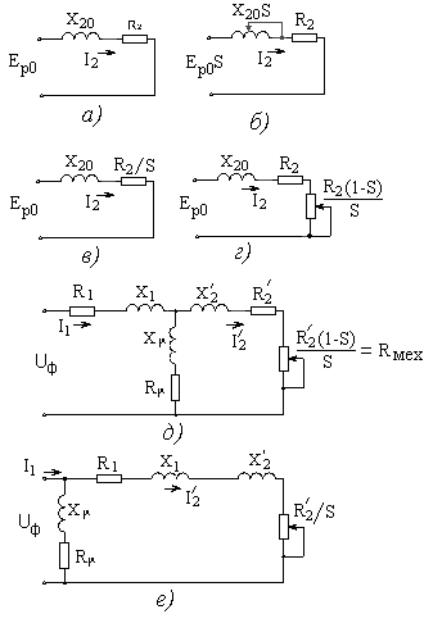
Рис. 5.58
237

Учитывая, что скольжение S присутствует и в числителе, и в знаменателе, полученное выражение можно переписать так:
I2 |
= |
EP |
0 |
. |
R22 / S 2 |
|
|||
|
|
|
+ X 202 |
Этому выражению будет соответствовать схема, приведенная на рис. 5.58, в.
Сопротивление R2/S можно представить в виде суммы:
RS2 = R2 + R2 1 −S S .
Тогда схему замещения можно представить в виде, приведенном на рис. 5.58, г.
Сравнивая схему замещения для неподвижного ротора (рис. 5.58, а) и схему замещения для вращающегося ротора (рис. 5.58, г), мы видим, что они отличаются только наличием фиктивного
сопротивления R |
2 |
1− S |
в схеме для вращающегося ротора, |
|
|
S |
|||
|
|
|
||
которое отражает потери на механическую мощность Рмех. Таким образом:
Pмех = I22 R2 1−SS .
С другой стороны, механическую мощность на валу ротора можно выразить через момент M и скорость вращения ωд:
Pмех = MωД = I22 R2 1 −S S .
Подставив S = |
ωC −ωД |
, получим: |
|
||
|
ω |
|
|
C |
|
M (ω |
C |
−ω |
Д |
) = I 2 R |
или Mω |
С |
S = I 2 R |
. |
|
|
2 2 |
|
2 2 |
|
Это выражение следует понимать как уменьшение механической мощности на валу двигателя из-за потерь мощности на активном сопротивлении ротора R2′. В теории электрических машин это выражение известно как выражение потерь [5].
Теперь рассмотрим схему замещения АСД в целом. При
238
симметричности обмоток двигателя достаточно рассмотреть схему замещения для одной фазы (рис. 5.58, д). На схеме приняты следующие обозначения:
Uф – напряжение на фазе двигателя; |
|
|
|
|
R1 – активное сопротивление обмотки статора (фазы); |
|
|||
X1 – индуктивное сопротивление, |
соответствующее потоку |
|||
рассеяния обмотки статора; |
|
|
|
|
X µ – индуктивное сопротивление, соответствующее магнитному |
||||
потоку взаимоиндукции статора и ротора; |
|
|
||
Rµ – активное |
сопротивление, соответствующее |
потерям |
в |
|
магнитной цепи (перемагничивание, вихревые токи); |
|
|
||
X2′– приведенное индуктивное сопротивление, соответствующее |
||||
потокам рассеяния ротора; |
|
|
|
|
R2′– приведенное активное сопротивление ротора; |
|
|
||
Rмех – фиктивное |
сопротивление, |
отражающее |
потери |
на |
механическую мощность;
I1 – ток в обмотке возбуждения(фазе); I2′ – приведенное значение тока в роторе.
5.3.4. Механические характеристики асинхронного двигател.
Для вывода выражения вращающего момента произведем упрощение в схеме замещения: потери в магнитопроводе представим так, как это показано на рис. 5.58, е.
Момент асинхронного двигателя может быть определен из выражения потерь:
M(ωс−ωд)=n(I2′)2R2′,
где n – число фаз двигателя. Из приведенного выражения получим вращающий момент двигателя:
M = |
n(I ' |
)2 |
R' |
|
|
2 |
|
2 |
. |
(5.48) |
|
ωC S |
|
||||
|
|
|
|
||
В соответствии с упрощенной схемой замещения (рис. 5.58, е) можно записать:
239
I2' = |
|
UФ |
|
|
. |
(5.49) |
|
R' |
|
|
|
|
|
(R + |
2 |
)2 +(X |
1 |
+ X ' |
)2 |
|
|
|
|||||
1 |
S |
2 |
|
|
||
|
|
|
|
|
||
Подставляя (5.49) в (5.48), получим:
M = |
|
|
|
|
nUФ2 R2' |
|
|
|
. |
(5.50) |
|
|
|
|
|
R2' |
|
|
|
|
|||
|
ω |
C |
[(R |
+ |
)2 + ( X |
1 |
+ X ' |
)2 ]S |
|
||
|
|
||||||||||
|
|
1 |
|
S |
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Зависимость (5.50) имеет два максимума (рис. 5.58, а): один в генераторном режиме (ωД > ωС), другой – в двигательном (ωД < ωС).
Полагая |
dM |
= 0 , определяем значение критического |
|
dS |
|||
|
|
скольжения Sкр, при котором двигатель развивает максимальный момент:
Skp = ± |
R2' |
|
. |
(5.51) |
|
+(X |
|
+ X ' |
|||
R2 |
1 |
)2 |
|
||
1 |
|
2 |
|
|
|
Подставляя Sкр в (5.50), находим выражение для максимального момента:
M макс = |
|
|
nUФ2 |
|
|
|
. |
(5.52) |
|
|
[R ± R2 |
+( X |
|
+ X ' |
)2 |
||||
2ω |
C |
1 |
] |
|
|||||
|
1 |
1 |
|
2 |
|
|
|
||
Знак «+» в равенствах (5.51) и (5.52) относится к двигательному режиму, знак «−» – к генераторному.
Механическая характеристика АСД общего применения (не исполнительного двигателя) приведена на рис. 5 59, а. Устойчивая работа такого двигателя обеспечивается в диапазоне скольжений от 0 до Sкр. Неустойчивый участок характеристики показан пунктиром. Такой вид характеристики соответствует малой величине критического скольжения Sкр < 1. Величина пускового момента Mп у таких двигателей существенно меньше максимального Mмакс.
Для получения устойчивой работы двигателя в диапазоне угловых скоростей от 0 до ωС используются АСД с величиной Sкр>1. Механическая характеристика такого двигателя приведена на рис. 5.59, б. При этом рабочий участок характеристики (от 0 до ωс)
240