

Михеев Исполнителные устройства автоматических 2008
.pdfРис. 3.10
3.2.1. Принцип действия
При рассмотрении работы ГНВ на нагрузку было показано, что кроме потока возбуждения (управления), направленного по продольной оси машины, в ней возникает поток поперечной реакции якоря Фaq, направленный по поперечной оси машины. При токах якоря, близких к номинальному, Фaq обычно близок по величине к потоку возбуждения, а иногда и превышает его. Поток Фaq в пространстве практически неподвижен, и в проводниках обмотки якоря, вращающегося в этом потоке, будет наводиться ЭДС значительной величины. Следовательно, поток поперечной реакции якоря можно рассматривать как второй поток возбуждения, существующий в машине.
ЭДС, наводимая в проводниках якоря потоком Фaq, не может быть снята щетками, расположенными по поперечной оси q-q. Но если на коллекторе установить еще одну дополнительную пару щеток по продольной оси d-d (рис. 3.11), то эти щетки будут снимать суммарную ЭДС Ed со всех проводников обмотки якоря, возникающую при его вращении в потоке поперечной реакции якоря Фaq, т.е. для щеток d-d поток Фaq будет являться потоком возбуждения.
Этот принцип и используется в ЭМУ поперечного поля. Для создания большого потока Фaq при малом потоке управления щетки, расположенные по оси q-q , закорачивают (рис. 3.12). Тогда даже при небольшой ЭДС, наводимой в обмотке якоря потоком
101
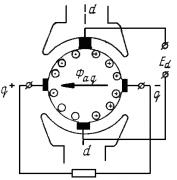
Рис. 3.11
управления и снимаемой со щеток q-q , ток в обмотке якоря из-за малой величины ее сопротивления, а следовательно, и поток Фaq могут быть достаточно большими. Для еще большего увеличения Фаq иногда на статоре машины располагают дополнительные так называемые поперечные обмотки wп,, включаемые последовательно с обмоткой якоря (показаны на рис. 3.12 пунктиром). Для более устойчивой работы ЭМУ поперечные щетки смещают относительно геометрический нейтрали так, чтобы иметь небольшую продольную составляющую Fdq поперечной реакции якоря, направленную встречно НС управления (рис. 3.12).
Таким образом, первый каскад усиления такой машины – “обмотка управления – поперечные щетки машины”, а второй – “обмотка якоря, закороченная по цепи поперечных щеток, – продольные щетки машины”.
После замыкания цепи продольных щеток на сопротивление нагрузки по обмотке якоря потечет ток Id=Iн, который создаст поток реакции якоря, направленный вдоль продольной оси d-d машины, т.е. продольный поток реакции якоря Фad.
Поток Фad направлен встречно потоку управления. Если Фad сравним с Фy, то по продольной оси машина размагнитится, выходное напряжение снизится до весьма малой величины и значительно уменьшатся коэффициенты усиления по напряжению и мощности. Чтобы скомпенсировать размагничивающее действие
102
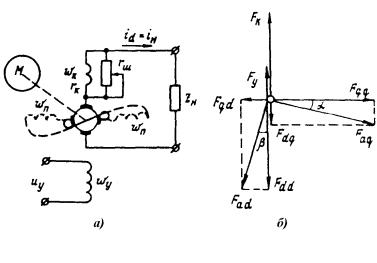
продольной реакции якоря, на статоре машины размещается дополнительная компенсационная обмотка wк, ось которой совпадает с продольной осью d – d машины. Компенсационную обмотку wк включают последовательно с продольной цепью якоря и нагрузки (рис. 3.12, а) так, чтобы по ней протекал ток нагрузки. В этом случае НС Fк при любом токе нагрузки пропорциональна НС продольной реакции якоря. На рис. 3.12, б приведена пространственная диаграмма НС ЭМУ в этом режиме работы.
Рис. 3.12
По ряду причин НС продольной реакции якоря Fad направлена под небольшим углом β к продольной оси машины. Поэтому по поперечной оси, кроме НС Fqq, действует поперечная составляющая продольной реакции якоря Fqd, пропорциональная току продольной цепи машины, т.е. току нагрузки.
Чтобы иметь возможность изменить НС компенсационной обмотки wк, последнюю шунтируют регулируемым сопротивлением rш. Поскольку назначение обмотки wк – компенсация потока продольной реакции якоря, то кроме
103
выполнения условия равенства НС, создаваемых wк и обмоткой якоря, необходимо выполнить условие одинакового пространственного распределения этих НС, так как НС реакции якоря создается обмоткой якоря, расположенной в пазах цилиндрического сердечника. Последнее требование обусловливает специфичность конструкции статора ЭМУ поперечного поля.
3.2.2.Статические характеристики ЭМУ
Врежиме холостого хода при разомкнутой цепи нагрузки ток по продольной цепи машины в статическом режиме работы равен нулю, поэтому поток Фd создается только токами, протекающими по обмоткам управления, и продольной составляющей поперечной реакции якоря Fdq, т.е. НС по продольной оси:
|
|
F = F − F |
= w |
I |
|
− w |
ωя I |
|
, |
(3.6) |
||
|
|
d |
y dq |
у |
|
у |
q |
2 |
q |
|
|
|
где – |
∆q = |
Fdq |
коэффициент, |
определяющий |
продольную |
|||||||
F |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
aq |
|
|
|
|
|
|
|
|
|
|
составляющую якоря, Iq – ток, протекающий по обмотке якоря через короткозамкнутые щетки (рис. 3.12, б).
ЭДС, наводимая в цепи поперечных щеток, пропорциональна Fd
и равна Eq=КqFd , а ток Iq = |
Eq |
, где rq |
– активное |
|
rq +rqa |
||||
|
|
|
сопротивление в цепи поперечных щеток, а rqa – фиктивная составляющая из-за Fdq. ЭДС, наводимая в якоре при вращении в поле реакции якоря Fqq, равна Ed = CewGq Fqq ≈ CewGq Fad , так как угол α мал (рис. 3.12, б), и Fqq ≈ Faq .
Таким образом, если проследить всю цепочку преобразования энергии, то можно записать:
104
|
C 2ω2G |
G |
w |
w |
у |
|
|
Ed = |
e d |
q |
я |
|
U y = KuU y . |
(3.7) |
|
2Ry (rq + rqa ) |
|
||||||
|
|
|
|
||||
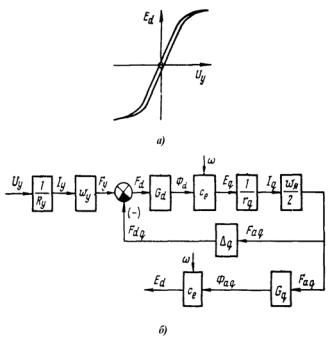
Эту цепочку удобно проследить по структурной схеме ЭМУ для режима холостого хода (рис. 3.13, б). На рис. 3.13, а приведена регулировочная характеристика ГНВ в режиме холостого хода, учитывающая насыщение магнитной цепи и гистерезис.
Из выражения для коэффициента усиления по напряжению Кu:
|
|
|
|
|
r |
|
|
r |
|
C 2ω2G |
G |
w |
w |
у |
|
||
K |
|
= K |
|
|
q |
= |
|
q |
= |
e |
d |
|
q |
я |
|
, |
|
u |
uo r |
+ r |
r |
+ r |
2R |
(r |
|
+ r |
) |
|
|||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
q |
qa |
|
q |
qa |
|
y |
q |
qa |
|
|
|
||
можно оценить влияние параметров машины на его величину и стабильность.
Рис. 3.13
105

Из этого выражения следует, что Кu пропорционален магнитным проводимостям машины и квадрату скорости вращения. Это учитывается при выборе материалов для изготовления магнитопровода машины и выборе параметров приводного двигателя.
Диаграмма НС машины при работе на нагрузку представлена на рис. 3.12, б. НС по продольной оси равна:
Fd = Fy − Fdq − Fdd + Fк .
Поскольку при малом угле β F |
≈ F |
|
= I |
|
wя |
|
, то |
|||||||||||
|
d 2 |
|||||||||||||||||
|
|
|
|
|
|
|
dd |
|
ad |
|
|
|
|
|||||
F |
= F |
|
− I |
|
∆ |
|
wя |
− I |
|
wя |
+ I |
|
|
w |
|
. |
||
|
|
|
|
|
2 |
|
|
|
||||||||||
d |
|
y |
|
q |
|
q |
2 |
|
|
d |
|
|
н |
|
к |
|
||
Шунтированием компенсационной обмотки wк регулировочным сопротивлением rш (см. рис. 3.12, а) пока пренебрегаем.:
Iк = Id |
|
rш |
, |
r |
+ r |
||
|
ш |
к |
|
где rк – активное сопротивление wк . Учитывая, что Iк=Id=Iн, можно записать:
Fd = Fy − Iq ∆q w2я + Id wк ,
wя |
|
|
|
|
|
|
|
|
− Id |
wя |
|
2wк |
|
|
|||
Fd = Fy − Iq∆q 2 |
2 |
1 |
− |
w |
|
, |
(3.8) |
|
|
|
|
|
|
я |
|
|
|
Величина 2wк в последнем выражении характеризует степень wя
компенсации продольной реакции якоря и называется коэффициентом компенсации Кк.
Если Кк = 1, то Fd не зависит от тока продольной цепи, т.е. продольная составляющая Fdd полностью скомпенсирована Fк. В этом случае считают, что ЭМУ имеет полную или нормальную
106

компенсацию. Если Кк < 1, то Fк < Fdd, и ток нагрузки несколько размагничивает машину, уменьшая выходное напряжение. Такой режим работы называют режимом недокомпенсации, он соответствует наличию в машине внутренней отрицательной ОС по току нагрузки. При перекоменсации (Кк >1) Fк >Fdd, что соответствует внутренней положительной ОС по току нагрузки.
Таким образом, для Fd окончательным будет выражение:
Fd = wy I y − Iq ∆q w2я − Id w2я (1 − Kк ).
На основании пространственной диаграммы (рис. 3.12, б) НС по поперечной оси:
Fq = Fqq – Fqd ≈ Faq – Faq – Fqd.
Поперечная составляющая продольной реакции якоря пропорциональна току цепи продольных щеток, поэтому можно записать:
|
F |
= ∆ |
|
wя |
|
I |
|
, |
|
|
|
|||||
|
|
|
|
|
|
|||||||||||
|
|
qd |
|
|
|
d 2 |
|
|
|
|
d |
|
|
|
|
|
где ∆d – коэффициент пропорциональности. |
|
|
||||||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F = |
wя |
I |
|
− ∆ |
|
|
|
wя |
I |
|
. |
|||||
|
|
|
|
|
|
|||||||||||
q |
2 |
|
|
q |
|
|
d |
|
|
2 |
|
d |
|
|||
Из сравнения выражений (3.6) и (3.8) видно, что они отличаются наличием третьего слагаемого в выражении (3.8), которое отражает влияние продольной реакции якоря на величину Fd и степень ее компенсации. Очевидно, что при полной компенсации (Кк = 1) эти выражения совпадают. Недокомпенсация или перекомпенсация могут быть учтены введением фиктивной составляющей в выходное сопротивление ЭМУ, т.е. Rвых = rd + rф , где rd – активное сопротивление в цепи продольных щеток, rф – фиктивное сопротивление, учитывающее, что Кк ≠1. При Кк > 1, rф < 0, и
107
наоборот. При некотором значении Кк > 1 выходное сопротивление Rвых = 0. Это значение Кк называется критическим Ккр.
Напряжение на нагрузке определяется выражением:
U н = Ed − IнRвых = KuU y − IнRвых .
Из него можно получить статические характеристики ЭМУ, внешнюю и регулировочную.
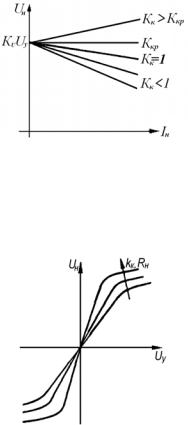
На рис. 3.14, а приведены внешние характеристики ЭМУ при различных значениях Кк.
Рис. 3.14
На рис. 3.15 приведены регулировочные характеристики при
Rн = const и Кк = const.
Рис. 3.15
108
Регулировочные характеристики при Iн= const для трех значений Кк приведены на рис. 3.16.
Рис. 3.16
Характеристика, проходящая через начало координат, соответствует Кк = Ккр при любом значении Iн или Iн = 0 при любом значении Кк.
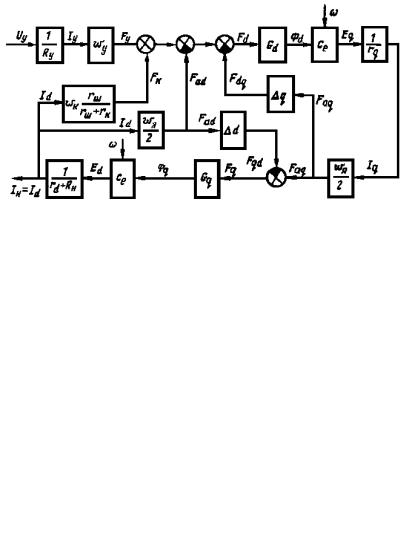
На рис. 3.17 приведена структурная схема нагруженного ЭМУ в статическом режиме работы, поясняющая преобразования сигналов, и цепи внутренних обратных связей.
Рис. 3.17
109
Коэффициент передачи (усиления) напряжения ЭМУ, работающего под нагрузкой, определяется следующим выражением:
(Ku )н = Ku |
|
|
Rн |
|
= |
Ce2ω2Gd Gq wяwу |
|
Rн |
|
. |
|||
R |
н |
+ R |
вых |
2R |
(r + r ) |
|
R |
н |
+ R |
|
|||
|
|
|
|
y |
q qa |
|
вых |
||||||
Современные ЭМУ поперечного поля в номинальном режиме работы имеют КN порядка 103 – 104. Благодаря большому коэффициенту усиления напряженность, создаваемая обмотками управления, невелика и соизмерима с коэрцитивной силой ферромагнитных материалов, используемых в магнитной цепи ЭМУ. Поэтому регулировочные характеристики реальных ЭМУ отличаются от идеализированных (рис. 3.15 и 3.16) нелинейностью на начальном участке и наличием гистерезиса. Также нелинейны и внешние характеристики вследствие изменения скорости приводного двигателя.
110