

Михеев Исполнителные устройства автоматических 2008
.pdfвнешняя (механическая) характеристика − ω = f (MН ) при АУ = =const.
В зависимости от того, какая величина выбрана в качестве управляющей, различают четыре метода управления скоростью ИДПТ: AУ = UЯ − якорный метод управления; AУ = RЯ − реостатноякорный метод управления; AУ = UВ − полюсный метод управления; AУ = RВ − реостатно-полюсный метод управления.
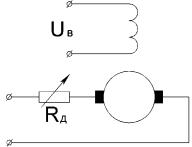
Якорный метод управления. Схема якорного метода управления приведена на рис. 5.4. На обмотку возбуждения подается постоянное напряжение UВ. На якорь подается изменяющееся напряжение UЯ с выхода усилителя мощности УМ, который должен удовлетворять ряду очевидных требований: выходная мощность УМ должна быть больше номинальной мощности двигателя; выходное сопротивление УМ должно быть много меньше сопротивления якоря RЯ (иначе не получим чисто якорного метода управления); инерционность УМ должна быть достаточно малой, чтобы не ухудшать динамические характеристики двигателя; и, наконец, при больших мощностях двигателя желательно, чтобы УМ был обратимым преобразователем. Механическая энергия двигателя при этом будет возвращаться в сеть при тормозных режимах.
Рис. 5.4
Выведем основное уравнение ИДТП, связывающее входную величину UЯ, скорость вращения ω (выходную величину) и момент
181

нагрузки MН (нагрузочный параметр). Учтем, что в статическом
режиме MД = MН = M.
Ток якоря по закону Ома определяется выражением:
I Я = |
U Я − Е |
. |
(5.1) |
|
|||
|
RЯ |
|
|
ЭДС якоря E, направленная навстречу UЯ, определяется |
|||
выражением |
|
||
E = cM ФВ ω. |
(5.2) |
||
Момент двигателя в статическом режиме определяется выражением M = сЕ ФВ IЯ , откуда ток якоря в статическом режиме равен:
I Я = |
M |
. |
(5.3) |
|
|||
|
cМФВ |
|
|
Подставляя (5.2) и (5.3) в выражение (5.1), получим:
M |
= |
U Я − cEФВω |
. |
(5.4) |
cM ФB |
|
|||
|
RЯ |
|
||
Можно показать, что коэффициенты cЕ и cМ численно равны, т. е. cЕ =cМ =c. Учитывая это, разрешим уравнение (5.4) относительноω:
ω = |
1 |
U |
Я |
− |
RЯ |
М . |
|
cФB |
c2ФВ2 |
||||||
|
|
|
|
Введем следующие обозначения:
k Д = сФ1 В ,
(5.5)
(5.6)
где kД − коэффициент передачи двигателя ,
γ − жесткость механической характеристики.
γ = − |
c2Ф2 |
|
|
В |
. |
(5.7) |
|
|
|||
|
RЯ |
|
|
Тогда выражение (5.5) можно переписать в следующем виде:
182
|
ω = k ДU Я − RЯ k Д2 M |
(5.8) |
|||||||
или |
ω = k |
Д |
U |
Я |
+ |
1 |
M . |
(5.9) |
|
γ |
|||||||||
|
|
|
|
|
|
||||
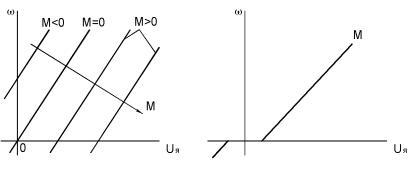
Уравнения (5.5), (5.8) и (5.9) определяют все статические характеристики двигателя. На рис.5.5 приведено семейство регулировочных характеристик ИДПТ ω = f (UЯ ) при M = const для различных значений момента нагрузки на валу двигателя. При M = =0 характеристика проходит через начало координат, однако это идеализированный случай, так как всегда существует момент нагрузки из-за трения в подшипниках. Его можно получить, приложив к валу отрицательный момент, равный по величине моменту трения. Отрицательный момент нагрузки действует в направлении вращения вала двигателя и может создаваться только активной нагрузкой: висящий груз, другой двигатель и т. п. При изменении полярности управляющего напряжения он изменяет
а) |
б) |
Рис. 5.5
знак. В отличие от активной нагрузки пассивная нагрузка при изменении направления вращения знака момента не изменяет. Момент может быть только тормозящим (рис. 5.5, б).
Коэффициент передачи двигателя kД определяется как тангенс угла наклона характеристики к оси абсцисс. При изменении момента характеристика смещается параллельно самой себе.
183
Значение UЯ, при котором ω = 0, называется напряжением трогания UТР. Для реального двигателя из-за трения в подшипниках и щетках всегда UТР > 0. Напряжение UТР легко получить из уравнения (5.8),
положив ω = 0: UТР = RЯ kД M.
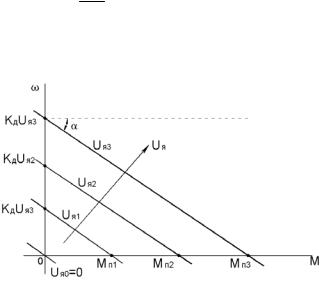
На рис. 5.6 приведено семейство механических характеристик ω = f (M) при UЯ = const для различных значений UЯ. Жесткость механической характеристики γ определяет ее наклон и численно равна котангенсу угла наклона α характеристики относительно горизонтали: γ = dMdω .
Для горизонтальной механической характеристики γ = ∞. Она может быть только у идеального двигателя при RЯ = 0 (см. выражение (5.7)).
Рис. 5.6
При отсутствии нагрузки на валу (M = 0) двигатель находится в режиме холостого хода. Значение скорости холостого хода ωХХ получим из выражения (5.8), положив M = 0: ωХХ = kД UЯ.
При увеличении момента нагрузки скорость двигателя падает и при некотором значении MП становится равной 0. Это режим короткого замыкания. При этом момент MП называется пусковым.
184
Выражение для пускового момента MП легко найти из уравнения
(5.8), положив ω = 0:
M П = U Я . k Д RЯ
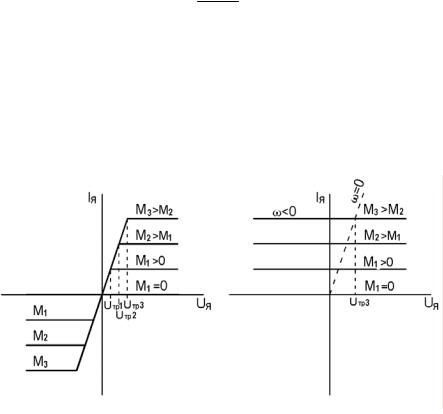
На рис. 5.7 изображены токовые характеристики ИДПТ: IЯ = f(UЯ) для различных значений момента нагрузки. Рис. 5.7, а соответствует пассивной нагрузке на валу двигателя, а рис. 5.7, б − активной нагрузке. На рис. 5.7, а наклонный участок соответствует значениям UЯ < UТР для данного момента. Скорость двигателя при этом равна нулю, и ток якоря определяется законом Ома:
I Я |
= |
U Я |
. |
(5.10) |
|
||||
|
|
RЯ |
|
|
а) |
б) |
Рис. 5.7
При достижении UЯ напряжения трогания UТР якорь начинает вращаться и в нем индуцируется ЭДС, пропорциональная скорости вращения. В статическом режиме при установившейся скорости ω ток якоря определяется выражением (5.3), т. е. остается постоянным, пропорциональным значению M.
185
При отрицательных значениях UЯ момент двигателя и момент пассивной нагрузки (трение) меняют знак, и характеристика в III квадранте будет симметрична рассмотренной выше.
Для активной нагрузки (висящий груз) токовые характеристики выглядят иначе (рис. 5.7, б). При значениях UЯ < UТР вращающий момент двигателя MД меньше момента нагрузки MН, и якорь будет вращаться за счет отрицательной разности MД − MН в отрицательном направлении (т.е. направлении, противоположном вращающему моменту). Ток якоря будет определяться выражением (5.3). Скорость ω = 0 может быть только при UЯ = UТР. Пунктирная линия на рис. 5.7, б разделяет семейство характеристик на две части. В левой части ω < 0, в правой − ω > 0. Точки на пунктирной линии соответствуют ω = 0.
Реостатно-якорный метод управления. В этом методе изменение скорости двигателя достигается за счет изменения дополнительного сопротивления, включенного последовательно с якорем (рис. 5.8). Следует отметить, что увеличение сопротивления
Рис. 5.8
в цепи якоря уменьшает жесткость механической характеристики (см. (5.7)), что, как правило, является нежелательным. Обычно этот метод применяется для маломощных двигателей, используемых в бытовой технике, в силу его простоты и дешевизны.
Механические характеристики для различных значений дополнительного сопротивления RД приведены на рис. 5.9. Они
186
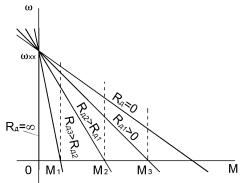
Рис. 5.9
определяются выражением (5.8), если вместо RЯ подставить RД +RЯ. Характеристика, соответствующая RД=0, называется естественной. Остальные характеристики называются реостатными. В режиме холостого хода (M = 0) скорость вращения ω не зависит от величины сопротивления в якорной цепи, т.е. при отсутствии момента нагрузки на валу двигателя регулирование скорости с помощью этого метода невозможно. Регулировочные характеристики определяются выражением (5.8), если вместо RЯ подставить RД +RЯ. Они приведены на рис. 5.10. Они могут быть построены и по семейству механических характеристик для фиксированных моментов, как показано на рис. 5.9.
Из рис. 5.10 видно, что все характеристики пересекаются в одной точке, соответствующей RД = − RЯ. Однако во втором квадранте они показаны условно пунктиром, так как RД не может быть отрицательным.
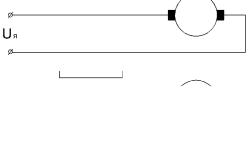
Токовые характеристики для рассматриваемого метода приведены на рис. 5.11. Горизонтальный участок характеристики соответствует вращению якоря двигателя с постоянной скоростью.
187
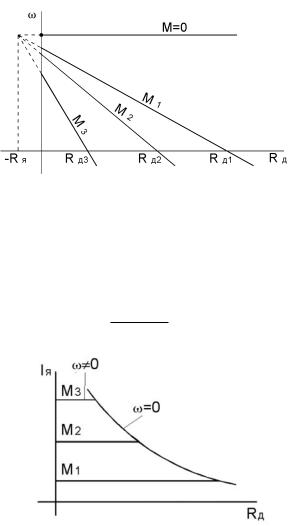
Рис. 5.10
При этом значение тока IЯ пропорционально моменту нагрузки и определяется выражением (1.3). Падающий участок характеристики соответствует ω = 0 и якорный ток определяется по закону Ома:
I Я = RЯU+ЯRД .
Рис. 5.11
Перечислим недостатки метода:
1. В режиме холостого хода (M = 0) скорость двигателя не регулируется.
188
2. Коэффициент передачи двигателя k = |
dω |
зависит от |
|
||
|
dRД |
|
момента нагрузки и отрицателен.
3.Жесткость механической характеристики изменяется при изменении RД.
4.Выполнение управляемого переменного сопротивления для использования в автоматических системах регулирования технически сложно.
5.На дополнительном сопротивлении RД расходуется дополнительная мощность.
6.Регулировочная характеристика получается нереверсивной. Именно в силу перечисленных недостатков этот метод
используется в основном в бытовой технике.
Полюсный метод управления ИДПТ. При полюсном методе управления управляющим сигналом является напряжение на обмотке возбуждения UВ. Схема метода показана на рис. 5.12. Напряжение якоря UЯ при этом остается постоянным.
Рис. 5. 12
Для того чтобы получить статические характеристики, рассмотрим основное уравнение двигателя (5.5). Очевидно, что поток возбуждения ФВ прямо пропорционален напряжению на обмотке возбуждения UВ. Тогда уравнение (5.5) можно переписать в таком виде:
189
ω = |
с1 |
− |
c2 |
M , |
(5.11) |
|
U B |
U B2 |
|||||
|
|
|
|
где c1 и c2 − константы.
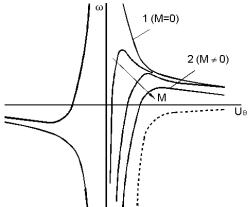
Это уравнение связывает входную (управляющую) величину UВ, выходную величину ω и нагрузочный параметр M. Регулировочные характеристики двигателя ω = f (UВ) при M = const получаются непосредственно из этого уравнения (рис. 5.13).
Рис. 5.13
Первое слагаемое определяет регулировочную характеристику холостого хода (M = 0). При M ≠ 0 из этой характеристики вычитается второе слагаемое, представленное на рисунке пунктиром. Результирующая характеристика представлена сплошной линией 2. Для других значений M характеристики представлены тонкими сплошными линиями. Для отрицательных значений UВ характеристики симметричны описанным относительно начала координат.
Из характеристики холостого хода видно, что при уменьшении UВ скорость ω стремится к ∞. Строго говоря, чисто холостой ход (M = 0) реализовать невозможно из-за трения в подшипниках, щетках и сопротивления воздуха. Но и при малых моментах нагрузки при уменьшении UВ скорость может возрастать до
190