

Михеев Исполнителные устройства автоматических 2008
.pdfнагрузке оно равно −IРАБ, которое соответствует −MН, так как при изменении направления вращения изменяет знак и момент трения (назовем условно режимом а). Если в момент t0 (ω = 0) отключить − UЯ, то двигатель остановится (режим б). Диаграммы для режима б на рис. 5.25 показаны пунктиром.
Как и в случае динамического торможения для ограничения величины тормозного тока можно использовать включение RД или уменьшение UВ.
Рекуперативное торможение. Различают два вида рекуперативного торможения. Первый заключается в том, что момент нагрузки изменяет свой знак на противоположный. Например, троллейбус или электромобиль сначала поднимался в гору, а затем пошел под гору, применяя торможение двигателем. При этом двигатель начинает увеличивать скорость до величины ω> ωХХ. Ток якоря становится отрицательным, так как E становится больше, чем UЯ. Момент двигателя уравновешивает изменившийся момент нагрузки −MН. На рис. 5.26, а показано изменение положения рабочей точки на механической характеристике, а на рис. 5.26, б − временные диаграммы работы двигателя. Как видно из временных диаграмм при торможении UЯ > 0, а IЯ < 0, следовательно, электрическая энергия отрицательна, т. е. она возвращается в источник питания.
а) |
б) |
|
Рис. 5.26 |
|
201 |

Второй тип рекуперативного торможения заключается в том, что напряжение на якоре UЯ1 резко уменьшается до величины UЯ2, но остается положительным. При этом ЭДС якоря E становится больше UЯ2, а ток якоря IЯ − отрицательным. Тормозной момент уменьшает скорость вращения до величины, соответствующей новому значению UЯ2 (точка C). На рис. 5.27 изображены диаграммы, поясняющие работу двигателя в этом режиме.
Из временных диаграмм видно, что в интервале t1 ÷ t2 ток якоря отрицателен, а напряжение на якоре положительно. Это означает, что в этом промежутке времени электрическая энергия возвращается в источник питания.
Пусковые режимы. При пуске двигателя в момент подачи напряжения на якорь скорость вращения ω и ЭДС якоря E равны 0.
Это означает, что ток якоря в первый момент равен (если пренебречь электрической постоянной времени):
Iторм = |
U Я |
. |
(5.16) |
|
|||
|
RЯ |
|
|
а) |
б) |
|
Рис. 5.27 |
Обычно эта величина более, чем на порядок превышает номинальную величину рабочего тока. Поэтому при простейшей схеме включения двигателя (рис. 5.28) в питающей сети
202
наблюдаются значительные броски тока, которые в ряде случаев являются недопустимыми.
Рис.5.28
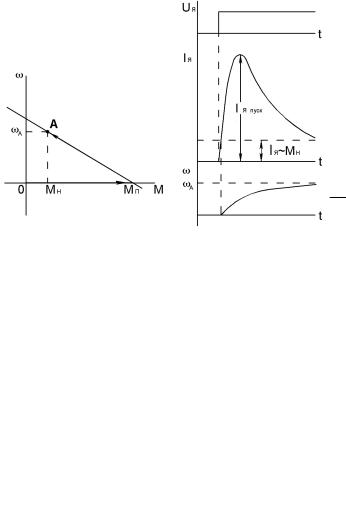
На рис. 5.29 приведены диаграммы, поясняющие работу двигателя в пусковом режиме. В момент включения UЯ ток якоря
нарастает по экспоненте с постоянной времени TЯ = LЯ . Она
RЯ
обычно много меньше механической постоянной времени TМ,
а) |
б) |
|
|
|
Рис. 5.29 |
поэтому за время нарастания тока якоря скорость вращения увеличивается незначительно, и можно с достаточной степенью точности считать, что Iпуск будет определяться выражением (5.16).
203
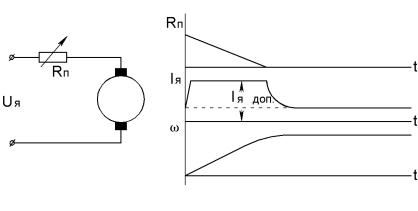
Пусковой момент MП, найденный по механической характеристике, будет пропорционален пусковому току. По мере увеличения скорости ω до величины ωА рабочая точка перемещается по механической характеристике в точку A, соответствующую моменту нагрузки MН. В пусковом режиме для ограничения величины пускового тока желательно иметь большое RЯ. Однако это противоречит желанию иметь в статике возможно большую жесткость механической характеристики и, следовательно, малое RЯ. Это противоречие можно устранить, если вводить дополнительное сопротивление в цепь якоря только на время пуска. Если вводить постоянное сопротивление, то это сильно увеличит время разгона двигателя. Идеально было бы иметь переменное плавно изменяющееся сопротивление, которое ограничивало бы ток якоря на допустимой величине IЯдоп, как показано на рис. 5.30.
Рис. 5.30
На практике проще ступенчато изменять пусковое сопротивление, как показано на рис. 5.31.
Можно предложить также ряд схем с транзистором, типа той, которая приведена на рис. 5.32. Ток якоря протекает по открытому транзистору Т. В цепь якоря включено сопротивление r << RЯ, которое не влияет на работу двигателя. Напряжение, снимаемое с
204
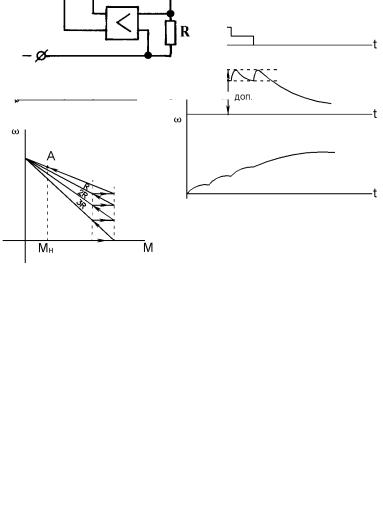
сопротивления r, усиливается и подается на базу транзистора Т. При достижении током якоря предельно допустимого значения транзистор Т начинает закрываться, ограничивая таким образом ток якоря.
а)
в)
б)
Рис. 5.31
Рис. 5.32
205

5.2.5. Импульсное управление ИДПТ
При непрерывном управлении ИДПТ на выходных каскадах усилителя выделяется мощность, сравнимая с мощностью управляемого двигателя. При мощностях двигателя в несколько десятков или сотен ватт выходные каскады усилителя мощности должны выполняться с эффективными радиаторами для отвода тепла. Это удорожает конструкцию, увеличивает габариты и уменьшает надежность усилителя мощности. В качестве альтернативы, устраняющей эти недостатки, применяется импульсное управление ИДПТ.
Мощность, выделяемая на выходных каскадах при импульсном управлении, в десятки раз меньше, чем при непрерывном управлении. Это объясняется тем, что они работают в режиме ключей (открыт - закрыт), и мощность, выделяемая выходными транзисторами (тиристорами), определяется произведением тока в открытом состоянии на напряжение насыщения, составляющее обычно 0,5÷2 В. Для маломощных двигателей (десятки ватт) выходные ключи можно использовать без радиаторов, а при больших мощностях обойтись небольшими радиаторами.
Сущность импульсного управления состоит в том, что регулирование скорости вращения достигается не за счет изменения напряжения управления, подводимого к якорю двигателя, а за счет изменения времени, в течение которого подводится номинальное напряжение UЯном. На якорь двигателя подается последовательность импульсов амплитудой UЯном. Длительность импульсов tИ или период их следования T изменяются так, что изменяется относительное время подключения напряжения к якорю. Во время импульса скорость ω будет увеличиваться, а во время паузы уменьшаться за счет торможения моментом нагрузки или специального режима торможения. В результате скорость ω будет колебаться около некоторой средней скорости ωСР, величина которой зависит от относительной
длительности импульсов ε = tTИ (рис. 5.33).
206
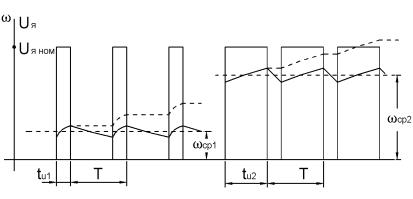
Если во время паузы якорь не тормозится, то скорость вращения будет непрерывно увеличиваться и достигнет значения скорости холостого хода (на рис.5.33 показано пунктиром).
Величина колебаний угловой скорости ω относительно установившегося значения ωСР зависит от соотношения периода следования импульсов T и электромеханической постоянной времени TМ. При T << TМ величина колебаний ∆ω будет незначительной.
|
|
Рис. 5.33 |
|
|
|
Основные |
схемы |
импульсного |
управления |
ИДПТ |
|
представлены |
на рис. |
5.34. |
Вместо |
контактов |
реле |
используются |
транзисторные |
или тиристорные ключи. При |
|||
наличии механического |
торможения можно использовать схему |
||||
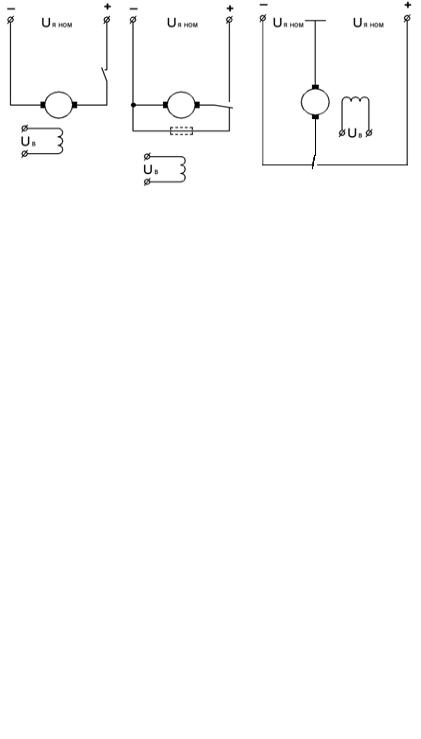
управления с разрывом цепи якоря во время паузы (рис. 5.34, а). Если механического торможения нет, то можно использовать схему с динамическим торможением во время паузы между импульсами (рис. 5.34, б). Во время паузы якорь закорачивается или в его цепь включается дополнительное сопротивление (показано пунктиром). На рис. 5.34, в приведена схема управления двуполярными импульсами, позволяющая осуществить реверсивное управление ИДПТ.
Режим работы двигателя существенно зависит от выбора периода следования импульсов управления T, а именно, от его
207
соотношения с постоянными времени двигателя. Время разгона и торможения двигателя определяется электромеханической
а) |
б) |
в) |
Рис. 5.34
постоянной времени TМ, которая зависит от инерционности якоря и нагрузки.
Процесс установления тока в обмотке якоря определяется электрической постоянной времени якоря TЯ=LЯ/RЯ. Причем обычно TЯ << TМ.
Рассмотрим сначала крайние случаи выбора T.
1.Если T > TМ > TЯ, то все процессы, в том числе и установление скорости вращения заканчиваются за время длительности импульса, а за время паузы скорость вращения успевает упасть до нуля.
Временные диаграммы работы двигателя в этом режиме приведены на рис. 5.35. При таком выборе T мы будем иметь режим включения и выключения двигателя, а не режим импульсного управления.
2.Второй крайний случай будет иметь место при T << TЯ < TМ.
Вэтом случае при использовании схемы рис. 5.34, б или 5.34, в установится режим непрерывных токов, так как за счет индуктивности якоря ток во время паузы будет протекать в том же направлении, что и во время импульса. Якорь в данном случае
действует как линейный |
фильтр |
нижних |
частот. Он |
208

реагирует |
только |
на постоянную составляющую импульсов |
|||||
напряжения, которая равна: |
|
|
|
||||
|
U |
Яср |
= |
U Я.номtИ |
= εU |
Я.ном . |
(5.17) |
|
T |
||||||
|
|
|
|
||||
Рис. 5.35
За период следования импульсов ток якоря IЯ и момент M изменяются незначительно, и можно использовать основное уравнение двигателя для непрерывного управления (5.8), в которое вместо UЯ нужно подставить UЯ ср (5.17):
ω = kД UЯ ном ε − kД2RЯ M. |
(5.18) |
Введем относительные величины для скорости вращения и момента: относительную скорость вращения (отношение угловой скорости к скорости холостого хода при UЯ = UЯ ном):
λω = ω
ωХХ
и относительный момент (отношение действующего момента к пусковому моменту при UЯ = UЯ ном):
λM = M . M П
209
Рассмотрим уравнение (5.8) управления при UЯ = UЯ ном:
ω = kД UЯ ном
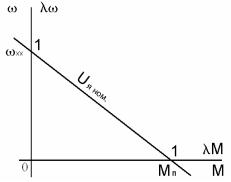
Механическая характеристика, уравнению, приведена на рис. 5.36.
для непрерывного режима
− kД2RЯ M. |
(5.19) |
построенная по |
этому |
Рис. 5.36
Из (5.19), положив M = 0, получим:
ωХХ = kД UЯ ном. |
(5.20) |
||||
а положив ω = 0, получим: |
|
|
|
||
0 = kД UЯ ном − kД2RЯ MП. |
(5.21) |
||||
Подставив (5.20) в (5.21), получим: |
|
|
|
||
|
ωХХ = kД2RЯ MП. |
(5.22) |
|||
Разделив (5.19) на (5.22), получим: |
M |
|
|
||
|
ω |
=1− |
(5.23) |
||
|
|
M П |
|||
|
ωXX |
|
|||
или уравнение механической характеристики в относительных
единицах при UЯ = UЯ ном при непрерывном управлении: |
|
λω = 1 − λM. |
(5.24) |
Если разделить (5.18) на (5.22), то получим уравнение двигателя в относительных единицах при импульсном управлении:
λω = ε − λM. |
(5.25) |
210 |
|