

Михеев Исполнителные устройства автоматических 2008
.pdfнедопустимо больших величин. Поэтому при отключении ИДПТ нельзя выключать сначала UВ, а затем UЯ.
Механические характеристики ω = f (M) при UВ = const представлены на рис. 5.14. Из уравнения (5.11) видно, что характеристики имеют падающий характер. При этом скорость
холостого хода ωХХ |
1 |
, а пусковой момент MП UВ. |
|
||
|
U B |
|
Рис. 5.14
Токовая характеристика IЯ = f(UВ) при M = const приведена на рис. 5.15. При малых значениях UВ пусковой момент двигателя меньше момента нагрузки на валу, поэтому якорь двигателя не
Рис. 5.15
191
вращается (при пассивной нагрузке). Тогда |
I Я |
= |
U Я |
= const. При |
|
||||
|
|
|
RЯ |
|
увеличении UВ растет пусковой момент MП, и когда он становится больше момента нагрузки MН, якорь двигателя начинает вращаться, и в установившемся режиме ток якоря определяется выражением
(5.3): I |
Я |
= |
M |
|
1 |
, т. е. падает с ростом UВ. |
cФB |
|
|||||
|
|
|
U B |
|||
При активной нагрузке горизонтального участка характеристики не будет (пунктир на рис. 5.15), так как при MД меньшем MН якорь вращается в обратном направлении, и ток определяется выражением (5.3).
Полюсный метод управления имеет преимущество перед якорным методом только в меньшей мощности сигнала управления. По другим параметрам он уступает якорному методу:
жесткость механической характеристики изменяется; коэффициент передачи dω/dUВ является переменным;
нужно защищать цепь возбуждения от разрыва, сначала отключать UЯ, а затем UВ.
Реостатно-полюсный метод управления. Управление скоростью вращения достигается за счет изменения сопротивления в цепи обмотки возбуждения (рис. 5.16).
Поток возбуждения ФВ |
1 |
, где RВ = RД + rВ. |
|
||
|
|
||||
|
|
RB |
|
|
|
Уравнение (5.5) можно переписать в таком виде: |
|
||||
ω = c R |
B |
−c |
2 |
R2 M , |
(5.12) |
1 |
|
B |
|
||
где c1 и c2 − константы.
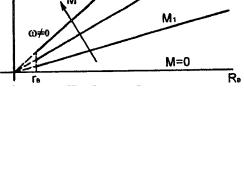
Регулировочные характеристики ω = f (RВ ) при M = const, полученные из этого уравнения, приведены на рис. 5.17. Очевидно, что при M = 0 характеристика линейна, а при M ≠ 0 − имеет максимум.
Начальный участок характеристик (показан пунктиром) не реализуется из-за сопротивления rВ самой обмотки возбуждения.
192

Рис. 5.16 |
|
|
Рис. 5.17 |
|
Механические |
характеристики ω = f (M) при RВ = const |
|||
представлены на |
рис. 5.18. |
Из выражения (5.12) видно, что ωХХ |
||
RВ, а пусковой момент MП |
|
1 |
. |
|
|
||||
|
|
|
RB |
|
Рис. 5.18
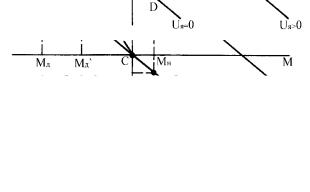
Токовые характеристики IЯ = f (RВ ) при M = const приведены на рис. 5.19. Наклонный участок характеристик соответствует ω ≠ 0, когда якорный ток определяется соотношением (5.3), и
следовательно IЯ RВ (так как ФВ |
1 |
). Горизонтальный участок |
|
||
|
RB |
|
характеристик соответствует ω = 0. При этом ЭДС якоря отсутствует, и ток якоря определяется законом Ома (5.10). В
193
режиме холостого хода (M = 0) ток якоря равен нулю, так как он пропорционален M.
Приведенные на рис. 5.19 характеристики соответствуют пассивной нагрузке на валу двигателя (момент трения). Если нагрузка активная (висящий на тросе груз), то двигатель не останавливается при MД < MН, а начинает вращаться в обратном направлении (в сторону момента нагрузки). Ток якоря при этом будет определяться соотношением (5.3) и горизонтального участка не будет (показано пунктиром).
Рис. 5.19
Реостатно-полюсный метод управления имеет все преимущества и недостатки полюсного метода и дополнительно− нереверсивность регулировочной характеристики.
Из сравнения рассмотренных методов управления скоростью двигателя можно сделать вывод, что с точки зрения использования в системах автоматического регулирования лучшим является якорный метод управления. При этом методе статические характеристики линейны, а коэффициент передачи kД и жесткость механической характеристики постоянны. Именно поэтому данный метод чаще всего используется в САР.
194

5.2.4. Тормозные и пусковые режимы ИДПТ
Тормозные режимы используются для улучшения динамических характеристик ИДПТ. Если отключить двигатель и не применять специального торможения, то он будет тормозиться нагрузкой на валу (трением). Такой режим называется свободным выбегом. При малой величине момента трения время торможения может быть недопустимо большим.
Рассмотрим три тормозных режима.
Режим динамического торможения. При отключении напряжения якоря якорная цепь не разрывается и сохраняется возможность для протекания якорного тока. Возможная схема приведена на рис. 5.20.
До отключения ток якоря определялся выражением:
I Я |
= |
U Я − E |
. |
(5.13) |
|
||||
|
|
RЯ |
|
|
Рис. 5.20
После отключения UЯ и замыкания якоря накоротко ток якоря будет равен:
I Я = − |
E |
. |
(5.14) |
|
|||
|
RЯ |
|
|
Переходным процессом в цепи якоря пока пренебрегаем. Этот режим удобно рассмотреть по механическим характеристикам (рис.
195
5.21). На рисунке изображены две механические характеристики (для UЯ > 0 и для UЯ = 0). Если момент нагрузки на валу двигателя MН, то режим двигателя до отключения UЯ определяется точкой A. В момент отключения UЯ скорость вращения двигателя практически не изменяется и режим двигателя определяет точка B на характеристике, соответствующей UЯ = 0. На якорь действует тормозной момент MД −MН, который уменьшает скорость вращения. Это соответствует перемещению рабочей точки по механической характеристике в точку C или в точку D. Если момент на валу определяется пассивной нагрузкой (трение), то при ω = 0 (точка C)
Рис. 5.21
момент двигателя MД и момент нагрузки MН становятся равными нулю, так как момент трения существует только тогда, когда существует MД. Если нагрузка активная (висящий груз), то установится режим, соответствующий точке D, когда момент нагрузки уравновесится моментом двигателя. При этом скорость ωД будет отрицательной (груз движется равномерно, вращая двигатель в обратном направлении). Очевидно, что в случае активного момента для полной остановки двигателя необходимо иметь дополнительные тормозные устройства, которые должны включаться при ω = 0 (в точке C).
196
Следует отметить, что на рис. 5.21 только точки A, C и D соответствуют установившемуся (статическому) режиму. Перемещение рабочей точки из т. A в т. B и дальнейшее перемещение по характеристике в т. C или D соответствует переходному (динамическому) режиму.
Длительность переходного режима определяется моментами сил и моментами инерции подвижных частей (электрической постоянной времени пренебрегаем). Определить длительность переходного процесса по механическим характеристикам невозможно. Но можно определить максимальный тормозной момент MД, который действует в режиме динамического торможения. Из рисунка видно, что он может значительно превосходить момент нагрузки, что не всегда является допустимым. Для уменьшения тормозного момента при динамическом торможении в цепь якоря включается дополнительное сопротивление RД (показано пунктиром на рис. 5.20). Механическая характеристика в этом случае показана на рис.
5.21 пунктиром. В начальный момент торможения |
(точка B′) |
|||
тормозной момент будет равен M′Д < MД. |
характеризуется |
|||
Режим |
динамического |
торможения |
||
значительными по величине тормозными токами якоря IТОРМ. Они могут превосходить рабочие токи якоря IРАБ в десятки раз. Включение RД в цепь якоря уменьшает тормозные токи, увеличивая при этом время торможения. На рис. 5.22 показаны временные
диаграммы UЯ, IЯ и ω .
При отключении UЯ ток IЯ нарастает по экспоненте с постоянной
времени TЯ |
= |
LЯ |
до величины I Я = − |
E |
, а затем, по мере |
RЯ |
|
||||
|
|
|
RЯ |
||
уменьшения скорости ω (и следовательно E) уменьшается с механической постоянной времени. В случае активной нагрузки (кривая 1) ток якоря стремится к значению IРАБ, которое соответствует моменту нагрузки MН. При пассивной нагрузке (кривая 2) IЯ → 0, так как якорь остановится и E = 0. В том случае, когда в цепь якоря включается дополнительное сопротивление RД,
197
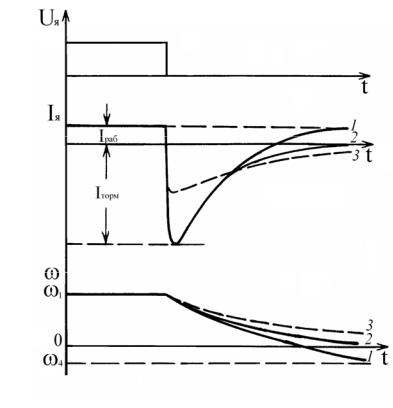
максимальное значение тока Iторм = − |
E |
, а торможение (и, |
RЯ + RД |
следовательно, уменьшение IЯ) происходит с большей постоянной времени (пунктирная кривая 3).
Рис. 5.22
Уменьшение тормозного тока якоря можно достичь также уменьшением напряжения возбуждения UВ. Жесткость механической характеристики при этом уменьшается (1.7) и это будет эквивалентно включению RД (характеристика 2 на рис. 5.21).
Торможение противовключением. Схема подключения двигателя показана на рис. 5.23.
198
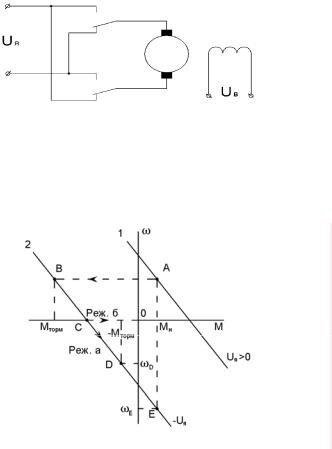
Рис. 5.23
При отключении двигателя на якорь подается напряжение обратной полярности −UЯ. На рис. 5.24 приведены механические характеристики, соответствующие напряжениям на якоре UЯ и −UЯ.
Рис. 5.24
Точка A на характеристике 1 соответствует установившемуся режиму работы двигателя при напряжении на якоре UЯ > 0 и моменте нагрузки на валу MН. При переключении контактов на якорь двигателя подается напряжение −UЯ. Рабочая точка перемещается из точки A в точку B, а затем в точку D (при пассивной нагрузке) или в точку E (при активной нагрузке), где устанавливается отрицательная скорость вращения ωД или ωЕ.
199

Если целью тормозного режима является полная остановка двигателя, то необходимо в точке C (когда ω = 0) отключить напряжение от якоря при пассивной нагрузке, а при активной − включить дополнительное тормозное устройство.
Временные диаграммы UЯ, IЯ и ω приведены на рис. 5.25.
Рис. 5.25
Отличие этих диаграмм от диаграмм при динамическом торможении (см. рис. 5.22) следующее. Максимальное значение тормозного тока IТОРМ более чем в два раза превышает аналогичное значение тока при динамическом торможении (5.14), так как оно равно:
IТОРМ |
= |
−U Я |
− E |
, |
а UЯ > E. |
(5.15) |
RЯ |
|
|||||
|
|
|
|
|
|
|
Установившееся значение |
тока |
при активной |
нагрузке |
|||
равно IРАБ, которое соответствует MН (точка E), а при пассивной
200