

Михеев Исполнителные устройства автоматических 2008
.pdf70 %), но из-за большой инерционности якоря электромеханическая постоянная времени для двигателей малой мощности TМ = 0,05÷
÷0,15 с.
Двигатели с возбуждением от постоянных магнитов (серия ДПМ) отличаются по конструкции от предыдущих только тем, что вместо обмоток возбуждения используются постоянные магниты. Якорь такой же, как в предыдущем случае, и характеристики также мало отличаются. Очевидно, что такие двигатели могут использовать только якорное управление.
В двигателях с полым немагнитным ротором (серия ДПР)
используется ротор в виде пластмассового стакана 2, в который впрессована обмотка якоря (рис. 5.44). Магнитный поток возбуждения создается внутренним статором 3, который
Рис. 5.44
представляет собой цилиндрический постоянный магнит с радиальной намагниченностью. Внешний статор выполнен из магнитомягкого материала и является магнитопроводом. Щетки 5 и коллектор 4 выполнены так же, как в классической машине. Якорь и коллектор насажены на вал 7, который вращается в подшипниках 8. Момент инерции якоря такого двигателя значительно меньше, чем момент инерции якоря барабанного типа.
221
Внешний и внутренний статоры жестко закреплены в корпусе 6. Постоянные магниты могут быть расположены и на внешнем статоре. Электромеханическая постоянная времени двигателей с полым ротором меньше, чем у двигателей с барабанным якорем и составляет TМ=0,015÷0,02 с.
Двигатели с дисковым якорем (серия ПЯ) выполнены с плоским воздушным зазором (рис. 5.45). Возбуждение двигателя осуществляется постоянными магнитами 1 с полюсными наконечниками 4 из магнитомягкой стали в виде кольцевых сегментов. Магнитный поток проходит аксиально через воздушный зазор и замыкается по кольцам 2 и 3 из магнитомягкой стали. В воздушном зазоре вращается плоский немагнитный диск 5 с нанесенными на его поверхность проводниками. Расположение проводников на диске показано на рис.5.46. Роль коллектора могут играть неизолированные участи проводников, по которым скользят щетки 6 (см. рис. 5.45). Проводники на диск наносятся фотохимическим способом.
Рис.5.45
На рис. 5.46 показаны также направление токов в проводниках якоря и направление магнитных силовых линий. При похождении тока по обмотке якоря возникает вращающий момент, направленный в плоскости якоря. Момент инерции дискового якоря
222
значительно меньше, чем у барабанного, что и является одним из основных преимуществ этого двигателя.
Рис. 5.46
Перечислим кратко основные преимущества двигателей с полым и дисковым якорем:
меньший момент инерции якоря (малая TМ); малая величина TЯ (так как мала LЯ);
в магнитопроводе отсутствуют потери на вихревые токи; отсутствие зубцов якоря уменьшает пульсации момента, что
приводит к уменьшению шума двигателя; из-за уменьшения массы якоря и отсутствия сил притяжения
якоря к статору уменьшаются механические потери на трение в подшипниках и напряжение трогания;
технологичность изготовления якоря.
КПД и масса двигателей с полым или дисковым якорем приблизительно такие же, как у двигателей с барабанным якорем.
К недостаткам двигателей с полым и дисковым якорем относятся следующие:
малая долговечность из-за быстрого износа меди печатных проводников в месте установки щеток ( для дискового якоря );
меньшая надежность работы при высоких температурах, вибрациях и ударах из-за более высокой вероятности деформации якоря в таких условиях.
223
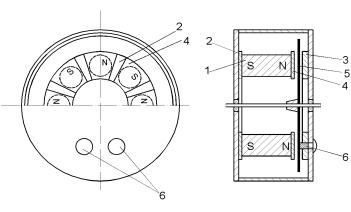
Бесконтактные ИДПТ (серия МБ) используют полупроводниковый коммутатор вместо щеточно-коллекторного контакта, выполняющего в двигателе роль коммутатора. Конструкция бесконтактного ИДПТ представлена на рис. 5.47 [4].
Рис. 5.47
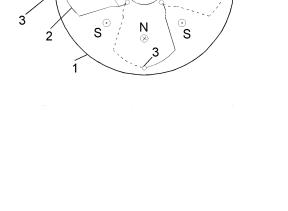
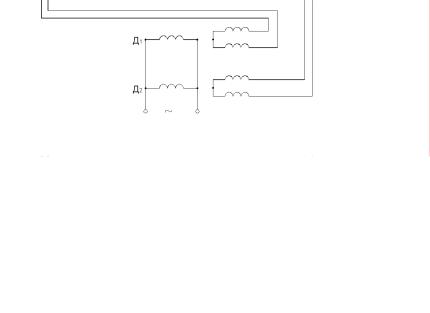
Ротор 3 выполнен в виде постоянного магнита, а статор 1 имеет две катушки 2 которые при протекании по ним тока создают магнитные поля во взаимно перпендикулярных направлениях. Взаимодействие поля статора с полем ротора создает вращающий момент, величина которого пропорциональна синусу угла между направлением магнитных силовых линий ротора и статора (M=Mmsinθ). На валу ротора насажен ферромагнитный диск 4 с вырезом вдоль окружности на дуге 180°. Два трансформаторных датчика Д1 и Д2 выдают сигнал на коммутатор в то время, когда напротив датчика находится прорезь и один из трех стержней датчика не перекрывается диском. По сигналу с датчиков на катушки статора К1 и К2 подается напряжение либо одной, либо
224
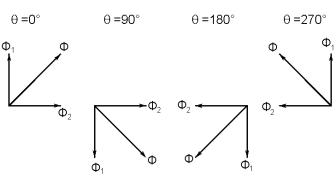
противоположной полярности. Таким образом, при вращении ротора через каждые 180° поворота ротора напряжение на катушках изменяется на противоположное. Датчики Д1 и Д2 сдвинуты по окружности относительно друг друга на 90°, поэтому и сигналы на катушках К1 и К2 будут сдвинуты на 90°. Направления магнитных потоков Ф1 и Ф2, создаваемых катушками К1 и К2, и суммарного потока Ф через каждые 90° угла поворота ротора показаны на рис. 5.48. Из рисунка видно, что вектор суммарного магнитного поля изменяет свое направление скачками при повороте ротора через каждые 90°.
При правильном расположении датчиков переключение одной из катушек статора происходит в момент, когда угол между вектором поля ротора и вектором поля статора θ = 45°. При переключении катушек он изменяется на 90° и становится равным 135°. Таким образом, вращающий момент двигателя будет изменяться в пределах 0,7÷1,0 Mm, т.е. будет пульсировать в значительных пределах. Для уменьшения пульсации вращающего момента нужно увеличивать количество катушек и, соответственно, датчиков положения ротора (обычно не более 3 ÷ 4).
Рис. 5.48
В описанной конструкции катушки статора выполняют такую же роль, как обмотки якоря в классической машине, поэтому бесконтактные двигатели называют обращенными машинами (ротор и статор поменялись ролями). Частота переключения
225
катушек статора определяется угловой скоростью ротора, поэтому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя постоянного тока с независимым возбуждением.
Замена щеточно-коллекторного контакта полупроводниковым коммутатором увеличивает надежность и долговечность двигателя. Он создает меньше радиопомех по сравнению с коллекторным двигателем.
5.2.8. Универсальные коллекторные двигатели
Универсальные коллекторные двигатели (УКД) могут работать как от сети постоянного тока, так и от сети переменного тока. Конструкция УКД принципиально не отличается от конструкции коллекторного двигателя постоянного тока. Однако для уменьшения потерь из-за вихревых токов в магнитопроводе статор
иротор выполняются шихтованными, т. е. набираются из тонких изолированных пластин. Кроме того, обмотки возбуждения выполняются с отводами для того, чтобы иметь возможность уменьшать количество витков обмотки возбуждения (и
следовательно LВ) при работе от сети переменного тока. Таким образом удается сблизить рабочие характеристики двигателя при работе от сетей постоянного и переменного тока. УКД может быть выполнен с независимым (рис. 5.49, а), параллельным (рис. 5.49, б)
ипоследовательным (рис. 5.49, в) возбуждением.
Работа УКД на переменном токе имеет ряд особенностей, которые отличают ее от работы на постоянном токе.
1. При работе УКД от сети переменного тока ток якоря и магнитный поток возбуждения изменяются по синусоидальному закону, причем в общем случае они сдвинуты по фазе:
IЯ= IЯmsin(ωсt +ϕ); ФВ = ФВm sinωСt,
где ωС − частота сети; ϕ − сдвиг по фазе между током якоря и током возбуждения.
226
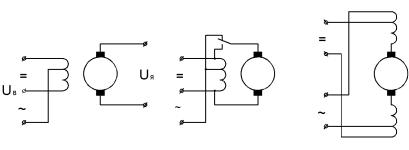
Рис. 5.49
Значение вращающего момента двигателя определяется выражением:
M Д = cФB I Я = 0,5cФBm I Яm [cosϕ −cos(2ωсt +ϕ)] . |
(5.45) |
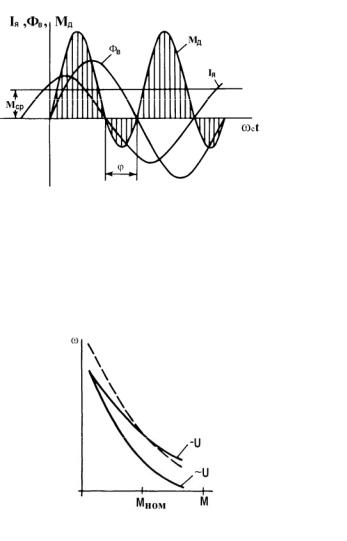
На рис. 5.50 показано изменение IЯ,ФВ, MД во времени. Из рисунка видно, что большую часть периода направление вращающего момента MД не изменяется, так как ток якоря и магнитный поток возбуждения одновременно изменяют направление. Однако из-за сдвига фаз ϕ между током якоря и потоком возбуждения в некоторые моменты MД становится отрицательным, т.е. тормозит вращение якоря. При значительном моменте инерции якоря непостоянство вращающего момента на работу двигателя практически не влияет.
Среднее значение вращающего момента получим, проинтегрировав выражение (5.45) за половину периода:
|
|
|
Т |
|
|
|
2 |
2 |
|
|
|
M CP = |
|
|
∫0 |
(5.46) |
|
T |
|||||
|
|
|
М Д dt = cФBm I Яm cosϕ . |
||
Из полученного выражения видно, что наибольший вращающий момент имеет место при ϕ = 0. В двигателе с параллельным и независимым возбуждением этого можно достичь применением
227
фазосдвигающих цепей. В двигателе с последовательным возбуждением по обмотке возбуждения и по якорю протекает один и тот же ток, поэтому условие ϕ = 0 выполняется автоматически.
Рис. 5.50
В настоящее время УКД выполняют только с последовательным возбуждением, причем обмотка возбуждения делится на две части, включаемые с разных сторон якоря (см. рис. 5.49, в). Такое включение позволяет уменьшить радиопомехи из-за искрения щеточно-коллекторного контакта.
Рис. 5.51
228
2.Характеристики УКД при питании от сети переменного тока хуже, чем при питании от сети постоянного тока. Причина заключается в том, что при работе на переменном токе сказывается
влияние LЯ и LВ, поэтому механическая характеристика становится более мягкой, особенно при больших нагрузках (рис. 5.51).
Уменьшение числа витков обмотки возбуждения увеличивает ток, протекающий по якорю и обмотке возбуждения. При этом поток возбуждения изменяется незначительно, так как основное сопротивление цепи при последовательном возбуждении
составляет индуктивное сопротивление обмотки возбуждения LВ. Поэтому уменьшение числа витков обмотки возбуждения компенсируется почти пропорциональным увеличением тока. Механическая характеристика при этом приподнимается, не меняя своей жесткости (пунктирная линия на рис. 5.51). Таким образом, достигается наибольшее сближение характеристик при номинальной нагрузке.
КПД двигателя при работе от сети переменного тока меньше, чем при работе на постоянном токе за счет потерь в стали.
3.При работе УКД от сети переменного тока существенно ухудшается коммутация и усиливается искрение под щетками. Это объясняется тем, что катушка, замыкаемая щеткой, пронизывается переменным потоком возбуждения, и в ней наводится трансформаторная ЭДС и, следовательно, при замыкании возникают значительные токи и искрения. Это ограничивает применение УКД в автоматических системах.
УКД достаточно широко распространены в бытовой технике благодаря ряду положительных качеств:
УКД работают от источников постоянного и переменного токов; при работе от любого из источников позволяют регулировать
скорость в широких пределах (как ИДПТ); позволяют получать на промышленной частоте весьма высокую
угловую скорость вращения якоря (до 2000 рад/с), что невозможно при использовании синхронных и асинхронных двигателей.
229
5.3.Асинхронные двигатели
5.3.1.Принцип действия асинхронного двигателя
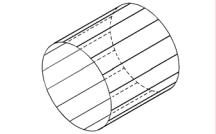
Необходимым условием реализации асинхронного двигателя (АСД) является наличие вращающегося магнитного поля. Вектор магнитного потока Ф поворачивается и описывает своим концом круг или эллипс. Ротор АСД выполняется короткозамкнутым, например в виде «беличьей клетки» (рис. 5.52). В нем наводится ЭДС и течет ток, который взаимодействует с вращающимся магнитным полем. Возникающий при этом момент поворачивает ротор вслед за магнитным полем.
Рис. 5.52
Для получения вращающегося магнитного поля необходимо иметь по, крайней мере, две обмотки возбуждения или две фазы. На рис. 5.53 условно показаны две обмотки (фазы) АСД, расположенные в пространстве под углом β = 90°. На обмотки подаются переменные напряжения, сдвинутые по фазе на угол ϕ = =90° (рис. 5.54, а). На рис. 5.54, б показано положение суммарного вектора магнитного потока в пространстве в различные моменты времени. Очевидно, что за один период питающего напряжения вектор магнитного потока повернется на 2π радиан, т.е. он будет вращаться с частотой сети ωС.
Из этих рассуждений можно сделать следующие выводы:
230