

Mekhanika_ver4
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет автоматизации машиностроения
Кафедра материаловедения и основ конструирования
М. А. МЕЛЬЧАКОВ
В. А. ВЛАСОВ
МЕХАНИКА
Практикум
Киров
2014
1
УДК 531(07) М487
Допущено к изданию методическим советом факультета автоматизации машиностроения ФГБОУ ВПО «ВятГУ» в качестве практикума для студентов направлений: 140400.62 «Электроэнергетика и электротехника», 240100.62 «Химическая технология», 261400.62 «Технология художественной обработки материалов», 261700.62 «Технология полиграфического и упаковочного производства» для всех профилей подготовки, всех форм обучения
Рецензент
кандидат технических наук, доцент кафедры технологии машиностроения ФГБОУ ВПО «ВятГУ» Е. А. Куимов
Мельчаков, М. А.
М487 Механика: практикум / Мельчаков М. А., Власов В. А. – ФГБОУ ВПО «ВятГУ», 2014. – 77 с.
УДК 531(07)
В практикуме излагаются методика и последовательность выполнения лабораторной работы по дисциплинам «Механика», «Прикладная механика».
Тех. редактор Е. О. Гладких
© ФГБОУ ВПО «ВятГУ», 2012
2
Содержание |
|
Введение........................................................................................................... |
4 |
1. Основы теоретической механики................................................................ |
5 |
1.1. Плоская система сил. Усилия в стержнях ............................................ |
9 |
1.2. Пространственная система. Усилие в стержнях ................................ |
12 |
1.3. Определение центра тяжести геометрических сечений..................... |
15 |
1.4. Определение основных геометрических характеристик составного |
|
сечения ........................................................................................................ |
19 |
2. Основы сопротивления материалов.......................................................... |
24 |
2.1. Растяжение, сжатие.............................................................................. |
28 |
2.2. Кручение............................................................................................... |
37 |
2.3. Изгиб..................................................................................................... |
50 |
2.4. Устойчивость сжатых стержней. Продольный изгиб ........................ |
80 |
2.5. Сдвиг. Смятие и срез ........................................................................... |
88 |
Приложение А Размеры и справочные величины для швеллеров .............. |
91 |
Приложение Б Размеры и справочные величины для уголков |
|
равнополочных............................................................................................... |
92 |
Приложение В Размеры и справочные величины для двутавров................ |
95 |
Приложение Г Основные параметры простейших сечений ........................ |
96 |
Список рекомендуемой литературы ............................................................. |
99 |
3
Введение
Наиболее распространенным методом расчета деталей машин и эле-
ментов сооружений на прочность является расчет по напряжениям. В ос-
нову этого метода положено предположение, что критерием надежности конструкции является напряжение или, точнее говоря, напряженное состо-
яние в точке. Последовательность расчета при этом выглядит следующим образом.
На основании анализа конструкции выявляется та точка в теле, где возникают наибольшие напряжения. Найденная величина напряжений со-
поставляется с предельной величиной для данного материала, полученной на основе предварительных лабораторных испытаний. Из сопоставления найденных расчетных напряжений и предельных напряжений делается за-
ключение о прочности конструкции.
В настоящем учебно-методическом пособии по курсу «Механика» и «Прикладная механика» рассматриваются вопросы по разделам «Основы теоретической механики» и «Основы сопротивления материалов» предна-
значенные для ознакомления студентов с общим принципом расчетов на прочность, жесткость и устойчивость основных деталей машин.
4
1. Основы теоретической механики
Теоретическая механика – это наука, в которой изучается механиче-
ское движение тел, и устанавливаются общие законы этого движения. Тео-
ретическая механика разделяется на статику, кинематику и динамику.
В данном пособии рассмотрен только раздел статики, т. к. он являет-
ся основополагающим для последующего раздела – «Основы сопротивле-
ния материалов» Статика – это раздел теоретической механики, в которой изучаются
законы приведении и условия равновесия сил, действующих на материаль-
ные точки.
Математические тела взаимодействуют друг с другом посредством сил. Понятие силы определяется тремя факторами:
−точкой приложения силы;
−направлением силы;
−численным значением силы.
Точкой приложения силы называется та часть данного математиче-
ского тела, на которую эта сила воздействует. Под направлением данной силы понимают направление того перемещения, которое получает под действием этой силы данная точка. Прямая, по которой направлена данная сила, называется линией действия этой силы.
Силы подразделяются, по способу приложения:
−Сосредоточенные, т. е. действующие на площадке весьма малой по сравнению с размерами тела. В этом случае она считается приложенной
кточке (рис. 1.1 а).
−Распределенные силы могут быть приложены либо по линии
(рис. 1.1 б), измеряются в погонной нагрузки, Н/мм), или могут быть при-
ложены по площади (рис. 1.1 в), измеряются, Па).
5

а) |
б) |
в) |
Рис. 1.1. Классификация сил
Совокупность сил, действующих одновременно на тело, называется системой сил. В том случае, если две или несколько систем сил оказывают на тело одинаковое механическое воздействие, то они эквивалентны. Си-
стемы сил могут быть либо уравновешенными, т. е. не нарушающими ис-
ходное равновесие тела и неуравновешенными. По расположению в про-
странстве они могут быть либо плоскими, либо пространственными. В об-
щем случае, системы действующих сил можно заменить одной, оказываю-
щей такое же воздействие и эта сила носит название равнодействующая.
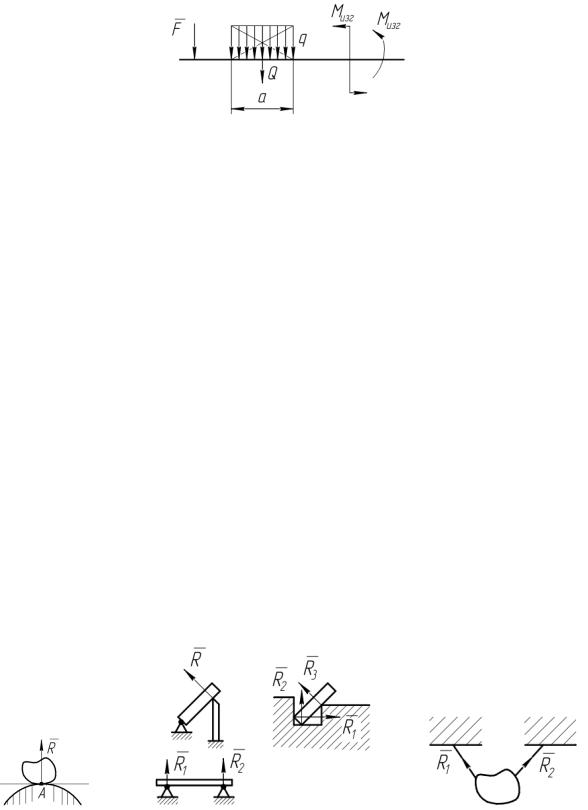
В общей сложности нагрузки действующие на балку можно разде-
лить на (рис. 1.2):
−F – сосредоточенная сила;
−q – линейно-распределенная нагрузка (при выполнении расчетов,
эту нагрузку заменяют сосредоточенной, которая равна площади распреде-
ленной нагрузки (Q = q·a), и приложенной в центре тяжести.
− Мизг – на балку действует пара сил, которые дают изгибающий момент и приводит к изгибу балки.
Если данное твердое тело может получать перемещения в простран-
стве, то такое тело называют свободным. Если же тело поставлено в такие условия, что некоторые перемещения становятся для него невозможными,
6
то такое тело не свободное. Эти условия, стесняющие свободу движения тела, называют в механике связями.
Рис. 1.2. Классификация нагрузок действующих на балку
По третьему закону Ньютона со стороны связей к телу приложены силы, которые называют реакциями.
Направление реакции связи всегда противоположно тому направле-
нию, по которому связь препятствует двигаться данному телу.
В зависимости от характера закрепления тела или вида опоры можно указать следующие основные типы связи (рис. 1.3):
а) тело опирается на неподвижную поверхность в точке А. В этом случае, реакция опорной поверхности приложена к телу в точке А и
направлена по нормали к опорной поверхности;
б) тело опирается на остроугольную поверхность. В этом случае ре-
акция направлена по нормали к поверхности тела;
в) если связи осуществляются при помощи гибких нитей, то реакции направлены вдоль этих нитей.
а) |
б) |
в) |
|
Рис. 1.3. Основные виды реакций связи |
|
|
7 |
|

Для определения реакций связи в статике, используются условия равновесия, которые для объемного состояния можно записать следующи-
ми системами уравнений:
Rx Fxi 0,Ry Fyi 0,
Rz Fzi 0.
Mx Mx(Fi ) 0,My My( Fi ) 0,
Mz Mz(Fi ) 0.
Для плоского состояния:
Rx Fxi 0,
Ry Fyi 0,
M M( Fi ) 0.
(1.1)
(1.2)
(1.3)
В данных системах использовано разложение результирующей силы на оси координат (х, y). Для нахождения общей результирующей исполь-
зуют уравнение:
R |
Rx2 Ry2 . |
(1.4) |
8

1.1. Плоская система сил. Усилия в стержнях
Пример 1. Дано:
Шарнирный трехзвенник ABC удерживает в равновесии груз, подве-
шенный к шарнирному болту С. Под действием груза весом G стержень
АС сжат силой F2 = 25 Н. Заданы углы α=60° и β=45°. Считая стержни АС
и BC невесомыми, определить усилие в стержне ВС, и вес груза G.
Рис. 1.4. Схема для задачи 1.1
Решение:
Проведем оси координат. Так как система находится в равновесии,
то используя условия равновесия плоской системы сходящихся сил (1.3),
можно записать:
Rx Fxi F1 sin(180 ) F2 sin( ) 0,
Ry Fyi F1 cos(180 ) F2 cos( ) G 0.
Из первого выражаем искомую силу:
F1 |
F2 sin( ) |
|
25 sin(60) |
22,41Н. |
sin(180 ) |
sin(180 60 45) |
Из второго:
GF1 cos(180 ) F2 cos( )
22,41 cos(180 60 45) 25 cos(60) 18,3Н.
9
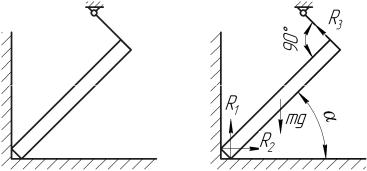
Пример 2. Дано:
Однородный стержень ОА упирается одним концом в угол и удержи-
вается за другой конец нитью (рис. 1.5 а). Масса стержня m=10 кг, а угол его наклона к горизонту равен α=45 º. Сила натяжения нити 20 Н. Найти силы, с которыми стержень давит на пол и на стену.
а) б)
Рис. 1.5. Схема для задачи 1.2
Решение:
На стержень действуют четыре силы: сила тяжести G=mg, силы нор-
мальных реакций пола R1 и стены R2, сила натяжения нити R3.
Поместим рассматриваемую балку в систему координат. Так как стержень находится в равновесии, то из системы (1.3):
Rx Fxi R2 R3 cos 90 0,
Ry Fyi R1 mg R3 sin 90 0.
Из второго уравнения находи искомую величину R1:
R1 mg R3 sin 90 10 9,81 20 sin(90 45) 83,95Н.
Из первого уравнения R2:
R2 R3 cos 90 59,36Н.
10