

Lektsii_ispyt
.pdf41
отклонением значения от единицы, верхнюю границу частотного диапазона преобразователя можно найти из условия
X амп |
|
|
|
|
|
1 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
X cт ст |
|
p2 |
2 |
|
4 p2 2 |
||||||
|
|
|
1 |
|
|
|
|
|
|
||
|
2 |
4 |
|||||||||
|
|
|
|
|
|
|
|||||
Как следует из этого выражения, при уровне амплитудной погрешности около 5% верхнюю границу частотного диапазона можно принять равной
(0,15—0,2) ω.
Электрические промежуточные преобразователи служат для преобразования выходного параметра Х(t) первичной механической системы в электрический сигнал. По принципу работы электрические преобразователи подразделяют на две основные группы — генераторные и параметрические.
Генераторные осуществляют прямое преобразование механической энергии в электрический сигнал. Вырабатываемая ими ЭДС пропорциональна скорости изменения преобразуемой механической величины.
К генераторным относятся индукционные и пьезоэлектрические преобразователи. Индукционный преобразователь состоит из многовитковой катушки, помещенной в магнитное поле. При перемещении катушки относительно магнитных силовых линий в обмотке индуктируется ЭДС:
e |
Bnl |
, |
|||
dx |
|||||
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
dt |
|
|||
где В — индукция поля магнита; п — число витков; l— длина проводника, находящегося в магнитном поле; dxdt - скорость.
Индукционные преобразователя, работающие в режиме виброметра, выполняют с относительно мощным магнитом и многовитковой катушкой индуктивности; они отличаются высокой чувствительностью.
Пьезоэлектрические преобразователи представляют собой небольшие диски, вырезанные из специальных материалов, обладающих пьезоэффектом: сегнетовой соли, титаната бария и др. При изменении усилия, действующего на такие пластины, происходит приращение электрического заряда на обкладках пьезоэлемента. Обычно при использовании пьезопреобразователей измеряется не величина заряда, а развиваемое ими напряжение сигнала. Верхний предел частотного диапазона преобразователя зависит от резонансной частоты пьезоэлемента. Обычно верхняя граница частотного диапазона достигает десятков килогерц, поэтому пьезоэлектрические преобразователи чаще всего используются в акселерометрах, динамометрах, где они одновременно выполняют роль и упругого элемента. Поскольку индукционные и пьезоэлектрические преобразователи реагируют лишь на динамическую составляющую
42
механического воздействия, они используются только в виброизмерительных устройствах.
Параметрические преобразователи представляют собой устройства,
в которых под действием измеряемых механических величин изменяются параметры электрической цепи: индуктивность, емкость, сопротивление, частота и т. д. Параметрические преобразователи — индуктивные, емкостные, резисторные— универсальны: в соответствующее изменение электрического параметра они позволяют преобразовать как динамическую, так и статическую составляющую выходной механической величины.
Индуктивные преобразователи выполняют дроссельного,
соленоидного и трансформаторного типов. Дроссельный преобразователь с изменяющимся воздушным зазором схематично показан на рис. 33 а. Катушки 1 питаются генератором переменного тока 3; при перемещении сердечника 2 (изменении зазора δ меняется индуктивность L контура и, следовательно, реактивное сопротивление катушки:
L |
|
2 F |
, |
|
|
2 2 |
|
где ω - круговая частота переменного тока; μ — магнитная проницаемость среды в зазоре; F - площадь поперечного сечения участка воздушного зазора.
Зависимость индуктивности контура L от зазора δ можно принять линейной лишь при условии, если , поэтому диапазон измерения перемещений такими преобразователями невелик, он составляет от 0,1 до 1 мм, но порог чувствительности min может достигать от 0,1 до 0,2 мкм. При
измерении больших перемещений (20— 30 мм) используются преобразователи соленоидного типа (рис. 33 б); изменение индуктивности таких преобразователей вызывается перемещением в катушке 1 ферромагнитного сердечника 2. Трансформаторные индуктивные преобразователи (рис. 33 в) отличаются от дроссельных наличием вторичных обмоток 4, в которых индуктируется электродвижущая сила. Величина индуктируемого напряжения зависит от смещения замыкающей пластины 2 трансформатора.
Недостатком индуктивных преобразователей является их чувствительность ко многим влияющим факторам: изменению напряжения и частоты питающего генератора, изменению магнитной проницаемости воздушного зазора, наводкам внешних магнитных полей и др. Для компенсации влияющих факторов и значительного нулевого сигнала применяются дифференциальные или мостовые схемы включения катушек преобразователя. Как видно из рис. 33, обмотки катушек включены в смежные плечи (z1 и z2),

43
Рис. 33. Индуктивные преобразователи
четырехполюсной мостовой цепи. При полной симметрии плеч z1 и z2 такое включение позволяет компенсировать влияние многих внешних факторов.
Резисторные преобразователи омического сопротивления применяются, в основном, двух типов: реостатный и тензорезисторный. Сопротивление реостатного преобразователя изменяется пропорционально линейному или угловому перемещению ползунка токосъемника. Ползунок соединен с перемещающимся звеном первичного механического преобразователя.
Тензорезисторные преобразователи являются в настоящее время наиболее распространенным и самым универсальным средством преобразования деформации твердого тела в электрический сигнал. Принцип действия тензорезистора основан на свойстве проводниковых и полупроводниковых материалов изменять омическое сопротивление при деформировании. Это свойство называется тензоэффектом. Чувствительный элемент проводникового тензорезистора изготовляют из проволоки диаметром 10—25 мкм или тонкой фольги толщиной 2—5 мкм.
На рис. 34 показаны чувствительные элементы тензорезисторов в виде линейного проводника и плоской спирали. Чувствительный элемент 1 имеет выводные концы 2 и прикреплен к бумажной или пленочной подложке,
которая приклеивается к поверхности |
исследуемого объекта. Собственно |
|||||
слой |
связующего (клей, |
цемент) |
и подложка 3 выполняют функции |
|||
первичного |
механического |
преобразователя, |
который |
воспринимает |
||
деформацию |
объекта и |
передает ее |
чувствительному элементу |
|||
тензорезистора. Чувствительность такого преобразователя зависит от модуля сдвига и толщины слоя материала связующего, включая подложку, а также от формы и жесткости чувствительного элемента. Выходным сигналом тензорезистора является относительное изменение его омического
сопротивления RR . Основной характеристикой тензорезистора служит зависимость выходного сдвига от деформации. Отношение изменения
выходного сигнала к вызвавшей его относительной деформации |
lT , |
|
lT |
44
направленной вдоль оси тензоэлемента, называется коэффициентом тензочувствительности
k |
R . |
T |
R |
|
Экспериментально полученные значения коэффициента тензочувствительности для различных металлов и сплавов при упругом деформировании находятся в пределах от -12 до +6,5, а для полупроводников достигают 150— 200.
При выборе материала чувствительного элемента необходимо учитывать не только его высокую чувствительность, но и малый температурный коэффициент сопротивления. Следует отметить, что температурная погрешность, т. е. изменение сопротивления тензорезистора, обусловленное изменением температуры окружающей среды, может оказаться одного порядка с измеряемой деформацией, поэтому обычно проводниковые тензорезисторы изготовляют из сплавов меди с никелем (константан, эдванс и др.). Несмотря на то, что чувствительность констан-
тановых тензорезисторов сравнительно невелика ( kT 1,9—2,3), для них
характерна высокая стабильность электрических и механических свойств и очень малый температурный коэффициент сопротивления, примерно 2*10-6 град-1. Наиболее широко распространены проволочные и фольговые тензорезисторы.
Петлевые проволочные тензорезисторы (рис. 34 6) промышленного производства выпускаются с номинальным сопротивлением 60—400 Ом и ба зой измерения lт = 5—100 мм. Интервал рабочих температур зависит, в основном, от вида связующего. Так, при температуре жидкого азота изменение коэффициента тензочувствительности относительно его значений в нормальных условиях не превышает 2—3%. Верхняя граница температурного диапазона обычных тензорезисторов, связующим которых служат клеи типа БФ и ВП, достигают 450—490 К; для проведения измерений при температуре 700—900 К чувствительный элемент тензорезистора выполняют из нихромовых сплавов, а связующим служат кремнеорганические цементы ВН-
12, ВН-15.
Недостатком петлевых проволочных тензорезисторов является их поперечная чувствительность — изменение выходного сигнала, вызванное деформацией петель в направлении, перпендикулярном главной оси тензорезистора.
Фольговые тензорезисторы (рис. 34 в) изготовляются фотолитографским способом из тонкой константановой фольги толщиной 2—5 мкм. Предварительно нанесенная на фольгу клеевая пленка служит подложкой тензорезисторов. Прямоугольное сечение фольговых чувствительных элементов, развитых в плоскости приклейки, обеспечивает эффективный отвод тепла, что позволяет в 3—4 раза повысить, по сравнению с проволочными, плотность питающего тока и получить больший выходной сигнал. К преимуществам фольговых тензорезисторов относятся: низкая поперечная

45
чувствительность за счет увеличения площади петель; высокая технологичность изготовления и возможность получения чувствительных элементов с очень малой базой (до 0,3 мм) любой формы. Выбор оптимальной формы и размеров чувствительного элемента тензорезисторов позволяет существенно уменьшить методические погрешности при исследовании распределения компонентов деформаций вблизи концентраторов напряжений и в других случаях.
Полупроводниковые тензорезисторы изготовляют из монокристаллов кремния или германия электронной или электроэрозионной резкой, направление которой перпендикулярно главной кристаллографической плоскости. Таким способом получают пластины толщиной 0,05—0,1 мм, шириной 0,5—1 мм, из которых изготовляют тензорезисторы с базой 2—15 мм (рис. 34 г). Монокристаллические полупроводниковые тензорезисторы могут использоваться и без подложки, т. е. непосредственно приклеиваться к исследуемой поверхности.
Рис. 34. Виды тензорезисторов
Главным достоинством полупроводниковых тензорезисторов является их высокая чувствительность, примерно в 60 раз превосходящая чувствительность проводниковых. Возможность получения большого выходного сигнала (более 0,1 В) делает целесообразным применение полупроводниковых тензорезисторов в тех случаях, когда необходимо использовать простую и компактную измерительную аппаратуру. Однако полупроводниковым тензорезисторам свойственны существенные недостатки: начальное сопротивление и чувствительность зависят от температуры; высокий температурный коэффициент сопротивления (приблизительно в 60 раз больший, чем у константана); чувствительность зависит от уровня деформации; ограниченный диапазон (примерно ±0,2%) деформирования; низкий предел усталости. Указанные недостатки полупроводниковых тензорезисторов требуют тщательной компенсации температурных зависимостей основных характеристик и введения в измерительные цепи специальных элементов для линеаризации градуировочной характеристики. Поэтому полупроводниковые тензорезисторы используют, главным образом, в качестве чувствительного элемента акселерометров и тензодинамометров.
Первичные измерительные устройства (датчики) выполняют в виде отдельных приборов, конструктивно объединяющих два рассмотренных
46
выше типа преобразователей - первичный (механический) и промежуточный (электрический). Полученный на выходе датчика электрический сигнал пропорционален измеряемой величине. По своему назначению их подразделяют на датчики: перемещений (виброметры и прогибомеры), ускорения (акселерометры), сосредоточенного усилия (динамометры) и распределенного давления (мессдозы), деформации (тензометры). Приведем краткие сведения об электромеханических датчиках, которые применяются при испытании строительных конструкций и их моделей.
При проведении натурных динамических испытаний и при изучении вибросмещений, колебаний крупномасштабных моделей чаще всего применяют датчики с механическим преобразованием инерционного действия. В этом случае устройства, содержащие инерционный маятник, устанавливают непосредственно в исследуемых сечениях конструкции; несмотря на значительную массу и габариты таких приборов, они практически не вносят искажений в работу сооружения. Для преобразования относительного перемещения маятника в электрический сигнал чаще всего используются индукционные преобразователи.
Резонансная частота колебаний маятника серийных виброметров с индукционным преобразователем составляет 0,2—1,5 Гц, а максимальная измеряемая амплитуда достигает 150 мм. Виброметры с такими характеристиками используются при изучении динамических параметров высотных сооружений, гибких висячих систем.
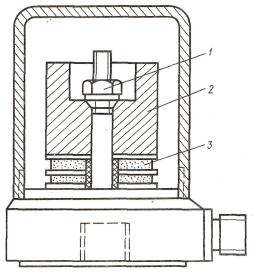
Высокочастотные акселерометры, применяемые для исследования реакции элементов конструкций и небольших моделей на импульсные, ударные воздействия, изготовляют с использованием пьезоэлектрических преобразователей. Схематический разрез такого пьезоакселерометра показан на рис. 35. Инерционная масса 2 с помощью болта 1 поджата к пьезоэлементам 3. Предварительное напряжение подбирается таким, чтобы пьезоэлементы оставались сжатыми в пределах всего рабочего диапазона измеряемых ускорений. Собственная частота колебаний такой преднапряженной жесткой системы достигает 60—80 кГц, а масса составляет
30—40 г.
47
Рис. 35. Схема пьезоакселерометра
Для измерения статических перемещений или измерения вибросмещений небольших моделей при наличии стационарного испытательного стенда упругие элементы измерительных устройств выполняют в виде П-образной рамы, арки, консольной балочки и пр. Такие измерительные устройства устанавливают на неподвижном основании вблизи испытываемого объекта с помощью специальной оснастки; при этом упругому элементу задается начальный прогиб, несколько превышающий максимальное ожидаемое перемещение обратного знака. В качестве примера на рис. 36 а показана конструкция электромеханического индикатора перемещений с консольным упругим элементом 1 и установленными вблизи заделки тензорезисторами 2. Перемещение исследуемого объекта передается консольному элементу с помощью упругого штифта 3; в зависимости от положения штифта диапазон измерения составляет 2 или 10 мм. Тензорезисторы R1 и R2, установленные на упругом элементе, включают в мостовую цепь, как показано на рис. 36 б. Мост состоит из четырех резисторов R1, R2, R3, R4 и источника тока напряжением V При выполнении условия
R1 * R4 R2 * R3
мост уравновешен, т. е. ток в измерительной диагонали 1—2 равен нулю. При изменении сопротивления одного из плеч, например, на величину R1 ,
условие равновесия нарушается и ток, проходящий через сопротивление нагрузки Rн, вызывает падение напряжения на этом участке цепи V .
В общем случае напряжение разбаланса моста V зависит от всех элементов электрической цепи. Однако на практике сопротивления тензорезисто-ров R1 и R2 обычно подбирают практически одинаковыми, а в плечи моста Rз и R4 включают два идентичных высокостабильных резистора R. При такой симметрии моста и относительно большом сопротивлении
нагрузки — |
Rн |
1 напряжение выходного |
сигнала |
V |
можно |
||||||||||
R |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
представить в |
виде |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
V |
|
|
|
R |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
|
|
. |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
R |
1 |
|
|
|
|||
|
|
|
|
|
R |
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
|
|
|
R1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если R1 — проводниковый тензорезистор с коэффициентом |
|
тензочувствительности kT , приближенно |
равном 2 kT 2 , а диапазон |
измерения деформаций не менее 1% и |
R1 2%, то выражение для |
|
R1 |
разбаланса моста примет вид:
48 |
|
|
|
|
|
|
V |
|
R1 |
|
|
V |
|
. |
|||
|
|
||||
4 |
|
R1 |
|
||
|
|
||||
Согласно этому выражению, сигнал разбаланса моста V пропорционален относительному изменению сопротивления тензорезистора R1. В рассматриваемом прогибомере оба тензорезистора R1 и R2 установлены
на упругом элементе |
и |
измеряют |
одинаковую |
деформацию, но |
|||
|
R1 |
|
R2 |
|
|
|
|
противоположного знака |
|
. |
В этом случае |
сигнал разбаланса |
|||
|
|
||||||
|
R1 |
|
|
|
|
|
|
|
|
R2 |
|
|
|||
моста равен удвоенному значению R1  R1 . Кроме того, включение в
R1 . Кроме того, включение в
смежные плечи моста тензорезисторов R1 и R2, установленных на один и тот же объект и находящихся в одинаковых условиях ко всем внешним факторам, позволяет автоматически компенсировать влияние этих факторов. Например, изменение окружающей температуры приведет к одинаковому изменению сопротивления этих тензорезисторов. Но поскольку они включены в смежные плечи мостовой цепи, то условие баланса не нарушается. Таким образом, если внешние факторы вызывают одинаковое изменение сопротивления смежных плеч моста, то мостовая схема автоматически осуществляет компенсацию этих факторов. Такой прием компенсации погрешностей широко используется в метрологии.
В двухконсольном электромеханическом прогибомере с жесткими передаточными элементами (рис. 36 в) в мостовую цепь включены все четыре тензорезистора 2. В этом случае выходной сигнал V
пропорционален учетверенному значению |
R |
любого из установленных |
|
R |
|
тензорезисторов. Кроме того, выполняется и условие термокомпенсации тензорезисторов. Достоинством механической системы рассматриваемого прогибомера является то, что линейность функции преобразования перемещений в электрический сигнал сохраняется при относительно больших прогибах упругих консольных элементов 1. Располагая набором сменных балочек разной жесткости, можно в широких пределах варьировать амплитудный и частотный диапазон такого виброметра перемещения, а также подбирать требуемый коэффициент преобразования.
Для проведения длительных измерений очень малых перемещений разработаны электромеханические преобразователи в виде жесткой пластины / с упругим шарниром (рис. 36 г). В качестве промежуточных использованы резисторные преобразователи 2 и 4, представляющие собой натянутую тензорезисторную проволоку, концы которой прикреплены к упорам — изоляторам 3. Механическая система выполнена таким образом, что верхний 2 и нижний 4 проволочные резисторы подвергаются деформациям разного знака и, следовательно, могут быть включены в смежные плечи мостовой цепи. Важными достоинствами такого измерителя перемещений являются возможность увеличения масштаба преобразования и стабильность его статической характеристики во времени.

49
Рис. 36. Универсальные измерители перемещенй
В качестве упругого элемента первичного преобразователя динамометра часто используют сплошной или полый стержень. При измерении сравнительно небольших усилий или при исследовании низкочастотного процесса нагруже-ния в качестве упругого элемента может служить относительно податливое кольцо или балочка.
При измерении динамических усилий, вызванных импульсными воздействиями, следует учитывать волновой характер распределения воздействия, в связи с чем необходимо предъявлять определенные требования не только к частоте собственных колебаний упругого элемента, но и его размерам, жесткости крепления и др. Малые габариты динамометра позволяют максимально приблизить его к той зоне конструкции, которая непосредственно воспринимает импульсную нагрузку, и регистрировать воздействие с минимальным запаздыванием.
Несколько простейших схем динамометров с тензорезисторными преобразователями приведены на рис. 37. Оптимальное размещение тензорезисторов на упругом элементе динамометра предусматривает полную компенсацию температурных погрешностей и увеличение чувствительности измерительной цепи. С этой целью в смежные плечи моста включают тензорезисторы (R1 и R2), измеряющие продольную и поперечную деформацию стержневого динамометра (рис. 37 а).
На рис. 37 б показан упругий элемент динамометра, состоящий из двух полых, концентрически скрепленных цилиндров. При действии нагрузки деформации стенок внутреннего и внешнего цилиндров одинаковы, но противоположного знака — соответственно растяжение и сжатие. Поэтому при включении тензорезисторов в измерительную схему может быть

50
достигнуто четырехкратное увеличение чувствительности моста. Аналогичный прием реализуется и на упругом элементе кольцевого типа (рис. 37 в), где деформации тензорезисторов R1 и R2 (R3 и R4) также противоположного знака.
Рис. 37. Схема установки тензорезисторов преобразователей на упругие элементы динамометров
Упругой системой, воспринимающей нормально распределенную нагрузку, обычно служит круглая пластина или гофрированная мембрана (рис. 38). В качестве промежуточных преобразователей используются индуктивные, тензорезисторные, пьезоэлектрические. Датчики давления с пьезокерамичес-кими преобразователями используют главным образом при изучении высокочастотной пульсации или при весьма крутом фронте нарастания воздействия.
Серийно выпускаются широко распространенные преобразователи давления индуктивного типа ДД-10 и ДД-6. В датчике ДД-10 пластина, воспринимающая давление, выточена вместе с корпусом и служит якорем индуктивной системы (образованной рабочей и компенсационной катушка-